You might also like
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- Special Electrical Machines Ee2403 PDFDocument16 pagesSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 pagesElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNo ratings yet
- AC DC DrivesDocument13 pagesAC DC Drives322399mk7086No ratings yet
- DC Machines Lab ManualDocument56 pagesDC Machines Lab ManualRockstar RichNo ratings yet
- Drives and Control Lab ManualDocument36 pagesDrives and Control Lab ManualKabilanNo ratings yet
- Direct Torque Control On BLDC Motor For Electric VehicleDocument10 pagesDirect Torque Control On BLDC Motor For Electric VehicleIJRASETPublicationsNo ratings yet
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuNo ratings yet
- V and Inverted V Curves of Synchronous MotorDocument7 pagesV and Inverted V Curves of Synchronous Motorkarthikeyan249No ratings yet
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNo ratings yet
- Hopkinson Test On DC Shunt MotorDocument5 pagesHopkinson Test On DC Shunt MotorVarun VadluriNo ratings yet
- Power Electronics Lab Manual1Document72 pagesPower Electronics Lab Manual1Harish SvNo ratings yet
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDocument4 pages2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- Power Electronics Lab Manual PDFDocument41 pagesPower Electronics Lab Manual PDFSudhakar MarojuNo ratings yet
- Power Electronics Lab ManualDocument89 pagesPower Electronics Lab ManualPartha DewriNo ratings yet
- Machies Singly ExcitedDocument15 pagesMachies Singly ExcitedMohamed ElfekyNo ratings yet
- EquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction MotorDocument13 pagesEquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction Motoraili_avinashNo ratings yet
- PSIM MANUAL For StudentsDocument23 pagesPSIM MANUAL For StudentsSomnath Khamaru75% (4)
- MMME2104 Synchronous Generators Electrical ComponentsDocument38 pagesMMME2104 Synchronous Generators Electrical ComponentsMd Rodi BidinNo ratings yet
- Closed Loop Control of Separately Excited DC MotorDocument13 pagesClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINo ratings yet
- Ac Machines Lab ManualDocument102 pagesAc Machines Lab ManualAshwin Gopinath100% (3)
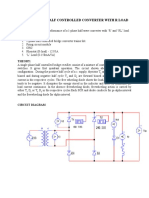
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNo ratings yet
- SSSC PPT (Autosaved)Document14 pagesSSSC PPT (Autosaved)shubham bansalNo ratings yet
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 pagesFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna Veni ProfessorNo ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- AKT - Cycloconverter CDocument19 pagesAKT - Cycloconverter CDrAshok Kumar TiwariNo ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocument18 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DNo ratings yet
- PX7203-Special Electrical Machines PDFDocument11 pagesPX7203-Special Electrical Machines PDFvaishnavisriNo ratings yet
- Assignment Induction MotorsDocument3 pagesAssignment Induction MotorsMallikarjunBhiradeNo ratings yet
- Injection of EMF in The Rotor CircuitDocument3 pagesInjection of EMF in The Rotor CircuitAbhishekGuptaNo ratings yet
- Unit 3Document5 pagesUnit 3Narasimman DonNo ratings yet
- VTU Guide Measures Resistance Using Wheatstone BridgeDocument18 pagesVTU Guide Measures Resistance Using Wheatstone Bridgevnyshreyas100% (2)
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Flexible AC Transmission SystemDocument3 pagesFlexible AC Transmission SystemSatya SahaNo ratings yet
- Brake Test On 3 Phase Slip Ring Induction MotorDocument5 pagesBrake Test On 3 Phase Slip Ring Induction MotorRajeev Sai0% (1)
- Synchronous Generators - 2 Marks Questions and AnswersDocument3 pagesSynchronous Generators - 2 Marks Questions and AnswersJoseph Harindranath67% (3)
- Sem QuestionsDocument11 pagesSem QuestionsRojaNo ratings yet
- Power System Stability - Unit 4 PSOCDocument57 pagesPower System Stability - Unit 4 PSOChareesh.makesuNo ratings yet
- IDA - QuesbankDocument10 pagesIDA - QuesbankKavitha KaviNo ratings yet
- Design & Fabrication of 1-Ph Induction Motor Starter MANUALDocument5 pagesDesign & Fabrication of 1-Ph Induction Motor Starter MANUALSreenidhi SrungaramNo ratings yet
- 360 Topic 6 DC MachineDocument33 pages360 Topic 6 DC MachineAchsan ArfandiNo ratings yet
- DC MachinesDocument52 pagesDC MachinesArun Kumar100% (1)
- Scott Connection of Transformers TitleDocument6 pagesScott Connection of Transformers TitleSheri Abhishek ReddyNo ratings yet
- III Eee 05 Ee8501 Psa Unit 1Document37 pagesIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANNo ratings yet
- BrakingDocument19 pagesBrakingMohammad Umar RehmanNo ratings yet
- MA-415 Industrial Drives Lab IndexDocument19 pagesMA-415 Industrial Drives Lab IndexMayankJainNo ratings yet
- DC Shunt Motor Change DrictionDocument4 pagesDC Shunt Motor Change Drictionnved01No ratings yet
- ED LAB ManualDocument31 pagesED LAB Manualmanoj kumar100% (1)
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- Lab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterDocument6 pagesLab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterSadil BatafNo ratings yet
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- PS Lab ManualDocument25 pagesPS Lab ManualPhani PhaniNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- EM2 - Lab - 10 - Synchronous Motor Part I - STD PDFDocument7 pagesEM2 - Lab - 10 - Synchronous Motor Part I - STD PDFneonNo ratings yet
- Analysis of Self Excited Induction Generator Delta Connected Resistive LoadDocument24 pagesAnalysis of Self Excited Induction Generator Delta Connected Resistive LoadHemant KumarNo ratings yet
- Lab Report: Engineering Analysis and Design (EEN 206)Document6 pagesLab Report: Engineering Analysis and Design (EEN 206)saksham mahajanNo ratings yet
- Speed Control of DC Motor by Armature Resistance ControlDocument8 pagesSpeed Control of DC Motor by Armature Resistance ControlKosigar ChelladoraiNo ratings yet
- Braking Schemes of TractionDocument7 pagesBraking Schemes of TractionSuraj BhushanNo ratings yet
- Experiment No: 2 19BEE069 Date:-18/01/2022Document5 pagesExperiment No: 2 19BEE069 Date:-18/01/2022R.D SutariyaNo ratings yet
- Three Phase Inductioin Motor Test AhmedDocument9 pagesThree Phase Inductioin Motor Test Ahmedmearggebremedhin2013No ratings yet
- Plant specification and bill of quantityDocument4 pagesPlant specification and bill of quantitylewgne08No ratings yet
- Constant Log BCJR Turbo Decoder With Pipelined ArchitectureDocument5 pagesConstant Log BCJR Turbo Decoder With Pipelined ArchitectureInternational Journal of Scientific Research and Engineering StudiesNo ratings yet
- Electrical ConduitsDocument8 pagesElectrical ConduitsFrisco Gabriel100% (1)
- Learning Element 3Document17 pagesLearning Element 3niel lunaNo ratings yet
- Rockwell-Samsung RC1 Controller ManualDocument330 pagesRockwell-Samsung RC1 Controller ManualTấn Hồ0% (1)
- Justin Snyder ResumeDocument1 pageJustin Snyder Resumeapi-437591351No ratings yet
- Problem 2.87Document5 pagesProblem 2.87Eric Castillo MartínezNo ratings yet
- TSSN Question Bank Ece IV NRCMDocument17 pagesTSSN Question Bank Ece IV NRCMbooks babu100% (1)
- Crydom DC60 DataSheetDocument6 pagesCrydom DC60 DataSheetJose Carlos SoaresNo ratings yet
- GPCB Late Fees CircularDocument2 pagesGPCB Late Fees CircularChirag JainNo ratings yet
- Electrical Machines-I Lab ManualDocument62 pagesElectrical Machines-I Lab ManualRaviNo ratings yet
- To Design and Simulate Priority EncoderDocument6 pagesTo Design and Simulate Priority EncoderShubham GargNo ratings yet
- HIGH SPEED NETWORK Final Exam (A)Document2 pagesHIGH SPEED NETWORK Final Exam (A)Hussein A. AlsameeNo ratings yet
- Bandwidth Enhancement Using Microstrip Patch Antenna - Project Phase-1Document104 pagesBandwidth Enhancement Using Microstrip Patch Antenna - Project Phase-1Rbalaji BeeceNo ratings yet
- Full-Color Micro-LED Display With CsPbBr3 Perovskite and CdSe Quantum Dots As Color Conversion LayersDocument6 pagesFull-Color Micro-LED Display With CsPbBr3 Perovskite and CdSe Quantum Dots As Color Conversion Layers18maxwell61No ratings yet
- Change Over Socomec ATYS-PMDocument2 pagesChange Over Socomec ATYS-PMHrvoje DubravaNo ratings yet
- Transition From MELSEC-A&QnA (Large Type) Series To Q Series Handbook (Fundamentals) L08043enggDocument298 pagesTransition From MELSEC-A&QnA (Large Type) Series To Q Series Handbook (Fundamentals) L08043enggAym BrNo ratings yet
- Electrical Transformer Losses GuideDocument4 pagesElectrical Transformer Losses GuidesauravNo ratings yet
- Selection Guide of Tonghui Accessories 20181227Document17 pagesSelection Guide of Tonghui Accessories 20181227prasadNo ratings yet
- Inspiron 24 5400 Aio - Service Manual - en UsDocument73 pagesInspiron 24 5400 Aio - Service Manual - en Ussimplu649No ratings yet
- Amba Axi ProtocolDocument30 pagesAmba Axi Protocolanon_82531963No ratings yet
- Methods of Protection - Flameproof ExdDocument2 pagesMethods of Protection - Flameproof ExdSyam DevNo ratings yet
- Ece Smart QuillDocument21 pagesEce Smart QuillRajanikant UpadhyeNo ratings yet
- APC Symmetra PX-2Document8 pagesAPC Symmetra PX-2drastir_777No ratings yet
- Railway Track Crack DetectionDocument24 pagesRailway Track Crack Detectionraghuveertrilochan100% (1)
- Mallory Installation InstructionsDocument4 pagesMallory Installation Instructionssantacruz08aNo ratings yet
- TSI Media 48 230 Inverter Data Sheet Version 02Document2 pagesTSI Media 48 230 Inverter Data Sheet Version 02Morne PelserNo ratings yet
- 15 Panel FabricationDocument36 pages15 Panel FabricationhkshahNo ratings yet
- Input Filter Compensation For Switching Regulators by S S KelkarDocument371 pagesInput Filter Compensation For Switching Regulators by S S KelkarshrikrisNo ratings yet
- EEE363 (Exp 5) Study of The Different Loading Conditions of AlternatorDocument5 pagesEEE363 (Exp 5) Study of The Different Loading Conditions of Alternatorsalad.ass420420No ratings yet