You might also like
- Solution To Phys 202Document2 pagesSolution To Phys 202Duong Quoc DatNo ratings yet
- Homework Phys 101 Gmu SolutionDocument3 pagesHomework Phys 101 Gmu SolutionDuong Quoc DatNo ratings yet
- Harmonic Trap Boses GasDocument4 pagesHarmonic Trap Boses GasDuong Quoc DatNo ratings yet
- Prob 02Document1 pageProb 02Duong Quoc DatNo ratings yet
- Lecture 1 in Particle PhysicsDocument13 pagesLecture 1 in Particle PhysicsDuong Quoc DatNo ratings yet
- Graduate Student HandbookDocument17 pagesGraduate Student HandbookDuong Quoc DatNo ratings yet
- System Map WRT 11Document1 pageSystem Map WRT 11Duong Quoc DatNo ratings yet
- 01 Laplace Equation Cartesian CoordsDocument10 pages01 Laplace Equation Cartesian CoordsDuong Quoc DatNo ratings yet
- Uva Particle HiggsDocument4 pagesUva Particle HiggsDuong Quoc DatNo ratings yet
- Physics 7410 Homework 4Document2 pagesPhysics 7410 Homework 4Duong Quoc DatNo ratings yet
- Dimensional Analysis ArticleDocument0 pagesDimensional Analysis ArticleDuong Quoc DatNo ratings yet
- System Map WRT 11Document1 pageSystem Map WRT 11Duong Quoc DatNo ratings yet
- Numerical PhysicsDocument4 pagesNumerical PhysicsDuong Quoc DatNo ratings yet
- Diffraction of Electrons in A Polycsrytalline Lattice (Debye-Scherrer Diffraction)Document4 pagesDiffraction of Electrons in A Polycsrytalline Lattice (Debye-Scherrer Diffraction)Duong Quoc DatNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dod EngDocument2 pagesDod Engvk4415003No ratings yet
- CEFIC Guidelines Transport Equipment Packed Cargo (2010)Document7 pagesCEFIC Guidelines Transport Equipment Packed Cargo (2010)sl1828No ratings yet
- F588 PDFDocument8 pagesF588 PDFOscar Gutiérrez-JuncoNo ratings yet
- Perioperative HypothermiaDocument4 pagesPerioperative Hypothermiasri utari masyitahNo ratings yet
- Metric Heavy Hex Nuts: ASME B18.2.4.6M-2010Document16 pagesMetric Heavy Hex Nuts: ASME B18.2.4.6M-2010CarlitosNo ratings yet
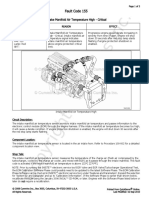
- Fault Code 155: Intake Manifold Air Temperature High - CriticalDocument3 pagesFault Code 155: Intake Manifold Air Temperature High - Criticalhamilton miranda100% (1)
- Synopsis THESIS 2022: Aiswarya Vs Tqarebc005 S10Document5 pagesSynopsis THESIS 2022: Aiswarya Vs Tqarebc005 S10Asna DTNo ratings yet
- Ch1 PDFDocument54 pagesCh1 PDFChristian Jegues100% (2)
- PDPM Iiitdm Jabalpur: LASER Beam Machining AdvancementsDocument12 pagesPDPM Iiitdm Jabalpur: LASER Beam Machining AdvancementsDeva RajNo ratings yet
- Kelas 1 AlphabetTITLE Kelas 1 Numbers ConversationTITLE Kelas 2 Feelings Body PartsDocument54 pagesKelas 1 AlphabetTITLE Kelas 1 Numbers ConversationTITLE Kelas 2 Feelings Body PartsArti Hikmatullah Perbawana Sakti BuanaNo ratings yet
- Dental Radiographs and Photographs in Human Forensic IdentificationDocument8 pagesDental Radiographs and Photographs in Human Forensic IdentificationBudi PurnomoNo ratings yet
- Service Manual: EQ1030T47D-820 Light Commercial TruckDocument175 pagesService Manual: EQ1030T47D-820 Light Commercial TruckYonny ColqueNo ratings yet
- Limbah PabrikDocument2 pagesLimbah Pabrikindar dewaNo ratings yet
- Passive Filter vs. Active Filter: DefinitionsDocument3 pagesPassive Filter vs. Active Filter: DefinitionsAmit DebnathNo ratings yet
- Datasheet De14h (II) HC 1500v May2019 NTDocument2 pagesDatasheet De14h (II) HC 1500v May2019 NTkrishnakumar paamireddyNo ratings yet
- CORRELATION AND LINEAR REGRESSIONDocument9 pagesCORRELATION AND LINEAR REGRESSIONSANKET GANDHINo ratings yet
- 3 Edition February 2013: Ec2 Guide For Reinforced Concrete Design For Test and Final ExaminationDocument41 pages3 Edition February 2013: Ec2 Guide For Reinforced Concrete Design For Test and Final ExaminationDark StingyNo ratings yet
- Soal ReadingDocument3 pagesSoal ReadingSendi PuspaNo ratings yet
- Mathematics: Minimum Level Learning MaterialDocument60 pagesMathematics: Minimum Level Learning MaterialTusar SardarNo ratings yet
- SAFETY AND LOSS PREVENTION FOR CHEMICAL PROCESS FACILITIESDocument13 pagesSAFETY AND LOSS PREVENTION FOR CHEMICAL PROCESS FACILITIESKinosraj KumaranNo ratings yet
- CIVL-365 Tutorial 8 SolutionDocument3 pagesCIVL-365 Tutorial 8 SolutionIvsNo ratings yet
- Fe in Black TeaDocument6 pagesFe in Black TeaHerni Nur AeniNo ratings yet
- M. Valerio Assignment 6.1Document1 pageM. Valerio Assignment 6.1Mark Kristian ValerioNo ratings yet
- Consumer preference towards branded milk: A comparative analysis of Verka milk and Amul milkDocument12 pagesConsumer preference towards branded milk: A comparative analysis of Verka milk and Amul milkBhawna RehanNo ratings yet
- Applied Acoustics: André M.N. Spillere, Augusto A. Medeiros, Julio A. CordioliDocument13 pagesApplied Acoustics: André M.N. Spillere, Augusto A. Medeiros, Julio A. CordioliAbdelali MoumenNo ratings yet
- Pick The Gender of Your Baby - Free EditionDocument26 pagesPick The Gender of Your Baby - Free EditionAlicia Adrianti0% (1)
- The Karnataka Maternity Benefit (Amendment) Rules 2019Document30 pagesThe Karnataka Maternity Benefit (Amendment) Rules 2019Manisha SNo ratings yet
- ASME B31.4-2016 Pipeline Transportation Systems For Liquids and SlurriesDocument1 pageASME B31.4-2016 Pipeline Transportation Systems For Liquids and SlurriesJose Rodrigo Salguero DuranNo ratings yet
- GreyFox Intercom Install GuideDocument12 pagesGreyFox Intercom Install GuideAbdallah HashemNo ratings yet
- Lab Journal 4 14032023 104921amDocument8 pagesLab Journal 4 14032023 104921amHammad MashwaniNo ratings yet