You might also like
- Marlin Ch13Document44 pagesMarlin Ch13Ashwin Kumar SabatNo ratings yet
- 5.2.1 Manufactura Integrada Por ComputadoraDocument10 pages5.2.1 Manufactura Integrada Por ComputadoraMartín MirelesNo ratings yet
- Ench 617 Notes I (2021)Document20 pagesEnch 617 Notes I (2021)Mohan kumar0% (1)
- Keep Advanced Control Systems OnlineDocument29 pagesKeep Advanced Control Systems OnlineBisto MasiloNo ratings yet
- Loop Checking A Technicians GuideDocument24 pagesLoop Checking A Technicians GuideJ Mohamed UvaisNo ratings yet
- Process Control: A Practical Approach: © 2011 John Wiley & Sons Ltd. ISBN: 978-0-470-97587-9Document2 pagesProcess Control: A Practical Approach: © 2011 John Wiley & Sons Ltd. ISBN: 978-0-470-97587-9Trường Đỗ ThếNo ratings yet
- Process Engineers: Take Control!: Rocess OntrolDocument11 pagesProcess Engineers: Take Control!: Rocess OntrolJennifer PiragautaNo ratings yet
- Industrial Automation and Control Technology Management: Level-VDocument22 pagesIndustrial Automation and Control Technology Management: Level-Vfrezer mesfinNo ratings yet
- 5 6325398082863237450Document68 pages5 6325398082863237450DishaNo ratings yet
- FUNCTIONS OF TECHNOLOGY MANAGEMENT - ControllingDocument44 pagesFUNCTIONS OF TECHNOLOGY MANAGEMENT - ControllingRuzel AmpoanNo ratings yet
- A Introduction To Advanced Process ControlDocument5 pagesA Introduction To Advanced Process Controlsandeep lal100% (1)
- 6 Steps To Designing A Flexible Control System With ISADocument4 pages6 Steps To Designing A Flexible Control System With ISAEduardo BlancoNo ratings yet
- Industry Automation and Drive Technologies Training ManualDocument36 pagesIndustry Automation and Drive Technologies Training ManualPop-Coman SimionNo ratings yet
- PL-05 Chapter04 Rev3Document38 pagesPL-05 Chapter04 Rev3kevin ArandiaNo ratings yet
- Chapter Overview: 2: Modeling BasicsDocument84 pagesChapter Overview: 2: Modeling BasicsGigiNo ratings yet
- Overview of Undergraduate Control PDFDocument48 pagesOverview of Undergraduate Control PDFboban_mikicNo ratings yet
- Improve manufacturing performance through loop checkingDocument8 pagesImprove manufacturing performance through loop checkingOhaneje Uzoma67% (3)
- 1 Process Dynamics and Control No1Document32 pages1 Process Dynamics and Control No1Ayushi100% (1)
- Editorial Choosing Advanced ControlDocument9 pagesEditorial Choosing Advanced ControlMohd HamedNo ratings yet
- Understand Advanced Process Control: Back To BasicsDocument4 pagesUnderstand Advanced Process Control: Back To BasicsJohn AnthoniNo ratings yet
- AnswersDocument5 pagesAnswersShaik RoshanNo ratings yet
- Sistema de Control 2Document98 pagesSistema de Control 2Esteban CastellanoNo ratings yet
- Basic TheoryDocument5 pagesBasic TheoryzakiNo ratings yet
- Basic Control Concepts Unit2Document10 pagesBasic Control Concepts Unit2Noyon NoyonNo ratings yet
- ControlDocument43 pagesControlaramNo ratings yet
- Computer SystemDocument4 pagesComputer SystemJorge GutierrezNo ratings yet
- Introduction to Process Control Dynamics and SystemsDocument16 pagesIntroduction to Process Control Dynamics and SystemsByron MawoyoNo ratings yet
- PROCESS CONTROL STRATEGIESDocument11 pagesPROCESS CONTROL STRATEGIESRapee Puaksungnoen100% (1)
- DdadaedDocument2 pagesDdadaedShuraihilqadhi KasuleNo ratings yet
- Fundamentals of Process Control Theory ThirdEd - Murrill - Unit2Document10 pagesFundamentals of Process Control Theory ThirdEd - Murrill - Unit2Ganesh GanyNo ratings yet
- Increasing Customer Value of Industrial Control Performance Monitoring-Honeywell's ExperienceDocument21 pagesIncreasing Customer Value of Industrial Control Performance Monitoring-Honeywell's ExperienceJake Berryman TannebergerNo ratings yet
- Automatic Control SystemsDocument3 pagesAutomatic Control SystemsIffatNo ratings yet
- Chapter - 6: Instrumentation & Process Control in The ProcessDocument10 pagesChapter - 6: Instrumentation & Process Control in The ProcessgauriNo ratings yet
- Design Aspects of Control SystemDocument3 pagesDesign Aspects of Control Systemmekeilah romaNo ratings yet
- College of Engineering Education Matina, Davao CityDocument8 pagesCollege of Engineering Education Matina, Davao CityGrazel MDNo ratings yet
- Plantwide Control-A Review and A New Design Procedure: Challenge ProcessDocument32 pagesPlantwide Control-A Review and A New Design Procedure: Challenge Processhamidrezaee008No ratings yet
- HP - 09.10 - Practical Process Control System MetricsDocument3 pagesHP - 09.10 - Practical Process Control System MetricsUzma Abdul RaufNo ratings yet
- Bid Management ProcessDocument0 pagesBid Management Processcoyote41No ratings yet
- Experiment 12 Instrumentation and Control LabDocument17 pagesExperiment 12 Instrumentation and Control LabAyesha KhurramNo ratings yet
- Ha - Case Study - G13 - Batch3Document49 pagesHa - Case Study - G13 - Batch3Sanika TalathiNo ratings yet
- Relevance of Actions and Measurements in Control PerformancesDocument7 pagesRelevance of Actions and Measurements in Control PerformancesLucas DuarteNo ratings yet
- Engineering Manufacturing Control Systems Using PROSA and Delegate MASDocument29 pagesEngineering Manufacturing Control Systems Using PROSA and Delegate MASkhairrajNo ratings yet
- Online Quality Management SystemDocument9 pagesOnline Quality Management Systemselinasimpson361No ratings yet
- Process Control Fundamentals: Revision Date: January 2020Document202 pagesProcess Control Fundamentals: Revision Date: January 2020DidiNo ratings yet
- A Unified Framework For Pull Control Mechanisms in Multi-Stage Manufacturing SystemsDocument31 pagesA Unified Framework For Pull Control Mechanisms in Multi-Stage Manufacturing SystemsqrminstituteplNo ratings yet
- MM UNIT 3b 2021Document78 pagesMM UNIT 3b 2021Mr. S. Paul JoshuaNo ratings yet
- Automation in Manufacturing: February 1997Document9 pagesAutomation in Manufacturing: February 1997anujNo ratings yet
- Fundamentals of Automatic Control SystemsDocument11 pagesFundamentals of Automatic Control SystemsLouie CamposNo ratings yet
- Chemical Enginineering Fourth YearDocument68 pagesChemical Enginineering Fourth YearHabib NuredinNo ratings yet
- White Paper Lambda Tuning As A Promising Controller Tuning Method For Refinery Pss en 67720Document10 pagesWhite Paper Lambda Tuning As A Promising Controller Tuning Method For Refinery Pss en 67720Anish ShahNo ratings yet
- Process Control Lab AssignmentDocument3 pagesProcess Control Lab AssignmentJessica De GuzmanNo ratings yet
- What Is A Validation Master PlanDocument8 pagesWhat Is A Validation Master PlanNate RomanNo ratings yet
- Steve Doty, Pe, CemDocument2 pagesSteve Doty, Pe, CemzulfikartukuboyaNo ratings yet
- Yokogawa PID Tuning Guide - CsTunerDocument28 pagesYokogawa PID Tuning Guide - CsTunerZohaib Alam100% (2)
- 27.ijaest Vol No 8 Issue No 2 DC Motor Control Using Fuzzy Logic Controller 291 296Document6 pages27.ijaest Vol No 8 Issue No 2 DC Motor Control Using Fuzzy Logic Controller 291 296Vikas PatelNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Nature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsFrom EverandNature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsNo ratings yet
- Carriage of Goods by SeaDocument499 pagesCarriage of Goods by Seasiamak00195% (21)
- Derivation of Equations For Installed Valve Characteristics: AppendixDocument5 pagesDerivation of Equations For Installed Valve Characteristics: Appendixsiamak001No ratings yet
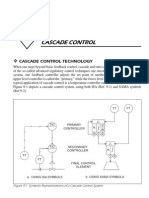
- Basic and Advanced Regulatory Control - System Design and Application (2nd Edition)Document4 pagesBasic and Advanced Regulatory Control - System Design and Application (2nd Edition)siamak001No ratings yet
- Preface: Wade04.book Page Xiii Thursday, April 15, 2004 12:20 PMDocument3 pagesPreface: Wade04.book Page Xiii Thursday, April 15, 2004 12:20 PMMowaten MasryNo ratings yet
- 1815 16 PDFDocument17 pages1815 16 PDFsiamak001No ratings yet
- 1815 10 PDFDocument11 pages1815 10 PDFsiamak001No ratings yet
- 1815 Appa PDFDocument5 pages1815 Appa PDFsiamak001No ratings yet
- 365 Index Term LinksDocument23 pages365 Index Term Linkssiamak001No ratings yet
- Dead-Time Compensation and Model-Based Control: Wade04.book Page 291 Thursday, April 15, 2004 12:20 PMDocument20 pagesDead-Time Compensation and Model-Based Control: Wade04.book Page 291 Thursday, April 15, 2004 12:20 PMsiamak001No ratings yet
- 1815 09Document14 pages1815 09Guadalupe EMNo ratings yet
- Basic and Advanced Regulatory Control:: System Design and ApplicationDocument4 pagesBasic and Advanced Regulatory Control:: System Design and Applicationsiamak001No ratings yet
- 1815 13 PDFDocument24 pages1815 13 PDFsiamak001No ratings yet
- 1815 12 PDFDocument21 pages1815 12 PDFUmar IftikharNo ratings yet
- Multivariable Model Predictive Control: Real-World ProblemsDocument24 pagesMultivariable Model Predictive Control: Real-World Problemssiamak001No ratings yet
- 1815 11 PDFDocument32 pages1815 11 PDFsiamak001No ratings yet
- Advanced Regulatory ControlDocument22 pagesAdvanced Regulatory ControlRuan Henrique ColomboNo ratings yet
- 1815 06Document54 pages1815 06farshidianNo ratings yet
- 1815 08 PDFDocument4 pages1815 08 PDFsiamak001No ratings yet
- Guide For Scientific Paper WritingDocument7 pagesGuide For Scientific Paper WritingReza TeflissiNo ratings yet
- Modifications To Standard Pid Control: 1 de M K e Edt T T DTDocument40 pagesModifications To Standard Pid Control: 1 de M K e Edt T T DTsiamak001No ratings yet
- 1815 07 PDFDocument9 pages1815 07 PDFsiamak001No ratings yet
- Grow your career at BATDocument2 pagesGrow your career at BATsiamak001No ratings yet
- 1815 04 PDFDocument21 pages1815 04 PDFsiamak001No ratings yet
- 1815 03 PDFDocument29 pages1815 03 PDFsiamak001No ratings yet
- Children's Film in The Digital Age - Essays On Audience, Adaptation and Consumer Culture (PDFDrive)Document211 pagesChildren's Film in The Digital Age - Essays On Audience, Adaptation and Consumer Culture (PDFDrive)Basia KowalskaNo ratings yet
- Ms Word McqsDocument12 pagesMs Word McqsUraiBa AnsaRi0% (1)
- Vspa 50Document5 pagesVspa 50elfo111No ratings yet
- DS 1Document23 pagesDS 1aayush bhatiaNo ratings yet
- Introduction to SONET and DWDM Digital Transmission StandardsDocument35 pagesIntroduction to SONET and DWDM Digital Transmission StandardsOmar Ayoub100% (1)
- Types of EvidenceDocument13 pagesTypes of EvidenceSteven Jan Sab-itNo ratings yet
- Frequently Asked Questions (Faq) FOR New Unifi Mobile Prepaid #BebasDocument1 pageFrequently Asked Questions (Faq) FOR New Unifi Mobile Prepaid #BebasNgHanSeongNo ratings yet
- SBC For Toll PlazaDocument6 pagesSBC For Toll PlazaruchitaNo ratings yet
- Cognitive TheoryDocument18 pagesCognitive TheoryshaelynNo ratings yet
- DLTSoul DrinkersDocument7 pagesDLTSoul DrinkersIgnacio Burón García100% (1)
- Hemera Creality CR10s Pro Upgrade Guide (Edition 1)Document24 pagesHemera Creality CR10s Pro Upgrade Guide (Edition 1)gumushNo ratings yet
- Positive Role The Indian Youth Can Play in PoliticsDocument2 pagesPositive Role The Indian Youth Can Play in PoliticsArul ChamariaNo ratings yet
- Stakeholder RegisterDocument7 pagesStakeholder Registerrouzbehk6515No ratings yet
- From Self Disorders To The Schizophrenic Self: Riccardo Piero Dalle LucheDocument31 pagesFrom Self Disorders To The Schizophrenic Self: Riccardo Piero Dalle LucheMichel de NostredameNo ratings yet
- Radiation Safety Officers Handbook A PDFDocument100 pagesRadiation Safety Officers Handbook A PDFAlejandro Zubiate100% (1)
- Johnson RPM Chart Evinrude E-Tec RPM Chart Mercury 4-Stroke RPM ChartDocument2 pagesJohnson RPM Chart Evinrude E-Tec RPM Chart Mercury 4-Stroke RPM ChartUlf NymanNo ratings yet
- Free Study PDF Download from pebexam BlogDocument22 pagesFree Study PDF Download from pebexam Blogk_jaiswalNo ratings yet
- ADocument3 pagesAcristinandreeamNo ratings yet
- Beck Thinking and Depression Idiosyncratic Content and Cognitive DistortionsDocument10 pagesBeck Thinking and Depression Idiosyncratic Content and Cognitive DistortionsFrancisco GaravagliaNo ratings yet
- Investment Banking Interview Strengths and Weaknesses PDFDocument15 pagesInvestment Banking Interview Strengths and Weaknesses PDFkamrulNo ratings yet
- Apu White SmokeDocument3 pagesApu White SmokeGoutam SahaNo ratings yet
- Nervous System Reaction PaperDocument3 pagesNervous System Reaction PaperJohn Ruel Sanchez IINo ratings yet
- Holt MCD Earth Science Chapter 30Document34 pagesHolt MCD Earth Science Chapter 30ADEDAMOPE ODUESONo ratings yet
- Spiros Styliaras: Devops EngineerDocument2 pagesSpiros Styliaras: Devops EngineerΣπύρος ΣτυλιαράςNo ratings yet
- TW Ycm01265958803Document62 pagesTW Ycm0126595880313239563No ratings yet
- Niche PartitioningDocument3 pagesNiche PartitioningKhang LqNo ratings yet
- Midterm Exam: Cecor2 - Hydraulics and Geotechnical EngineeringDocument2 pagesMidterm Exam: Cecor2 - Hydraulics and Geotechnical EngineeringEjay EmpleoNo ratings yet
- Significant Ships 1993Document101 pagesSignificant Ships 1993Joe TahirNo ratings yet
- TCXD 46-1984 / Lightning Protection For Buildings - Standard For Design and ConstructionDocument30 pagesTCXD 46-1984 / Lightning Protection For Buildings - Standard For Design and ConstructiontrungjindoNo ratings yet
- SAP MM Purchase Info Record GuideDocument3 pagesSAP MM Purchase Info Record GuidevikneshNo ratings yet