You might also like
- Ratiometric, Linear Hall-Effect Sensors For High-Temperature OperationDocument13 pagesRatiometric, Linear Hall-Effect Sensors For High-Temperature OperationLuiz JesusNo ratings yet
- KFD2 VR4 EX1.26 196355 EngDocument4 pagesKFD2 VR4 EX1.26 196355 EngDurgaram JayavananNo ratings yet
- Cable Fault Locators Surge Wave Generators An OverviewDocument4 pagesCable Fault Locators Surge Wave Generators An OverviewSMART REFILLNo ratings yet
- 5091 4480eDocument6 pages5091 4480eahsoopkNo ratings yet
- Step & Touch Testing Kit MeasurementDocument2 pagesStep & Touch Testing Kit MeasurementPrabu BaskaranNo ratings yet
- Monolithic Difference Amplifiers: Difference (Subtractor) Amplifier ProductsDocument10 pagesMonolithic Difference Amplifiers: Difference (Subtractor) Amplifier Productsv2304451No ratings yet
- Conectica Tratareadatelor AnalogiceDocument26 pagesConectica Tratareadatelor AnalogiceBovinken LaNo ratings yet
- Dat SWG en 160729Document4 pagesDat SWG en 160729SMART REFILLNo ratings yet
- Fault LocatorDocument4 pagesFault LocatorRobert MihayoNo ratings yet
- Sensors WAGoDocument28 pagesSensors WAGoankit_rathi_19No ratings yet
- Experiment No-1: Aim:-Low Resistance Using Kelvin Double BridgeDocument21 pagesExperiment No-1: Aim:-Low Resistance Using Kelvin Double BridgegnathblNo ratings yet
- CN0217Document6 pagesCN0217alraca1234No ratings yet
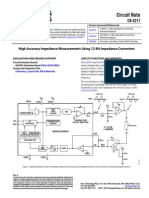
- High Accuracy Impedance Measurements Using 12-Bit Impedance ConvertersDocument6 pagesHigh Accuracy Impedance Measurements Using 12-Bit Impedance Converterschristobal_huntaNo ratings yet
- DiDocument5 pagesDiTao Quang BinhNo ratings yet
- Community Aerial System CAS 3500 Installation and Service ManualDocument7 pagesCommunity Aerial System CAS 3500 Installation and Service ManualAgus SupriyantoNo ratings yet
- Calculate Voltage Drop and Select Cable SizeDocument31 pagesCalculate Voltage Drop and Select Cable SizeCharlotte WilkinsonNo ratings yet
- Voltage Divider ExperimentDocument14 pagesVoltage Divider ExperimentDave Vic Solis100% (2)
- Chapter 6 16052020 045213pm 19062023 052331pmDocument49 pagesChapter 6 16052020 045213pm 19062023 052331pmAbdullah ZamirNo ratings yet
- Amplificador Final de VálvulasDocument6 pagesAmplificador Final de VálvulasTammy WashingtonNo ratings yet
- Substation Overview: B. Prasad Chartered EngineerDocument32 pagesSubstation Overview: B. Prasad Chartered EngineerSurya Narayan Sahu100% (1)
- RLC Series Circuit 07-07-11 PDFDocument10 pagesRLC Series Circuit 07-07-11 PDFMuhammed HuzaifaNo ratings yet
- 250T Frequency TransmitterDocument13 pages250T Frequency Transmitterreality88No ratings yet
- Av 48WP55 PDFDocument69 pagesAv 48WP55 PDFthetvman1968100% (1)
- MC-300 CD - Service ManualDocument28 pagesMC-300 CD - Service ManualMilorad Pajovic100% (1)
- Nuevo Transmisor MetrixDocument18 pagesNuevo Transmisor Metrixoptech_sacNo ratings yet
- Features Description: D D D D D D D D D D D DDocument16 pagesFeatures Description: D D D D D D D D D D D D1eugen1No ratings yet
- Biasing Internally Amplified Accelerometers: Bias RequirementsDocument4 pagesBiasing Internally Amplified Accelerometers: Bias RequirementsNarayan ApteNo ratings yet
- STK416-090-E: 3-Channel Power Switching Audio Power IC, 80W+80W+80WDocument12 pagesSTK416-090-E: 3-Channel Power Switching Audio Power IC, 80W+80W+80WChristopher Ulices Mendieta VasquezNo ratings yet
- Practical 2P12 Semiconductor Devices: What You Should Learn From This PracticalDocument11 pagesPractical 2P12 Semiconductor Devices: What You Should Learn From This PracticalDevesh GargNo ratings yet
- Step & Touch Testing KitDocument4 pagesStep & Touch Testing KitkashifNo ratings yet
- JVC Av-N29304 Av-N29430 Chassis Fe2Document57 pagesJVC Av-N29304 Av-N29430 Chassis Fe2Milo65No ratings yet
- Fluke 179 Supplement Users ManualDocument4 pagesFluke 179 Supplement Users Manualxlam99No ratings yet
- ACS756 DatasheetDocument11 pagesACS756 Datasheetbinhtb14No ratings yet
- Sensor de Presion AndersonDocument6 pagesSensor de Presion AndersonHector VelazquezNo ratings yet
- JVC Av48wp74 Av56wp74 Chassi Sb3Document156 pagesJVC Av48wp74 Av56wp74 Chassi Sb3richardmr1No ratings yet
- Function GeneratorDocument78 pagesFunction GeneratorVishali Chowdary100% (1)
- KALLEY K-TV2xPFDocument17 pagesKALLEY K-TV2xPFNelson David BarrerraNo ratings yet
- Application Note: KVP Measurements On Ge Amx-4Document15 pagesApplication Note: KVP Measurements On Ge Amx-4Bashir MtwaklNo ratings yet
- Series Industrial Transmitter, With Dynamic Signal SensorDocument19 pagesSeries Industrial Transmitter, With Dynamic Signal Sensorfreddy kurniawanNo ratings yet
- AD654Document12 pagesAD654Christopher RiceNo ratings yet
- Philips: Directions For UseDocument13 pagesPhilips: Directions For UseRoberto Morales MedinaNo ratings yet
- 2.2.06 DiDocument5 pages2.2.06 DiMauro MarafonNo ratings yet
- Fundamentals of Floating Measurements and Isolated Input Oscilloscopes - Tektronix - 3AW - 19134 - 2 - MR - LetterDocument8 pagesFundamentals of Floating Measurements and Isolated Input Oscilloscopes - Tektronix - 3AW - 19134 - 2 - MR - LetterluroguitaNo ratings yet
- Relee ElmarkDocument2 pagesRelee ElmarkwawinNo ratings yet
- Service Manual: ModelDocument60 pagesService Manual: ModeldonobeeNo ratings yet
- Service Manual: Model: - SZ2 MONO SeriesDocument20 pagesService Manual: Model: - SZ2 MONO SeriesHamza AbbasiNo ratings yet
- Microwave Lab ManualDocument64 pagesMicrowave Lab ManualPrannoy ChakravarthiNo ratings yet
- CMS 356 Technical Data ENUDocument2 pagesCMS 356 Technical Data ENUKent RenemberNo ratings yet
- Nitronex An9Document9 pagesNitronex An9sanghomitraNo ratings yet
- Sames: Three Phase Power / Energy IC With SPI InterfaceDocument12 pagesSames: Three Phase Power / Energy IC With SPI InterfaceArjun NivassNo ratings yet
- Mirage Pac15 100 CDocument5 pagesMirage Pac15 100 CTopcom Toki-VokiNo ratings yet
- LA 76931S 7N DatasheetDocument20 pagesLA 76931S 7N DatasheetjulioescandonNo ratings yet
- Antenna Analyzer vk5jst Version 1 Instructions PDFDocument10 pagesAntenna Analyzer vk5jst Version 1 Instructions PDFPisu Miau Pisu MiauNo ratings yet
- KV 21RS20Document40 pagesKV 21RS20Luis Emilio QuiñonesNo ratings yet
- Cs 1003Document2 pagesCs 1003Thilagaraj Pannir SelvamNo ratings yet
- Sensor de CorrienteDocument12 pagesSensor de CorrienteFederico RodríguezNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Pressure ElementDocument86 pagesPressure Elementgaurishankar51No ratings yet
- To-18 Packag Dimenzions OkeDocument3 pagesTo-18 Packag Dimenzions OkeMedina Adame DenisNo ratings yet
- Control Systems TheoryDocument331 pagesControl Systems Theorycorsairsan100% (1)
- How To Calculate Reactance of A Capacitor For A Square Wave - Electrical Engineering Stack ExchangeDocument3 pagesHow To Calculate Reactance of A Capacitor For A Square Wave - Electrical Engineering Stack ExchangeMedina Adame DenisNo ratings yet
- Triacs Control BoardDocument1 pageTriacs Control BoardMedina Adame DenisNo ratings yet
- System RequirementsDocument12 pagesSystem RequirementsMedina Adame DenisNo ratings yet
- GX Devloper Func Block Operating ManualDocument84 pagesGX Devloper Func Block Operating ManualMedina Adame DenisNo ratings yet
- An Mosfet Pspice Rev 1 0Document12 pagesAn Mosfet Pspice Rev 1 0Medina Adame DenisNo ratings yet
- Singular Engineer Programming PIC 18 Using XC8 (MPLAB X) - PWM (Using PWM PDFDocument7 pagesSingular Engineer Programming PIC 18 Using XC8 (MPLAB X) - PWM (Using PWM PDFMedina Adame DenisNo ratings yet
- Vector Control (Motor) - Wikipedia, The Free EncyclopediaDocument7 pagesVector Control (Motor) - Wikipedia, The Free EncyclopediaMedina Adame DenisNo ratings yet
- Ac Motor Control Theory (Constant V-F and Vector PWM With DSP Tms320)Document131 pagesAc Motor Control Theory (Constant V-F and Vector PWM With DSP Tms320)roxi50No ratings yet
- InTech-Mathematical Model of The Three Phase Induction Machine For The Study of Steady State and Transient Duty Under Balanced and Unbalanced StatesDocument42 pagesInTech-Mathematical Model of The Three Phase Induction Machine For The Study of Steady State and Transient Duty Under Balanced and Unbalanced StatesMedina Adame DenisNo ratings yet
- Charging Lithium-Ion Batteries - Battery UniversityDocument50 pagesCharging Lithium-Ion Batteries - Battery UniversityMedina Adame Denis100% (2)
- Matlab Tutorial - by TDocument6 pagesMatlab Tutorial - by TMedina Adame DenisNo ratings yet
- NI IMAQdxDocument65 pagesNI IMAQdxEdmundo FerreyraNo ratings yet
- Maple Tutorial For Math 243: Please Send Suggestions and Corrections To Rakesh@math - Udel.eduDocument33 pagesMaple Tutorial For Math 243: Please Send Suggestions and Corrections To Rakesh@math - Udel.eduSameOldHatNo ratings yet
- Learning Objectives-2: Uniform MotionDocument7 pagesLearning Objectives-2: Uniform MotionBryanHarold BrooNo ratings yet
- Gamma World 1E Mutations PDFDocument23 pagesGamma World 1E Mutations PDFSean M Kelly100% (1)
- Math 070838Document13 pagesMath 070838Jeric Boy GarampilNo ratings yet
- CEIC2000 Thermodynamics - Lecture 2 The First Law Forms of EnergyDocument49 pagesCEIC2000 Thermodynamics - Lecture 2 The First Law Forms of EnergyJoshua JohnNo ratings yet
- Homework 1Document6 pagesHomework 1Ahmet Kemal ÇetinNo ratings yet
- Astm 1784Document4 pagesAstm 1784arifin rizalNo ratings yet
- Wireless Pick and Place RobotDocument26 pagesWireless Pick and Place RobotAshok GudivadaNo ratings yet
- WhatReallyisUHPC TowardsaGlobalDefinition UHPC2018FuzhouChina July292018Document14 pagesWhatReallyisUHPC TowardsaGlobalDefinition UHPC2018FuzhouChina July292018Данило ГадайчукNo ratings yet
- Product Note PD30 en RevA 2011 Anti-Sway Control ProgramDocument2 pagesProduct Note PD30 en RevA 2011 Anti-Sway Control ProgramkumarNo ratings yet
- 11P Trusses ProblemsDocument39 pages11P Trusses ProblemsHoward Johann Gomez VNo ratings yet
- Exponential Functions and Their Graphs PDFDocument2 pagesExponential Functions and Their Graphs PDFCarrieNo ratings yet
- Topic 5 - Criticality of Homogeneous ReactorsDocument53 pagesTopic 5 - Criticality of Homogeneous ReactorsSit LucasNo ratings yet
- Karthik Vickraman: Work ExperienceDocument1 pageKarthik Vickraman: Work ExperienceVishaal KannaNo ratings yet
- DEVELOPMENT AND TEST OF THE BO 105 RIGID ROTOR HELICOPTERDocument16 pagesDEVELOPMENT AND TEST OF THE BO 105 RIGID ROTOR HELICOPTERГригорий ОмельченкоNo ratings yet
- 09-The Synthesis and Analysis of AspirinDocument12 pages09-The Synthesis and Analysis of AspirinJeffrey Lee100% (2)
- Flight Without Formulae 158p PDFDocument158 pagesFlight Without Formulae 158p PDFvvb_frndNo ratings yet
- Turbomachineries School of Mechanical and Industrial Engineering Debre Markos UniversityDocument58 pagesTurbomachineries School of Mechanical and Industrial Engineering Debre Markos UniversitybirlieNo ratings yet
- Siesmic Protection Ufc 3 310 04Document128 pagesSiesmic Protection Ufc 3 310 04irastemhemNo ratings yet
- Active Suspension Using SkyhookDocument14 pagesActive Suspension Using SkyhookSandor CleganeNo ratings yet
- Malla Curricular Ingenieria Civil UNTRMDocument1 pageMalla Curricular Ingenieria Civil UNTRMhugo maldonado mendoza50% (2)
- Elementarysurvey PDFDocument167 pagesElementarysurvey PDFStanley OnyejiNo ratings yet
- Newtonian Fluid - WikipediaDocument5 pagesNewtonian Fluid - Wikipediaamit kumar guptaNo ratings yet
- Fluids HandlingDocument234 pagesFluids HandlingVenkatesh GangadharNo ratings yet
- Company Profile: BIS CML No.: 7200050893 An Iso 9001:2015 Certified CompanyDocument4 pagesCompany Profile: BIS CML No.: 7200050893 An Iso 9001:2015 Certified CompanyPowerliteNo ratings yet
- WinspireDocument44 pagesWinspireBhanu PrakashNo ratings yet
- Exp 4 Chem 17 LabDocument7 pagesExp 4 Chem 17 LabGabrielle CatalanNo ratings yet
- Panel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltDocument2 pagesPanel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltEmmersonLisboaNo ratings yet
- The Must-Have Guide to Centrifugal PumpsDocument24 pagesThe Must-Have Guide to Centrifugal PumpsStacy Wilson100% (1)
- Chemical analysis of food lipidsDocument8 pagesChemical analysis of food lipidsmercedescristobalNo ratings yet
- Mcas Magnetism ElectricityDocument27 pagesMcas Magnetism ElectricityBea GonzalesNo ratings yet