You might also like
- Image Processing of Sidescan SonarDocument7 pagesImage Processing of Sidescan SonarAlex NicksonNo ratings yet
- Stepper Motor SpcifiDocument2 pagesStepper Motor SpcifiAugustine MillerNo ratings yet
- What is a Servomotor? Components and Control with 555 TimerDocument6 pagesWhat is a Servomotor? Components and Control with 555 TimerSB SegobriNo ratings yet
- Stepper and Servo MotorDocument5 pagesStepper and Servo Motorகோகுல்நாத் ஸ்ரீ கிNo ratings yet
- Name: Faizan Bashir Reg No: F20604044 Submitted To: Sir Abdul Qadeer Date: 26/2/2023Document16 pagesName: Faizan Bashir Reg No: F20604044 Submitted To: Sir Abdul Qadeer Date: 26/2/2023safiullahadam353No ratings yet
- Servo Motor Control With Micropocessor 8051Document5 pagesServo Motor Control With Micropocessor 8051Nanda FerdanaNo ratings yet
- Stepper Motor: CO2: LO: Understand Construction and Operation Write The Control SequenceDocument25 pagesStepper Motor: CO2: LO: Understand Construction and Operation Write The Control SequenceAzeem .kNo ratings yet
- Wiki - DC Servomotor ControllerDocument11 pagesWiki - DC Servomotor Controllerm.mignecoNo ratings yet
- EE462 MATLAB SIMULATION OF INDUCTION MOTOR SPEED CONTROLDocument3 pagesEE462 MATLAB SIMULATION OF INDUCTION MOTOR SPEED CONTROLTerry rickyNo ratings yet
- Servo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SDocument27 pagesServo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SThameem AbbasNo ratings yet
- Motores A PasosDocument97 pagesMotores A PasosJonathan TerrónNo ratings yet
- PowerFlex® 7000 Medium Voltage AC DriveDocument350 pagesPowerFlex® 7000 Medium Voltage AC DriveAndrès G GENo ratings yet
- Circuit Stepper Motor DriverDocument17 pagesCircuit Stepper Motor DriverkalpicoNo ratings yet
- Lab Report G 15-1Document12 pagesLab Report G 15-1Suleiman Abubakar AuduNo ratings yet
- Servo Motor & D.C Motor Interfacing With Atmega32Document33 pagesServo Motor & D.C Motor Interfacing With Atmega32Yash TripathiNo ratings yet
- SEM 2 Marks With AnsDocument15 pagesSEM 2 Marks With AnsRevathy KannanNo ratings yet
- Chapter 5 Stepper MOTOR PracticalDocument16 pagesChapter 5 Stepper MOTOR PracticalmfmprofNo ratings yet
- Step 1: Let's Look at A Typical Motor: Stator Cooling FanDocument17 pagesStep 1: Let's Look at A Typical Motor: Stator Cooling FanrodrigomessiasNo ratings yet
- Stepper Motor Control Through RF LinkDocument12 pagesStepper Motor Control Through RF Linkmrx1061100% (1)
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Servo Tuning TutorialDocument38 pagesServo Tuning TutorialpranavNo ratings yet
- LAB 2-AngeladaDocument20 pagesLAB 2-AngeladaAlehamarie AngeladaNo ratings yet
- Ann TechDocument76 pagesAnn TechPidikiti Surendra BabuNo ratings yet
- Special Electrical Machines: Reluctance, Vernier & Stepping MotorsDocument5 pagesSpecial Electrical Machines: Reluctance, Vernier & Stepping MotorsEswaran0% (1)
- 1 Intro TQ10 02ADocument4 pages1 Intro TQ10 02AAamirJavedNo ratings yet
- Semester Project "Computer Numerical Controlled Machine": Ee332 Control Systems Lab - CNC MachineDocument19 pagesSemester Project "Computer Numerical Controlled Machine": Ee332 Control Systems Lab - CNC MachinezakiNo ratings yet
- An Extensive Look On Servo and Stepper MotorDocument12 pagesAn Extensive Look On Servo and Stepper MotorsajhfhfsjaNo ratings yet
- TecoDocument94 pagesTecoNgọc ÁnhNo ratings yet
- Serial Stepper ControllerDocument4 pagesSerial Stepper ControllerNguyễn HiểnNo ratings yet
- Operating Modes of Stepper MotorDocument6 pagesOperating Modes of Stepper MotorAdi AdnanNo ratings yet
- Stepper Motor Basics: Applicationnote001Document13 pagesStepper Motor Basics: Applicationnote001shark seas100% (1)
- Stpper MotorDocument18 pagesStpper Motors.jyotshna100% (1)
- Special - Electrical - Machines QBDocument25 pagesSpecial - Electrical - Machines QBVel MuruganNo ratings yet
- An001 enDocument13 pagesAn001 enQuynh NguyenNo ratings yet
- CNC Systems ServoDocument24 pagesCNC Systems Servocyanide_nfsNo ratings yet
- Bipolar Stepper Motor Driver 74194Document12 pagesBipolar Stepper Motor Driver 74194mekuannintmesfin100% (2)
- of BLDCDocument45 pagesof BLDCsmhbNo ratings yet
- BLDCDocument45 pagesBLDCthulasi_krishna75% (4)
- Proyecto de Mini Dron - Desarrollo Propio de Tecnologia - Sin ArduinoDocument22 pagesProyecto de Mini Dron - Desarrollo Propio de Tecnologia - Sin ArduinoHumberto AnguloNo ratings yet
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDocument63 pagesJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNo ratings yet
- Governor 200404Document9 pagesGovernor 200404Amor DavidNo ratings yet
- Driver M542m para NEMA 23Document8 pagesDriver M542m para NEMA 23Alexander Pulido MarínNo ratings yet
- UntitledDocument135 pagesUntitledcianeto liteNo ratings yet
- Servo Motor Controller or Servo Motor DriverDocument4 pagesServo Motor Controller or Servo Motor DriverBrahmanand SinghNo ratings yet
- PE 13 EnhDocument45 pagesPE 13 EnhSanthosh Kumar JNo ratings yet
- DC Motor Speed ControllerDocument22 pagesDC Motor Speed ControllerShafqt MbrkNo ratings yet
- SD Series Digital AC Servo System User Manual GuideDocument66 pagesSD Series Digital AC Servo System User Manual GuideAdnene SaanounNo ratings yet
- Application Guide For Pulse and Direction Stepper SystemsDocument14 pagesApplication Guide For Pulse and Direction Stepper Systemsfog900No ratings yet
- Unit III SPMDocument65 pagesUnit III SPMMukesh KatoleNo ratings yet
- FuzzyDocument68 pagesFuzzyPidikiti Surendra BabuNo ratings yet
- Eeeb371 Pic Exp6newDocument7 pagesEeeb371 Pic Exp6newSalemAbaad100% (2)
- Everything You Need To Know About Stepper MotorsDocument7 pagesEverything You Need To Know About Stepper MotorsAbhishekNo ratings yet
- Energy Savings with Variable Frequency DrivesDocument47 pagesEnergy Savings with Variable Frequency DrivesNiket MankadNo ratings yet
- EZZ023535Document35 pagesEZZ023535fr946ntyjgNo ratings yet
- Inv. FUJI, Frenic-MultiDocument39 pagesInv. FUJI, Frenic-MultiTandin IgorNo ratings yet
- Controlling Stepper Motor Via Arduino UnoDocument15 pagesControlling Stepper Motor Via Arduino UnoZahran TarekNo ratings yet
- A Meh392aDocument32 pagesA Meh392agsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Fossil Fired Programs: 350 - 450 MW RatingDocument16 pagesFossil Fired Programs: 350 - 450 MW Ratingmunendra_muni9896No ratings yet
- ONE NIGHT TOUR OF ISTANBULDocument2 pagesONE NIGHT TOUR OF ISTANBULmunendra_muni9896No ratings yet
- Pem Telephone List PDFDocument10 pagesPem Telephone List PDFmunendra_muni9896No ratings yet
- Improve Workforce Capability with People Capability Maturity Model (P-CMMDocument3 pagesImprove Workforce Capability with People Capability Maturity Model (P-CMMmunendra_muni9896No ratings yet
- CoalDocument17 pagesCoalAshutosh PandeyNo ratings yet
- Projects PDFDocument7 pagesProjects PDFmunendra_muni9896No ratings yet
- Bigbook Vocabulary BDocument26 pagesBigbook Vocabulary Bmunendra_muni9896No ratings yet
- LeaveDocument2 pagesLeavemunendra_muni9896No ratings yet
- Generator & Exciter BasicDocument8 pagesGenerator & Exciter Basictowfiqeee100% (1)
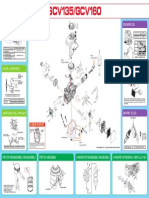
- GCV160 PDFDocument1 pageGCV160 PDFClejeanu MihaelaNo ratings yet
- SMD230A Datasheet En-GbDocument4 pagesSMD230A Datasheet En-GbPaulo RochaNo ratings yet
- DSH 900-16 SchematicDocument20 pagesDSH 900-16 SchematicJose SanchezNo ratings yet
- C11-C13-C15-C18 - Troubleshooting - 4310213 - 01Document4 pagesC11-C13-C15-C18 - Troubleshooting - 4310213 - 01amr salahNo ratings yet
- ELCB ExperimentDocument4 pagesELCB ExperimentShubham Singh RathoreNo ratings yet
- Four Stroke PWC Service ManualDocument241 pagesFour Stroke PWC Service ManualJisu Kim100% (1)
- Advance Engine Timing with STCDocument28 pagesAdvance Engine Timing with STCLuisPupiales100% (1)
- Seal Kit Instruction Sheet: Subject: InstructionsDocument1 pageSeal Kit Instruction Sheet: Subject: InstructionsMarco GonzalezNo ratings yet
- Electrical system sensors descriptionDocument1 pageElectrical system sensors descriptionuser1No ratings yet
- CUMMINS QSX15 Engine - Parts Catalog 79007291 55Document1 pageCUMMINS QSX15 Engine - Parts Catalog 79007291 55Bernard ApuritNo ratings yet
- Hydrostatic Circuitry (S - N 501915001 & Above) - 743Document4 pagesHydrostatic Circuitry (S - N 501915001 & Above) - 743Thierry VoisinNo ratings yet
- Diagnostic Fault Codes For Cummins EnginesDocument26 pagesDiagnostic Fault Codes For Cummins Enginesartmehr100% (12)
- Spec Engine 3516Document5 pagesSpec Engine 3516Jusril HidayatNo ratings yet
- Development of Steer-By-Wire Control System For GM "Sequel"Document15 pagesDevelopment of Steer-By-Wire Control System For GM "Sequel"angelo158No ratings yet
- Preventive Maintenance ChecklistDocument3 pagesPreventive Maintenance ChecklistYayan Apriyanto100% (1)
- MCC 1Document14 pagesMCC 1Arif SugestyanNo ratings yet
- STEER AXLE WORKSHOP MANUALDocument253 pagesSTEER AXLE WORKSHOP MANUALMiha Anghel78% (27)
- Unit I: Drive CharecteristicsDocument72 pagesUnit I: Drive CharecteristicscvkcvkNo ratings yet
- Durst Laborator 138 Service Instructions PDFDocument39 pagesDurst Laborator 138 Service Instructions PDFPaulo CabritaNo ratings yet
- Crowder CatalogDocument120 pagesCrowder CatalogVILLIK PNo ratings yet
- Cooling SystemDocument16 pagesCooling SystemWagner BernardinaNo ratings yet
- 1996-2001 Fuso - BrakeDocument201 pages1996-2001 Fuso - BrakeEliecer Bayona100% (1)
- Dcam PT 66 Training Module 15.21 Eng Monitoring and Ground OpnDocument118 pagesDcam PT 66 Training Module 15.21 Eng Monitoring and Ground OpnSThaneasMurNo ratings yet
- Non Return ValveDocument1 pageNon Return Valvemekhman mekhtyNo ratings yet
- Lista Precios 2010 MARESADocument83 pagesLista Precios 2010 MARESAOsun Deji LanaNo ratings yet
- Hydraulic Rock Drill Hexi: AND ANDDocument7 pagesHydraulic Rock Drill Hexi: AND ANDStgo TurcoNo ratings yet
- Series 10 - Fixed Cone Valve 2013Document10 pagesSeries 10 - Fixed Cone Valve 2013nunezalbertoNo ratings yet
- Alternator (Automotive)Document4 pagesAlternator (Automotive)Cornel BicaNo ratings yet
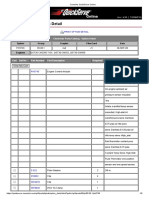
- Parts Catalog - Option DetailDocument3 pagesParts Catalog - Option DetailmunhNo ratings yet
- T9.390, T9.450, T9.505, T9.560, T9.615, T9.670 Tractor PIN ZCF200001 and Above - PIN ZDF200001 and A - 47488219-Linked PDFDocument4,015 pagesT9.390, T9.450, T9.505, T9.560, T9.615, T9.670 Tractor PIN ZCF200001 and Above - PIN ZDF200001 and A - 47488219-Linked PDFIsaac Galvez Escudero50% (2)