You might also like
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- Lectures 13-14Document23 pagesLectures 13-14vishnu reddyNo ratings yet
- Classical Control System Design: Dutch Institute of Systems and ControlDocument49 pagesClassical Control System Design: Dutch Institute of Systems and Controlजनार्धनाचारि केल्लाNo ratings yet
- Ae Lab ManualDocument52 pagesAe Lab ManualaryakalekattuNo ratings yet
- Lecture - 6: Transient ResponseDocument19 pagesLecture - 6: Transient ResponseSakib RushdiNo ratings yet
- Time Response AnalysisDocument151 pagesTime Response AnalysisTushar GuptaNo ratings yet
- Transient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or CosDocument38 pagesTransient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or Cosomar9aNo ratings yet
- Lecture6 PDFDocument8 pagesLecture6 PDFEdutamNo ratings yet
- Ee6403 DTSP123Document12 pagesEe6403 DTSP123VijayNo ratings yet
- DSP Lab Manual Final Presidency UniversityDocument58 pagesDSP Lab Manual Final Presidency UniversitySUNIL KUMAR0% (1)
- Transient & Steady State Response AnalysisDocument46 pagesTransient & Steady State Response AnalysisSwati AgarwalNo ratings yet
- G S D(S) N S D S N S D S: EC5: Control SystemsDocument7 pagesG S D(S) N S D S N S D S: EC5: Control SystemsMANOJ KUMAR DASNo ratings yet
- Lab # 6 Time Response AnalysisDocument10 pagesLab # 6 Time Response AnalysisFahad AneebNo ratings yet
- Lesson 2.0 DFTDocument42 pagesLesson 2.0 DFTKrishna Ram BudhathokiNo ratings yet
- DSP Lab Report-2 by L Govind EcDocument13 pagesDSP Lab Report-2 by L Govind EcGovind ReddyNo ratings yet
- 1 Lab Manual-Final-Control-System-1Document35 pages1 Lab Manual-Final-Control-System-1Shimalis RetaNo ratings yet
- I. Concepts and Tools: Mathematics For Dynamic SystemsDocument48 pagesI. Concepts and Tools: Mathematics For Dynamic SystemsRaveendhra IitrNo ratings yet
- AME455 - Midterm Exam 02 - 03/11/11Document7 pagesAME455 - Midterm Exam 02 - 03/11/11Cam VintatNo ratings yet
- Time & Frequency Response of The System Using MATLAB: SoftwareDocument9 pagesTime & Frequency Response of The System Using MATLAB: SoftwareVenkatesh KumarNo ratings yet
- System Design 10 - Time Domain AnalysisDocument14 pagesSystem Design 10 - Time Domain AnalysisSanjay RaajNo ratings yet
- Transform Analysis of Linear Time-Invariant Systems: P P P P PDocument16 pagesTransform Analysis of Linear Time-Invariant Systems: P P P P PreneeshczNo ratings yet
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument157 pagesControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- Lecture 4Document7 pagesLecture 4akhbar elyoum academyNo ratings yet
- Module 4: Time Response of Discrete Time Systems: Lecture Note 1Document5 pagesModule 4: Time Response of Discrete Time Systems: Lecture Note 1nirmal_inbox100% (1)
- Lab8-Lab9 Laplace SignalDocument19 pagesLab8-Lab9 Laplace Signaltayyaba hussainNo ratings yet
- Fundamental Control Theory: DR K. KouramasDocument22 pagesFundamental Control Theory: DR K. KouramasAbdel RahmanNo ratings yet
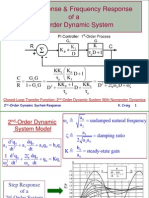
- Second-Order Dynamic Systems KCC 2011Document39 pagesSecond-Order Dynamic Systems KCC 2011Naguib NurNo ratings yet
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDocument12 pagesExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNo ratings yet
- Matching Responses With The Standard 2nd Order SystemDocument2 pagesMatching Responses With The Standard 2nd Order SystemcataiceNo ratings yet
- Tutorial 4Document23 pagesTutorial 4呀HongNo ratings yet
- EE 312 Lecture 5Document7 pagesEE 312 Lecture 5دكتور كونوهاNo ratings yet
- Lecture 4 First Order Systems: AME 455 Control Systems DesignDocument22 pagesLecture 4 First Order Systems: AME 455 Control Systems DesignJason ChiangNo ratings yet
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزNo ratings yet
- Feedback Control: Massachusetts Institute of Technology Subject 2.017Document12 pagesFeedback Control: Massachusetts Institute of Technology Subject 2.017Dr. Ir. R. Didin Kusdian, MT.No ratings yet
- Control System Manual 1 To 5Document23 pagesControl System Manual 1 To 5Eashan PendseNo ratings yet
- Time Domain Analysis of 2nd Order SystemDocument57 pagesTime Domain Analysis of 2nd Order SystemNicholas NelsonNo ratings yet
- All Ss 5 - AssignDocument30 pagesAll Ss 5 - AssignBruce ArnoldNo ratings yet
- The Time Theory Analysis and MATLAB Simulation of Control SystemDocument7 pagesThe Time Theory Analysis and MATLAB Simulation of Control SystemÄy MênNo ratings yet
- U2 Bode PlotDocument41 pagesU2 Bode PlotThalía LuceroNo ratings yet
- Experiment 1 (A)Document10 pagesExperiment 1 (A)Raghav GuptaNo ratings yet
- Time Domain Analysis (Introduction and First Order System)Document9 pagesTime Domain Analysis (Introduction and First Order System)جلال عواد كاظم جودةNo ratings yet
- Feedback Control System CharacteristicsDocument17 pagesFeedback Control System Characteristicsunnvishnu100% (1)
- Lecture 8 - Specification and Limitations: K. J. ÅströmDocument12 pagesLecture 8 - Specification and Limitations: K. J. ÅströmEdutamNo ratings yet
- Effect of Noise in Analog Communication SystemsDocument64 pagesEffect of Noise in Analog Communication SystemsAnet Augustin100% (1)
- CDS 101, Lecture 9.2 R. M. Murray, CaltechDocument7 pagesCDS 101, Lecture 9.2 R. M. Murray, Caltechtidjani86No ratings yet
- 26 Control Engineering LAbDocument50 pages26 Control Engineering LAbEashan PendseNo ratings yet
- Control System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKDocument18 pagesControl System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKKiranKumarNo ratings yet
- 1 1 ElectronicsDocument18 pages1 1 Electronics정재훈No ratings yet
- FIR Filters DesignDocument4 pagesFIR Filters DesignApricot BlueberryNo ratings yet
- L5 To 7 Transient and Steady State ResponseDocument53 pagesL5 To 7 Transient and Steady State ResponseRaj PatelNo ratings yet
- 45 37295 Ee311 2013 1 1 1 Ee311Document11 pages45 37295 Ee311 2013 1 1 1 Ee311Osama AhmedNo ratings yet
- ControllerDocument2 pagesControllerGiri KandeNo ratings yet
- Control System Fundamental: Time Response AnalysisDocument77 pagesControl System Fundamental: Time Response Analysisoneisa92100% (1)
- Department of Electromechanical Engineering Course Title: Control SystemDocument25 pagesDepartment of Electromechanical Engineering Course Title: Control SystemYidersal MarewNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument15 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- 1 Transient (Step) Response Specifications For Underdamped Second Order SystemsDocument6 pages1 Transient (Step) Response Specifications For Underdamped Second Order Systemsمحيي الدين الكميشىNo ratings yet
- Experiment 1Document5 pagesExperiment 1HarshaPuttaguntaNo ratings yet
- CHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)Document64 pagesCHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)kriti madhokNo ratings yet
- RARE Manual For Training Local Nature GuidesDocument91 pagesRARE Manual For Training Local Nature GuidesenoshaugustineNo ratings yet
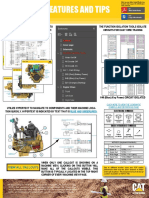
- View All Callouts: Function Isolation ToolsDocument29 pagesView All Callouts: Function Isolation Toolsمهدي شقرونNo ratings yet
- I M Com QT Final On16march2016Document166 pagesI M Com QT Final On16march2016Khandaker Sakib Farhad0% (1)
- Arithmetic QuestionsDocument2 pagesArithmetic QuestionsAmir KhanNo ratings yet
- Dutch Iris Eng 9734 HappyPattyCrochetDocument68 pagesDutch Iris Eng 9734 HappyPattyCrochetFrancisca Rico100% (6)
- Derma Notes 22pages. DR - Vishwa Medical CoachingDocument23 pagesDerma Notes 22pages. DR - Vishwa Medical CoachingΝίκος ΣυρίγοςNo ratings yet
- Data MiningDocument28 pagesData MiningGURUPADA PATINo ratings yet
- Conducting Focus GroupsDocument4 pagesConducting Focus GroupsOxfam100% (1)
- Theorising Mobility Justice-Mimi ShellerDocument18 pagesTheorising Mobility Justice-Mimi Shellerjllorca1288No ratings yet
- European Asphalt Standards DatasheetDocument1 pageEuropean Asphalt Standards DatasheetmandraktreceNo ratings yet
- Hare and Hyena: Mutugi KamundiDocument18 pagesHare and Hyena: Mutugi KamundiAndresileNo ratings yet
- CH-5 Further Percentages AnswersDocument5 pagesCH-5 Further Percentages AnswersMaram MohanNo ratings yet
- Dating Apps MDocument2 pagesDating Apps Mtuanhmt040604No ratings yet
- WWW Studocu Com in N 29646569 Sid 01682568219Document1 pageWWW Studocu Com in N 29646569 Sid 01682568219Nivetha SelvamuruganNo ratings yet
- FHWA Guidance For Load Rating Evaluation of Gusset Plates in Truss BridgesDocument6 pagesFHWA Guidance For Load Rating Evaluation of Gusset Plates in Truss BridgesPatrick Saint-LouisNo ratings yet
- Educationusa 2022globalguide Final Reduced SizeDocument84 pagesEducationusa 2022globalguide Final Reduced SizeAnna ModebadzeNo ratings yet
- Very Narrow Aisle MTC Turret TruckDocument6 pagesVery Narrow Aisle MTC Turret Truckfirdaushalam96No ratings yet
- Song Book Inner PagesDocument140 pagesSong Book Inner PagesEliazer PetsonNo ratings yet
- Pioneer 1019ah-K Repair ManualDocument162 pagesPioneer 1019ah-K Repair ManualjekNo ratings yet
- Project Quality Plan (JFJS-788)Document18 pagesProject Quality Plan (JFJS-788)mominNo ratings yet
- VimDocument258 pagesVimMichael BarsonNo ratings yet
- China Training WCDMA 06-06Document128 pagesChina Training WCDMA 06-06ryanz2009No ratings yet
- Best Mutual Funds For 2023 & BeyondDocument17 pagesBest Mutual Funds For 2023 & BeyondPrateekNo ratings yet
- CATaclysm Preview ReleaseDocument52 pagesCATaclysm Preview ReleaseGhaderalNo ratings yet
- State Space ModelsDocument19 pagesState Space Modelswat2013rahulNo ratings yet
- (20836104 - Artificial Satellites) Investigation of The Accuracy of Google Earth Elevation DataDocument9 pages(20836104 - Artificial Satellites) Investigation of The Accuracy of Google Earth Elevation DataSunidhi VermaNo ratings yet
- PDFDocument27 pagesPDFER Saurabh KatariyaNo ratings yet
- CISF Manual Final OriginalDocument17 pagesCISF Manual Final OriginalVaishnavi JayakumarNo ratings yet
- OT Initial Assessment (OTIA) 2022-11-15Document2 pagesOT Initial Assessment (OTIA) 2022-11-15funtikarNo ratings yet