You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Ieee 1048Document49 pagesIeee 1048Jose Antonio EstofaneroNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- BrightSign Built-In ManualDocument18 pagesBrightSign Built-In ManualecdkNo ratings yet
- Tyco ADC NetworkDocument28 pagesTyco ADC NetworkraneensysNo ratings yet
- Eetop - CN - FAST FOURIER TRANSFORM PROCESSOR DESIGNDocument186 pagesEetop - CN - FAST FOURIER TRANSFORM PROCESSOR DESIGNCarlos CalderonNo ratings yet
- bt2505b Bluetooth PhilipsDocument2 pagesbt2505b Bluetooth Philipsgursharan singh GSGNo ratings yet
- Aup 2inchDocument1 pageAup 2inchIssouf TraoréNo ratings yet
- Size of Transformer's Circuit Braker & Fuse (10.6.13)Document31 pagesSize of Transformer's Circuit Braker & Fuse (10.6.13)arunpandey1686No ratings yet
- 1UDC CatalogueDocument6 pages1UDC CatalogueGamatronicNo ratings yet
- Mini DIN Rail Mounted EnclosureDocument2 pagesMini DIN Rail Mounted EnclosureCristian Román EscobedoNo ratings yet
- Solis 1 5k 2g Manual v2 2Document20 pagesSolis 1 5k 2g Manual v2 2Luz Mariel Serrano CastilloNo ratings yet
- Question Solving: Creative Design ECE-602Document14 pagesQuestion Solving: Creative Design ECE-602Mohan Krishna SuggunaNo ratings yet
- Line Follower Robot Project ReportDocument9 pagesLine Follower Robot Project ReportIqra ArainNo ratings yet
- Service Manual: Telephone Answering MachineDocument12 pagesService Manual: Telephone Answering MachineRuben MoralesNo ratings yet
- Beat 390Document11 pagesBeat 390post8713No ratings yet
- Data Sheets: ©2004 Littelfuse, Inc. Thyristor Product Catalog +1 972-580-7777Document76 pagesData Sheets: ©2004 Littelfuse, Inc. Thyristor Product Catalog +1 972-580-7777fadia.fayadhNo ratings yet
- DVD Receiver Owner'S Manual: Model: Ht902TbDocument27 pagesDVD Receiver Owner'S Manual: Model: Ht902TbJaijeev PaliNo ratings yet
- NSM80101MT1G NPN Transistor With Dual Series Switching DiodeDocument6 pagesNSM80101MT1G NPN Transistor With Dual Series Switching Diodeserrano.flia.coNo ratings yet
- DSL Overview 3 ComDocument17 pagesDSL Overview 3 ComAurelio Machado100% (1)
- Calculating RTU TransmissionDocument2 pagesCalculating RTU Transmissionceleritas81No ratings yet
- Chapter 1Document135 pagesChapter 1Murali ShettyNo ratings yet
- Atx and p4 Power SuppliesDocument6 pagesAtx and p4 Power SuppliesSantosh DevadeNo ratings yet
- Pflex Ap011 - Conexion Electrica Variadoes 40 525Document132 pagesPflex Ap011 - Conexion Electrica Variadoes 40 525CarlosOtinianoNo ratings yet
- SCG800 GuideDocument478 pagesSCG800 GuideSpirt AlexNo ratings yet
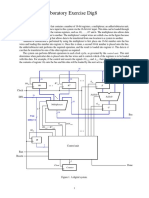
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDocument6 pagesLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaNo ratings yet
- S-Plane Bode Plots - Identifying Poles and Zeros in A Circuit Transfer FunctionDocument4 pagesS-Plane Bode Plots - Identifying Poles and Zeros in A Circuit Transfer FunctionTere BinNo ratings yet
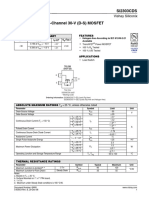
- Si2303CDS: Vishay SiliconixDocument10 pagesSi2303CDS: Vishay SiliconixAvs ElectronNo ratings yet
- 75u50 SsdiDocument3 pages75u50 SsdiArnold DuarteNo ratings yet
- UG Core CoursesDocument26 pagesUG Core Coursesraja viriyalaNo ratings yet
- Manual Festo CPX PSI USDocument2 pagesManual Festo CPX PSI USfranxcoisNo ratings yet
- WIHH - Halim PerdanakusumaDocument8 pagesWIHH - Halim PerdanakusumaLandy FebriansyahNo ratings yet