You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- News CorpDocument17 pagesNews CorpIshita SharmaNo ratings yet
- Hi Scan Pro ManualDocument231 pagesHi Scan Pro ManualFaridhul IkhsanNo ratings yet
- Health EconomicsDocument114 pagesHealth EconomicsGeneva Ruz BinuyaNo ratings yet
- Rhodes Solutions Ch4Document19 pagesRhodes Solutions Ch4Joson Chai100% (4)
- A A 45 Pythagoreantheorem2Document5 pagesA A 45 Pythagoreantheorem2api-167924086No ratings yet
- 12 All TransformationsDocument4 pages12 All TransformationsNg Lay HoonNo ratings yet
- Sideways KeyDocument2 pagesSideways Keyapi-167924086No ratings yet
- 9 Trigonometric RatiosDocument4 pages9 Trigonometric RatiosAhmed NurulNo ratings yet
- Triangle Inequality PracticeDocument1 pageTriangle Inequality Practiceapi-167924086No ratings yet
- 2c Proving ParallelogramsDocument12 pages2c Proving Parallelogramsapi-167924086No ratings yet
- Similarity ApDocument2 pagesSimilarity Apapi-167924086No ratings yet
- LT 3bDocument30 pagesLT 3bapi-167924086No ratings yet
- Similar Triangles Proof HWDocument2 pagesSimilar Triangles Proof HWapi-167924086No ratings yet
- Extra Practice CongruencyDocument2 pagesExtra Practice Congruencyapi-167924086No ratings yet
- Dilations and Scale Factor HWDocument1 pageDilations and Scale Factor HWapi-167924086No ratings yet
- LT 1c HW Classifying and Triangle Angle SumDocument3 pagesLT 1c HW Classifying and Triangle Angle Sumapi-167924086No ratings yet
- LT 3A: SimilarityDocument18 pagesLT 3A: Similarityapi-167924086No ratings yet
- Student Name: - Teacher Name: - Course Name: - Period: - Date: - Assignment: AP LT 2C Parallelogram Proofs Recall/ReproductionDocument2 pagesStudent Name: - Teacher Name: - Course Name: - Period: - Date: - Assignment: AP LT 2C Parallelogram Proofs Recall/Reproductionapi-167924086No ratings yet
- Triangle CongruencyDocument25 pagesTriangle Congruencyapi-167924086No ratings yet
- Cube TransformationsDocument1 pageCube Transformationsapi-167924086No ratings yet
- LT 1a PDFDocument26 pagesLT 1a PDFapi-167924086No ratings yet
- LT 1c MyersDocument42 pagesLT 1c Myersapi-167924086No ratings yet
- LT 1d PPT Parallelograms Jessica Strainss Conflicted Copy 2015-01-15Document25 pagesLT 1d PPT Parallelograms Jessica Strainss Conflicted Copy 2015-01-15api-167924086No ratings yet
- Angles ApDocument2 pagesAngles Apapi-167924086No ratings yet
- Median and Midsegment PracticeDocument2 pagesMedian and Midsegment Practiceapi-167924086No ratings yet
- Tic-Tac-Toe: LT 1DDocument3 pagesTic-Tac-Toe: LT 1Dapi-167924086No ratings yet
- Student Name: - Teacher Name: - Course Name: Geometry Period: - Date: - Assignment: LT 0E HWDocument1 pageStudent Name: - Teacher Name: - Course Name: Geometry Period: - Date: - Assignment: LT 0E HWapi-167924086No ratings yet
- LT 0e LectureDocument17 pagesLT 0e Lectureapi-167924086No ratings yet
- LT 0d SystemsDocument31 pagesLT 0d Systemsapi-167924086No ratings yet
- 1d ScatterplotsDocument12 pages1d Scatterplotsapi-167924086No ratings yet
- LT 1c Battleship Full VersionDocument4 pagesLT 1c Battleship Full Versionapi-167924086No ratings yet
- LT 1b LectureDocument15 pagesLT 1b Lectureapi-167924086No ratings yet
- Predicting Trends From Given DataDocument14 pagesPredicting Trends From Given Dataapi-167924086No ratings yet
- Miranda V AgDocument3 pagesMiranda V AgCARLO JOSE BACTOLNo ratings yet
- BRM 6Document48 pagesBRM 6Tanu GuptaNo ratings yet
- Review Unit 10 Test CHP 17Document13 pagesReview Unit 10 Test CHP 17TechnoKittyKittyNo ratings yet
- Rak Single DentureDocument48 pagesRak Single Denturerakes0No ratings yet
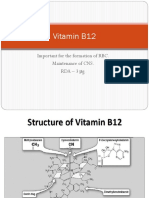
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDocument19 pagesVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathNo ratings yet
- Med 07Document5 pagesMed 07ainee dazaNo ratings yet
- Course Outline Physics EducationDocument3 pagesCourse Outline Physics EducationTrisna HawuNo ratings yet
- Human Performance and LimitationsDocument243 pagesHuman Performance and LimitationsListiyani Ismail100% (2)
- M5-2 CE 2131 Closed Traverse - Interior Angles V2021Document19 pagesM5-2 CE 2131 Closed Traverse - Interior Angles V2021Kiziahlyn Fiona BibayNo ratings yet
- Jaimini Astrology - Calculation of Mandook Dasha With A Case StudyDocument6 pagesJaimini Astrology - Calculation of Mandook Dasha With A Case StudyANTHONY WRITER100% (3)
- Social Marketing PlanDocument25 pagesSocial Marketing PlanChristophorus HariyadiNo ratings yet
- Fs Casas FinalDocument55 pagesFs Casas FinalGwen Araña BalgomaNo ratings yet
- Cost-Benefit Analysis of The ATM Automatic DepositDocument14 pagesCost-Benefit Analysis of The ATM Automatic DepositBhanupriyaNo ratings yet
- Second Periodic Test - 2018-2019Document21 pagesSecond Periodic Test - 2018-2019JUVELYN BELLITANo ratings yet
- LAWHIST - Week1 - Codamon Lim Tan PDFDocument32 pagesLAWHIST - Week1 - Codamon Lim Tan PDFMargell TanNo ratings yet
- Khin Thandar Myint EMPADocument101 pagesKhin Thandar Myint EMPAAshin NandavamsaNo ratings yet
- Vietnamese Grammar Questions and Answers DocumentDocument1 pageVietnamese Grammar Questions and Answers DocumentMinJenNo ratings yet
- Edwards 1999 Emotion DiscourseDocument22 pagesEdwards 1999 Emotion DiscourseRebeca CenaNo ratings yet
- Court Testimony-WpsDocument3 pagesCourt Testimony-WpsCrisanto HernandezNo ratings yet
- Productivity in Indian Sugar IndustryDocument17 pagesProductivity in Indian Sugar Industryshahil_4uNo ratings yet
- Validated UHPLC-MS - MS Method For Quantification of Doxycycline in Abdominal Aortic Aneurysm PatientsDocument14 pagesValidated UHPLC-MS - MS Method For Quantification of Doxycycline in Abdominal Aortic Aneurysm PatientsAkhmad ArdiansyahNo ratings yet
- Ass 3 MGT206 11.9.2020Document2 pagesAss 3 MGT206 11.9.2020Ashiqur RahmanNo ratings yet
- The Great Idea of Brook TaylorDocument7 pagesThe Great Idea of Brook TaylorGeorge Mpantes mathematics teacherNo ratings yet
- Bluetooth Mobile Based College CampusDocument12 pagesBluetooth Mobile Based College CampusPruthviraj NayakNo ratings yet
- Midterms and Finals Topics for Statistics at University of the CordillerasDocument2 pagesMidterms and Finals Topics for Statistics at University of the Cordillerasjohny BraveNo ratings yet
- 1 CH - 7 - WKSHTDocument8 pages1 CH - 7 - WKSHTJohnNo ratings yet