You might also like
- Hydraulic-Powered Robotic Arm PDFDocument8 pagesHydraulic-Powered Robotic Arm PDFsaurabh satsangiNo ratings yet
- Syringe Actuated Mechanical ArmDocument17 pagesSyringe Actuated Mechanical ArmMohd Subhan0% (1)
- Pick & Place Robot Arm ControlDocument14 pagesPick & Place Robot Arm ControlAkshay byp100% (1)
- Final Pick and Place ReportDocument48 pagesFinal Pick and Place ReportPraveen D JadhavNo ratings yet
- Universal Soft Pneumatic Robotic Gripper With Variable Effective LengthDocument6 pagesUniversal Soft Pneumatic Robotic Gripper With Variable Effective Lengthflv_91No ratings yet
- Introduction to Robotics Course OverviewDocument4 pagesIntroduction to Robotics Course OverviewgurusaravanaNo ratings yet
- Design and Fabrication of Oil Skimmer RobotDocument46 pagesDesign and Fabrication of Oil Skimmer RobotSathiya Udumalpet100% (2)
- Robotic Pick and Place for Airport CargoDocument11 pagesRobotic Pick and Place for Airport Cargopappa20No ratings yet
- Project Report Hexapod RobotDocument3 pagesProject Report Hexapod RobotJunaid JahangirNo ratings yet
- LTCC and HTCC PDFDocument3 pagesLTCC and HTCC PDFPhan Xuân TuấnNo ratings yet
- Computer Aided Metrology PrinciplesDocument3 pagesComputer Aided Metrology PrinciplesramptechNo ratings yet
- Review of Control Systems in RoboticsDocument10 pagesReview of Control Systems in Roboticsroyson316No ratings yet
- Mechanics of Machines Fundamental ConceptsDocument64 pagesMechanics of Machines Fundamental ConceptsRavi TarunNo ratings yet
- Hydraulic and pneumatic systems examDocument2 pagesHydraulic and pneumatic systems examAravinthNo ratings yet
- Walking Trajectory Control of A Biped RobotDocument18 pagesWalking Trajectory Control of A Biped RobotBogdan PopNo ratings yet
- Path Following For A Differential Drive Robot - MATLAB & Simulink ExampleDocument8 pagesPath Following For A Differential Drive Robot - MATLAB & Simulink Exampletdit84No ratings yet
- Peak-And Average-Power Reduction in Check-Based BIST by Using Bit-Swapping LFSR and Check-Chain OrderingDocument7 pagesPeak-And Average-Power Reduction in Check-Based BIST by Using Bit-Swapping LFSR and Check-Chain OrderingInternational Organization of Scientific Research (IOSR)No ratings yet
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocument18 pagesFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Self Balancing Robot Using ArduinoDocument7 pagesSelf Balancing Robot Using ArduinoTarun kumarNo ratings yet
- Robot Motion Planning: Approaches and Research IssuesDocument26 pagesRobot Motion Planning: Approaches and Research IssuesRahul KalaNo ratings yet
- Fractal Robots Seminar ReportDocument27 pagesFractal Robots Seminar ReportAkhil ThomasNo ratings yet
- Major Synopsis On Hydraulic ArmDocument7 pagesMajor Synopsis On Hydraulic ArmPrashant Balhara0% (2)
- Cu Spray Robot LastDocument42 pagesCu Spray Robot LastRakibul HassanNo ratings yet
- SMART MATERIALS AND STRUCTURES TECHNOLOGYDocument40 pagesSMART MATERIALS AND STRUCTURES TECHNOLOGYAnkit ShandilyaNo ratings yet
- r05320305 Design of Machine Members IIDocument11 pagesr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- Self Healing Robots - Seminar ReportDocument33 pagesSelf Healing Robots - Seminar ReportVishnu Ravindran60% (10)
- ForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFDocument11 pagesForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFAshar HaroonNo ratings yet
- Drawing RobotDocument9 pagesDrawing Robotmarius_danila8736100% (1)
- FEM Notes 2016 PDFDocument71 pagesFEM Notes 2016 PDFjamesNo ratings yet
- Autonomous Vaccum Cleaner ReportDocument10 pagesAutonomous Vaccum Cleaner ReportOmkar KarnikNo ratings yet
- Wheel Leg 2011-224Document8 pagesWheel Leg 2011-224idorofte8235No ratings yet
- Final Year Project Report Robotic ArmDocument11 pagesFinal Year Project Report Robotic ArmAmr ElsakkaNo ratings yet
- Fabrication of Plant Irrigation Water SprinklerDocument10 pagesFabrication of Plant Irrigation Water SprinklerSanjayNo ratings yet
- Building A Two Wheeled Balancing RobotDocument120 pagesBuilding A Two Wheeled Balancing RobotCp Em PheeradorNo ratings yet
- L8 - Example For Jacobian of RobotsDocument8 pagesL8 - Example For Jacobian of RobotsZul Fadhli100% (1)
- Pick and Place Robot Arm For Metal and Non-Metal DetectionDocument6 pagesPick and Place Robot Arm For Metal and Non-Metal DetectionAnonymous izrFWiQ100% (1)
- Technical Seminar Presentation HarishDocument21 pagesTechnical Seminar Presentation Harishprashanth nNo ratings yet
- ROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliDocument10 pagesROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliMahendra Babu Mekala100% (2)
- Chapter 1 PM CM SMDocument67 pagesChapter 1 PM CM SMZulhelmi MansorNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- A Project Report ON Straight Muffler: Centurion University of Technology and ManagementDocument31 pagesA Project Report ON Straight Muffler: Centurion University of Technology and ManagementSadhan PadhiNo ratings yet
- Design and Fabrication of a Multi-Fingered Robotic GripperDocument35 pagesDesign and Fabrication of a Multi-Fingered Robotic GripperSMART_GEEKNo ratings yet
- ROBOTICS TITLEDocument10 pagesROBOTICS TITLEmaverickhydronNo ratings yet
- Robotics, Laboratory ManualDocument26 pagesRobotics, Laboratory ManualManu SharmaNo ratings yet
- A Major Project Report On: Analysis and Improvement of Power Distribution System of MANIT, BhopalDocument20 pagesA Major Project Report On: Analysis and Improvement of Power Distribution System of MANIT, BhopalAditya Kumar SinghNo ratings yet
- Lecture 2-HypermeshDocument37 pagesLecture 2-Hypermeshkashish4u100% (1)
- Walking Movement in RobotDocument24 pagesWalking Movement in RobotNandy ObNo ratings yet
- Painting Robot ArmDocument65 pagesPainting Robot ArmBrook EshetuNo ratings yet
- Robotics Lab Report Group 8 PDFDocument16 pagesRobotics Lab Report Group 8 PDFSourabh AgrawalNo ratings yet
- Robotics Chapter 5 - Robot VisionDocument7 pagesRobotics Chapter 5 - Robot Visiontutorfelix777No ratings yet
- Anti Brake SystemDocument15 pagesAnti Brake SystemRenu ShindeNo ratings yet
- Robot MechanismsDocument17 pagesRobot MechanismssnoozermanNo ratings yet
- Skimmer Kecil PDFDocument4 pagesSkimmer Kecil PDFAhmadRafiSeferagicNo ratings yet
- Helmet Detect ReportDocument29 pagesHelmet Detect ReportDeepak0% (1)
- Multibody System Simulation With SimmechanicsDocument24 pagesMultibody System Simulation With SimmechanicsSonny Jason ANo ratings yet
- Chapter 2 SolutionDocument4 pagesChapter 2 SolutionEngr ShabirNo ratings yet
- Robotics and Automations Material - M - Vinoth KumarDocument63 pagesRobotics and Automations Material - M - Vinoth Kumartumati venkata vinayNo ratings yet
- Color Based Object Sorting Robot Development: A ReviewDocument4 pagesColor Based Object Sorting Robot Development: A ReviewIJRASETPublications100% (1)
- Proposed Project Execution Baseline Schedule Rev BDocument1 pageProposed Project Execution Baseline Schedule Rev BseehariNo ratings yet
- TOTAL FIBONACCI TRADING TRADE SETUPSDocument12 pagesTOTAL FIBONACCI TRADING TRADE SETUPSChandler BingNo ratings yet
- PJT-PDP-TLM-733 Project Document & Drawing NumberingDocument19 pagesPJT-PDP-TLM-733 Project Document & Drawing NumberingseehariNo ratings yet
- Andreas Dracoulis - Haynes and BooneDocument15 pagesAndreas Dracoulis - Haynes and BooneJoão Mendonça SantosNo ratings yet
- Numbering SystemDocument8 pagesNumbering SystemseehariNo ratings yet
- Operations Department Procedure Manual: by byDocument29 pagesOperations Department Procedure Manual: by byseehariNo ratings yet
- Charter Party PDFDocument149 pagesCharter Party PDFseehariNo ratings yet
- Pre-Comm Sow Sogtrev0Document10 pagesPre-Comm Sow Sogtrev0seehariNo ratings yet
- Snagit 13 - CaptureDocument71 pagesSnagit 13 - CaptureseehariNo ratings yet
- Diagramma Della Verita by GalilieoDocument11 pagesDiagramma Della Verita by Galilieopremnaryans50% (2)
- 48'' Pipeline Shore Approach Reportpdf PDFDocument22 pages48'' Pipeline Shore Approach Reportpdf PDFvpandya1981100% (2)
- KPMG Law - Legal Guideline For Offshore Project Contracts PDFDocument24 pagesKPMG Law - Legal Guideline For Offshore Project Contracts PDFseehari100% (1)
- Google book search project to digitize public domain textsDocument232 pagesGoogle book search project to digitize public domain textsseehariNo ratings yet
- 20jan15raymondflood FourierDocument40 pages20jan15raymondflood FourierseehariNo ratings yet
- Trading The MACDDocument24 pagesTrading The MACDemirav283% (6)
- Harmonic Analysis: Chapter TenDocument40 pagesHarmonic Analysis: Chapter TenKishore Chandrasekhar PatnaikNo ratings yet
- Volume Average ExponentialDocument9 pagesVolume Average ExponentialrentacuraNo ratings yet
- .B.E.-B.Tech - VTUDocument8 pages.B.E.-B.Tech - VTUyamaha640No ratings yet
- Trading The MACDDocument24 pagesTrading The MACDemirav283% (6)
- Pasavento Instructions For Zup Pattern IndicatorDocument13 pagesPasavento Instructions For Zup Pattern IndicatormleefxNo ratings yet
- TEPZZ 7Z - A T: European Patent ApplicationDocument39 pagesTEPZZ 7Z - A T: European Patent ApplicationseehariNo ratings yet
- Intro To Ortho ProjectionDocument22 pagesIntro To Ortho ProjectionseehariNo ratings yet
- Alt Fuel PropertiesDocument3 pagesAlt Fuel PropertiesseehariNo ratings yet
- Creating A Frame Title BlockDocument2 pagesCreating A Frame Title BlockseehariNo ratings yet
- M.tech - Credit SystemDocument16 pagesM.tech - Credit SystemRamesh BammankattiNo ratings yet
- Motion Um002 en PDocument280 pagesMotion Um002 en PseehariNo ratings yet
- 2nd Internal Question Papers For Electrical and ElectronicsDocument1 page2nd Internal Question Papers For Electrical and ElectronicsseehariNo ratings yet
- MCS R6Y DrawingDocument4 pagesMCS R6Y DrawingseehariNo ratings yet
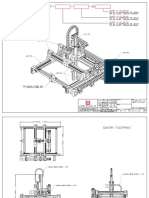
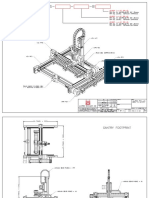
- HBG 25 Gantry Robot PrintDocument1 pageHBG 25 Gantry Robot PrintseehariNo ratings yet
- MCS R6S Belt Z DrawingDocument4 pagesMCS R6S Belt Z DrawingseehariNo ratings yet
- Gold Medals List 2013Document10 pagesGold Medals List 2013Naveed Khan AbbuNo ratings yet
- Vehicle Tracking Using Android AppDocument2 pagesVehicle Tracking Using Android AppmonkeNo ratings yet
- JS BASICSDocument14 pagesJS BASICSDhan CabugaoNo ratings yet
- Joint Venture ReportDocument15 pagesJoint Venture ReportRavi MalhotraNo ratings yet
- IRT Report FormatDocument7 pagesIRT Report Formatshahbaz akramNo ratings yet
- Leica DISTO™ Transfer PC GuideDocument34 pagesLeica DISTO™ Transfer PC GuidefistralloNo ratings yet
- Universiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing Engineering BDA 24202 Computer Programming Individual Assignment (10%)Document1 pageUniversiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing Engineering BDA 24202 Computer Programming Individual Assignment (10%)farooq MusaNo ratings yet
- Hi-Fog For Buildings: Technical IntroductionDocument16 pagesHi-Fog For Buildings: Technical IntroductionEsther TapiaNo ratings yet
- Lockout TagoutDocument41 pagesLockout Tagoutm_alodat6144100% (1)
- Online Bike Parts Store and Rental SystemDocument4 pagesOnline Bike Parts Store and Rental SystemriysNo ratings yet
- Yealink W52P Auto Provisioning User GuideDocument76 pagesYealink W52P Auto Provisioning User GuidedragelecNo ratings yet
- Edit and query features offlineDocument4 pagesEdit and query features offlinenagendra reddy panyamNo ratings yet
- User - S Manual of Haiwell Cloud BoxDocument28 pagesUser - S Manual of Haiwell Cloud BoxMOHAMMED AKILNo ratings yet
- Bist Tutorial 2 PDFDocument9 pagesBist Tutorial 2 PDFjcfermosellNo ratings yet
- MRP User GuideDocument691 pagesMRP User GuideZubair KhanNo ratings yet
- Taxonomy of Architectural StylesDocument4 pagesTaxonomy of Architectural StylesMason MountNo ratings yet
- Azamat Front-End CVDocument1 pageAzamat Front-End CVdzhirtanov.aNo ratings yet
- Eddy Current TestingDocument48 pagesEddy Current TestingBhuvanesh Ponnan86% (7)
- Microhard IPN2420F ManualDocument225 pagesMicrohard IPN2420F ManualAnandNo ratings yet
- TB 971Document5 pagesTB 971rybthenry engineNo ratings yet
- Congress ProgramDocument10 pagesCongress ProgramGuillermo Garcia HernandezNo ratings yet
- Gesture-Based Interaction - Lecture 8 - Next Generation User Interfaces (4018166FNR)Document56 pagesGesture-Based Interaction - Lecture 8 - Next Generation User Interfaces (4018166FNR)Beat SignerNo ratings yet
- A Procedure To Verify and Validate An FPGA Level Testing As Per DO-254Document6 pagesA Procedure To Verify and Validate An FPGA Level Testing As Per DO-254sezgin bayramNo ratings yet
- Advanced Spreadsheet Skills: ACTIVITY NO. 1 Computing Data, Especially Student's Grades, MightDocument18 pagesAdvanced Spreadsheet Skills: ACTIVITY NO. 1 Computing Data, Especially Student's Grades, MightKakashimoto OGNo ratings yet
- Template For Evaluation PDFDocument3 pagesTemplate For Evaluation PDFjaterNo ratings yet
- Green Building Rating Tool - XXXXDocument17 pagesGreen Building Rating Tool - XXXXSakisNo ratings yet
- Chapter II NewDocument10 pagesChapter II NewAbigail Senaon De MesaNo ratings yet
- HubSpot Reporting Certification AnswersDocument23 pagesHubSpot Reporting Certification AnswersE KaynaklarNo ratings yet
- Tomorrow I LL Learn PHP Global Variables. This Is A Bad Command: Del C: .Document5 pagesTomorrow I LL Learn PHP Global Variables. This Is A Bad Command: Del C: .harsh bathlqNo ratings yet
- Internsship - Project - Arjun Singh FinalDocument78 pagesInternsship - Project - Arjun Singh FinalAnmol DubeyNo ratings yet