You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- TDK Ambient Light SensorDocument7 pagesTDK Ambient Light SensorvagncarisiusNo ratings yet
- Apple Iphone Fingerprint SensorDocument5 pagesApple Iphone Fingerprint SensorvagncarisiusNo ratings yet
- Nokia 5G New Radio White Paper EN PDFDocument14 pagesNokia 5G New Radio White Paper EN PDFvagncarisiusNo ratings yet
- EUT Internal Photos Exhibit CDocument8 pagesEUT Internal Photos Exhibit CvagncarisiusNo ratings yet
- Apple, Inc. (AAPL) Overweight: Car Would Yield Small Initial Revenue, But Big Enough To Move Needle Long TermDocument6 pagesApple, Inc. (AAPL) Overweight: Car Would Yield Small Initial Revenue, But Big Enough To Move Needle Long TermvagncarisiusNo ratings yet
- FCC/IC Manual RequirementsDocument2 pagesFCC/IC Manual RequirementsvagncarisiusNo ratings yet
- Airvana FemtocellDocument33 pagesAirvana FemtocellvagncarisiusNo ratings yet
- Bio TerrorismDocument7 pagesBio TerrorismvagncarisiusNo ratings yet
- 3M Fingerprint SensorDocument3 pages3M Fingerprint SensorvagncarisiusNo ratings yet
- Powerwave 10KDocument37 pagesPowerwave 10KvagncarisiusNo ratings yet
- Cellular phone parts list exploded viewDocument1 pageCellular phone parts list exploded viewvagncarisiusNo ratings yet
- Samsung Galaxy NoteDocument73 pagesSamsung Galaxy NotevagncarisiusNo ratings yet
- Avago LTE PADocument13 pagesAvago LTE PAvagncarisiusNo ratings yet
- Ubidyne Antenna PatentDocument23 pagesUbidyne Antenna PatentvagncarisiusNo ratings yet
- ExtremeLine Microwave Antennas BrochureDocument8 pagesExtremeLine Microwave Antennas BrochureoldjanusNo ratings yet
- ATT WLAN Connections 2011Document1 pageATT WLAN Connections 2011vagncarisiusNo ratings yet
- Snapdragon 8x55 Product Brief 3Document2 pagesSnapdragon 8x55 Product Brief 3vagncarisiusNo ratings yet
- 0907 CTP PresentationDocument15 pages0907 CTP Presentationnocivi38No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Comparing Effective Surface Areas of Random PackingsDocument10 pagesComparing Effective Surface Areas of Random PackingsAntonio MezzopreteNo ratings yet
- Cementing EquipDocument12 pagesCementing Equipzbhdzp100% (1)
- Choice of Steel Material To Avoid Brittle Fracture For Hollow Section StructuresDocument204 pagesChoice of Steel Material To Avoid Brittle Fracture For Hollow Section Structuresg1n2No ratings yet
- Wiki Unified Soil Classification SystemDocument2 pagesWiki Unified Soil Classification SystemGIRISHA001No ratings yet
- 4363 111 Machine Design IDocument6 pages4363 111 Machine Design Iyogesh_b_k100% (2)
- 53 TOP Structural Analysis - Civil Engineering Multiple Choice Questions AnDocument7 pages53 TOP Structural Analysis - Civil Engineering Multiple Choice Questions AnJohn Aries Almelor Sarza100% (1)
- Blue Jackson ErrataDocument6 pagesBlue Jackson Errataplucht1No ratings yet
- Anti Derivative Chain RuleDocument4 pagesAnti Derivative Chain Ruletutorciecle123No ratings yet
- Jawaharlal Nehru Technological University KakinadaDocument4 pagesJawaharlal Nehru Technological University KakinadaVenkat ChadalavadaNo ratings yet
- Diketopiperazines RevDocument27 pagesDiketopiperazines RevIsaí MillánNo ratings yet
- University of Engineering and Technology Peshawar, PakistanDocument54 pagesUniversity of Engineering and Technology Peshawar, PakistanJoachim GardNo ratings yet
- Analysis of The Tablet Coating ProcessDocument17 pagesAnalysis of The Tablet Coating Processشروق سعد الدينNo ratings yet
- Slope ND DeflectionDocument19 pagesSlope ND DeflectionprashantbaraskarNo ratings yet
- STAAD Service Stage and Seismic Analysis ResultsDocument14 pagesSTAAD Service Stage and Seismic Analysis ResultsVikasNo ratings yet
- Interference PatternsDocument8 pagesInterference PatternsAsa mathewNo ratings yet
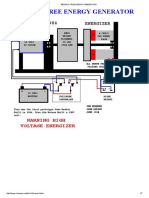
- Bedini's Free Energy Generator PDFDocument7 pagesBedini's Free Energy Generator PDFRafly Attila Al-Fiqri71% (7)
- ZDocument265 pagesZAdal ContrerasNo ratings yet
- PEGN 419 / GPGN 419 Spring 2017: Manika Prasad Mansur Ermila Expert Resource: Robert LieberDocument30 pagesPEGN 419 / GPGN 419 Spring 2017: Manika Prasad Mansur Ermila Expert Resource: Robert LiebertahermohNo ratings yet
- IOE, TU Questions and Solutions: Engineering Physics (for BE first yearDocument235 pagesIOE, TU Questions and Solutions: Engineering Physics (for BE first yearRajeev PaudelNo ratings yet
- Harmonic Oscillator & Rigid Rotor ModelsDocument14 pagesHarmonic Oscillator & Rigid Rotor ModelsJisu RyuNo ratings yet
- Heat Transfer Chapter 1 IntroductionDocument68 pagesHeat Transfer Chapter 1 IntroductionsubratorajNo ratings yet
- Jar TestDocument1 pageJar TestEduardo Tonino Chavez GaytanNo ratings yet
- Numerical Programming I (For CSE) : Final ExamDocument7 pagesNumerical Programming I (For CSE) : Final ExamhisuinNo ratings yet
- How To Build With CobDocument33 pagesHow To Build With CobmandritsopoulosNo ratings yet
- Beryllium and Beryllium Compounds: 2005 Wiley-Vch Verlag GMBH & Co. Kgaa, WeinheimDocument28 pagesBeryllium and Beryllium Compounds: 2005 Wiley-Vch Verlag GMBH & Co. Kgaa, WeinheimjaimeNo ratings yet
- Pure Substances Mixtures and SolutionsDocument18 pagesPure Substances Mixtures and SolutionsJoanna Angela LeeNo ratings yet
- Development of Biomass-Based Plastic Resins From Natural Algal PolysaccharidesDocument72 pagesDevelopment of Biomass-Based Plastic Resins From Natural Algal Polysaccharidesjustin_domingo_2100% (2)
- BelowsDocument35 pagesBelowstejassidhpuraNo ratings yet
- Engineering Mechanics by TimoshenkoDocument607 pagesEngineering Mechanics by TimoshenkoJagadish50% (2)
- Teacher Guide Activity 2 AccelerationDocument4 pagesTeacher Guide Activity 2 AccelerationCanada Railway TimesNo ratings yet