You might also like
- Chapter 2 - Plate Tectonics and Earthquakes - 2023 Session OnwardsDocument15 pagesChapter 2 - Plate Tectonics and Earthquakes - 2023 Session Onwardsabdulhannanchaudary53No ratings yet
- Chapter 3Document9 pagesChapter 3Ray MarkNo ratings yet
- Dynamics EarthDocument21 pagesDynamics EarthMahesh HanmawaleNo ratings yet
- Lab 6 - Plate Tectonics and Earth's CrustDocument10 pagesLab 6 - Plate Tectonics and Earth's CrustBrian HoskinsonNo ratings yet
- Geology Chapter 3Document9 pagesGeology Chapter 3Alemkeng BrendaNo ratings yet
- Earth Science Module 9-10Document6 pagesEarth Science Module 9-10Lopez AeraNo ratings yet
- December 2004 Indian Ocean Earthquake and TsunamiDocument60 pagesDecember 2004 Indian Ocean Earthquake and Tsunamiom prakashNo ratings yet
- Wells JGR2003Document30 pagesWells JGR2003miguel fuentesNo ratings yet
- CH-8 EarthquakesDocument3 pagesCH-8 EarthquakesAawaz ek, Aaghaz hai, Andolan hai, Nav Nirman kaNo ratings yet
- The Earth SystemDocument7 pagesThe Earth SystemrolandNo ratings yet
- Earth's Plate Boundaries ExplainedDocument44 pagesEarth's Plate Boundaries ExplainedMa’am Diana V.No ratings yet
- Sources of Tsunami and Tsunamigenic Earthquakes in Subduction ZonesDocument17 pagesSources of Tsunami and Tsunamigenic Earthquakes in Subduction ZonesNada KamiliaNo ratings yet
- EAS 1600 Lab 08 Fall 2018 "Plate Tectonics" ObjectivesDocument20 pagesEAS 1600 Lab 08 Fall 2018 "Plate Tectonics" ObjectivessamNo ratings yet
- Eq WordDocument8 pagesEq WordMahesh UniyalNo ratings yet
- EarthquakeDocument34 pagesEarthquakeRahul ShahNo ratings yet
- Week 4 Tectonic and Structural LandformDocument50 pagesWeek 4 Tectonic and Structural LandformAndri ArrahmanNo ratings yet
- Neptel BookDocument345 pagesNeptel BookWanly Pereira100% (1)
- Intraplate EarthquakeDocument4 pagesIntraplate EarthquakenouvemadNo ratings yet
- Seismic Stratigraphy of the Hawaiian Flexural Moat Reveals Landslide Deposition HistoryDocument17 pagesSeismic Stratigraphy of the Hawaiian Flexural Moat Reveals Landslide Deposition HistoryEssn MuslimahNo ratings yet
- Topic 1 - Earthquake Engineering - Plate TectonicDocument20 pagesTopic 1 - Earthquake Engineering - Plate TectonicXver MLNo ratings yet
- Lecture 5 Elastic Rebound Theory PDFDocument6 pagesLecture 5 Elastic Rebound Theory PDFHari Ram0% (1)
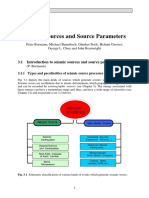
- 3.1 Introduction To Seismic Sources and Source ParametersDocument94 pages3.1 Introduction To Seismic Sources and Source Parameterssuman subediNo ratings yet
- Active Continental MarginDocument6 pagesActive Continental MarginpotongbebekangsaNo ratings yet
- Science Student TeacherDocument2 pagesScience Student TeacherpurplieliaNo ratings yet
- Plate Tectonics Week 1Document56 pagesPlate Tectonics Week 1liza rimpaNo ratings yet
- 1.1. Basics On Earthquakes - CE 305Document5 pages1.1. Basics On Earthquakes - CE 305Anonymous 09No ratings yet
- 1 Seismology For Civil EngineersDocument14 pages1 Seismology For Civil EngineersParaschiv VictorNo ratings yet
- Lecture 1Document41 pagesLecture 1Sujata SarkarNo ratings yet
- CVS01Document8 pagesCVS01Janella CantaraNo ratings yet
- Equivalent Lateral EarthquakeDocument36 pagesEquivalent Lateral EarthquakeAsif HameedNo ratings yet
- 3 - Basins Due To Lithospheric Stretching - Part1 - Lunes 23 de MarzoDocument39 pages3 - Basins Due To Lithospheric Stretching - Part1 - Lunes 23 de MarzoAlejandra Alvarado VallejoNo ratings yet
- Fuente Sísmica: Dinámica de Suelos IC0-620 Ingeniería Civil Universidad EAFITDocument53 pagesFuente Sísmica: Dinámica de Suelos IC0-620 Ingeniería Civil Universidad EAFITJorgeNo ratings yet
- Elements of Sisomology: Understanding EarthquakesDocument11 pagesElements of Sisomology: Understanding EarthquakesRohan ShreshthiNo ratings yet
- Lec # 1Document43 pagesLec # 1Rajpoot WritesNo ratings yet
- Understanding Earthquakes: Causes, Effects and TerminologyDocument22 pagesUnderstanding Earthquakes: Causes, Effects and TerminologyRahul SharmaNo ratings yet
- Unit 3 Earthquake Causes and CharacteristicsDocument29 pagesUnit 3 Earthquake Causes and CharacteristicsSalam DamitNo ratings yet
- Martian Layered Fluvial Deposits: Implications For Noachian Climate ScenariosDocument4 pagesMartian Layered Fluvial Deposits: Implications For Noachian Climate Scenariosjogger_VJNo ratings yet
- VUDEEVUDEE'S BLOG: ENDOGENIC AND EXOGENIC PROCESSESDocument18 pagesVUDEEVUDEE'S BLOG: ENDOGENIC AND EXOGENIC PROCESSESTiken TakhellambamNo ratings yet
- 1-131 Introduction To Seismology PDFDocument31 pages1-131 Introduction To Seismology PDFAbdalrahim Al Rantisi100% (2)
- SSE 102 Module 4Document8 pagesSSE 102 Module 4RubyBarnacheaNo ratings yet
- Plate Tectonics Map AnalysisDocument10 pagesPlate Tectonics Map AnalysisJohanAlfonsoNo ratings yet
- Tektonik LempengDocument69 pagesTektonik LempengAcon YusufNo ratings yet
- Plate TectonicsDocument9 pagesPlate TectonicsEdison BecerraNo ratings yet
- Plate Tectonics 7th GradeDocument40 pagesPlate Tectonics 7th Gradesrabani22No ratings yet
- Unit 1 Elements of Earthquake EngineeringDocument45 pagesUnit 1 Elements of Earthquake EngineeringDark KnightNo ratings yet
- EXAM 3 Study GuideDocument24 pagesEXAM 3 Study GuideIsmael MorenoNo ratings yet
- Different Processes That Occurs Along The Convergent BoundariesDocument14 pagesDifferent Processes That Occurs Along The Convergent BoundariesMarian FiguracionNo ratings yet
- 3 CIV2102 Dynamic GeologyDocument143 pages3 CIV2102 Dynamic GeologyamanyaNo ratings yet
- Et AlDocument14 pagesEt AljusselinoNo ratings yet
- Causes of EarthquakeDocument15 pagesCauses of EarthquakeAaron de GuzmanNo ratings yet
- Geodinamika TugasDocument6 pagesGeodinamika TugasAnonymous DjPgWNNo ratings yet
- EarthquakeDocument10 pagesEarthquakemuhammadumeryaqoob16No ratings yet
- Tibaldi 1995Document12 pagesTibaldi 1995Gonzalo MaragañoNo ratings yet
- How Earthquakes Impact Roads and BuildingsDocument9 pagesHow Earthquakes Impact Roads and BuildingsVivek SharmaNo ratings yet
- Embracing Catastrophic Plate TectonicsDocument4 pagesEmbracing Catastrophic Plate Tectonicseustoque2668No ratings yet
- EqTable FinalDocument45 pagesEqTable FinalThanh Bình HuỳnhNo ratings yet
- Lesson 2 Elements of SeismologyDocument8 pagesLesson 2 Elements of SeismologyJoshua John JulioNo ratings yet
- Plate Boundaries and Natural HazardsFrom EverandPlate Boundaries and Natural HazardsJoao C. DuarteNo ratings yet
- ASIO4ALL v2 Instruction ManualDocument11 pagesASIO4ALL v2 Instruction ManualDanny_Grafix_1728No ratings yet
- 3.5.1 Types of Earthquake-Induced Slope MovementDocument17 pages3.5.1 Types of Earthquake-Induced Slope MovementTojo RanaNo ratings yet
- 3.4 Liquefaction: Chapter ThreeDocument36 pages3.4 Liquefaction: Chapter ThreeTojo RanaNo ratings yet
- Geotechnical Earthquake Engineering Handbook: Robert W. DayDocument7 pagesGeotechnical Earthquake Engineering Handbook: Robert W. DayThaib RantepadangNo ratings yet
- Example of A Geotechnical Report Dealing With Earthquake EngineeringDocument6 pagesExample of A Geotechnical Report Dealing With Earthquake EngineeringTojo RanaNo ratings yet
- GEOTECHNIQUE Partie2Document13 pagesGEOTECHNIQUE Partie2Tojo RanaNo ratings yet
- Introduction To Earthquakes: P A R T 1Document26 pagesIntroduction To Earthquakes: P A R T 1Tojo RanaNo ratings yet
- IndexDocument11 pagesIndexTojo RanaNo ratings yet
- 1.1 Geotechnical Earthquake EngineeringDocument4 pages1.1 Geotechnical Earthquake EngineeringNguyen Trong HoNo ratings yet
- Introduction To Earthquakes: Preface AcknowledgmentsDocument6 pagesIntroduction To Earthquakes: Preface AcknowledgmentsteamgoodNo ratings yet
- PrefDocument1 pagePrefTojo RanaNo ratings yet
- AppFDocument11 pagesAppFTojo RanaNo ratings yet
- 13.4 Foundations For Single-Family Houses: Chapter ThirteenDocument8 pages13.4 Foundations For Single-Family Houses: Chapter ThirteenTojo RanaNo ratings yet
- AppCDocument1 pageAppCTojo RanaNo ratings yet
- Solution To Problems: Appendix EDocument78 pagesSolution To Problems: Appendix ETojo RanaNo ratings yet
- About LiquefactionDocument30 pagesAbout Liquefactionhassen27HNo ratings yet
- Example of A Geotechnical Report Dealing With Earthquake EngineeringDocument6 pagesExample of A Geotechnical Report Dealing With Earthquake EngineeringTojo RanaNo ratings yet
- AppCDocument1 pageAppCTojo RanaNo ratings yet
- 09aDocument31 pages09aTojo RanaNo ratings yet
- Building Codes: P A R T 4Document5 pagesBuilding Codes: P A R T 4Tojo RanaNo ratings yet
- Foundation Alternatives To Mitigate Earthquake Effects: 13.3.3 Prestressed Concrete PilesDocument16 pagesFoundation Alternatives To Mitigate Earthquake Effects: 13.3.3 Prestressed Concrete PilesTojo RanaNo ratings yet
- Eqsearch, Eqfault, and Frisksp Computer Programs: Appendix BDocument25 pagesEqsearch, Eqfault, and Frisksp Computer Programs: Appendix BTojo RanaNo ratings yet
- Foundation Alternatives To Mitigate Earthquake EffectsDocument17 pagesFoundation Alternatives To Mitigate Earthquake EffectsTojo RanaNo ratings yet
- 07Document27 pages07Tojo RanaNo ratings yet
- 12Document15 pages12scriptd_ozd3nNo ratings yet
- Geotechnical Earthquake Engineering Analyses: P A R T 2Document24 pagesGeotechnical Earthquake Engineering Analyses: P A R T 2Tojo RanaNo ratings yet
- Other Geotechnical Earthquake Engineering Analyses: Symbol A ADocument22 pagesOther Geotechnical Earthquake Engineering Analyses: Symbol A ATojo RanaNo ratings yet
- 3.5.1 Types of Earthquake-Induced Slope MovementDocument17 pages3.5.1 Types of Earthquake-Induced Slope MovementTojo RanaNo ratings yet
- 05bDocument18 pages05bTojo RanaNo ratings yet
- 3.4 Liquefaction: Chapter ThreeDocument36 pages3.4 Liquefaction: Chapter ThreeTojo RanaNo ratings yet