You might also like
- Rosenthal - Some Minor Problems in The QuranDocument10 pagesRosenthal - Some Minor Problems in The QuranAndrew HammondNo ratings yet
- Tbone - A Zero-Click Exploit For Tesla Mcus: Ralf-Philipp Weinmann and Benedikt SchmotzleDocument13 pagesTbone - A Zero-Click Exploit For Tesla Mcus: Ralf-Philipp Weinmann and Benedikt SchmotzleFred LamertNo ratings yet
- One common exception is specifying the HTTP port 80 explicitly when connecting to a non-standard port for a web serverDocument69 pagesOne common exception is specifying the HTTP port 80 explicitly when connecting to a non-standard port for a web servermiraclesureshNo ratings yet
- Using The Serial Port With A MATLAB GUIDocument34 pagesUsing The Serial Port With A MATLAB GUIJeya RamanNo ratings yet
- RS-232 Serial Communication in C# .NETDocument35 pagesRS-232 Serial Communication in C# .NETdokeosNo ratings yet
- Unit 2Document11 pagesUnit 2Mohan KumarNo ratings yet
- Guidelines for use of library Keypad_MC17Document4 pagesGuidelines for use of library Keypad_MC17Farty PantsNo ratings yet
- Unit-Ii: Socket Address StructuresDocument17 pagesUnit-Ii: Socket Address Structuresakbarviveka_16156616No ratings yet
- Wireless Communication Using NRF24L01 Transceiver ModuleDocument8 pagesWireless Communication Using NRF24L01 Transceiver ModuleDeepak KumbharNo ratings yet
- ENTIC, Track 3, Serial communicationsDocument9 pagesENTIC, Track 3, Serial communicationsXavi Medina Tolra100% (1)
- Project 1Document12 pagesProject 1John SmithNo ratings yet
- Modbus App v00Document43 pagesModbus App v00siashahabNo ratings yet
- Kitsos Hermes8 128 Stream CipherDocument4 pagesKitsos Hermes8 128 Stream CipherghionoiucNo ratings yet
- Modbus Interface RISH M01 InfoDocument18 pagesModbus Interface RISH M01 InfoMustafa HasanNo ratings yet
- University Automoma of Queretaro Engineering Faculty: Digital System 2Document15 pagesUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- Npc03 UpdatedDocument21 pagesNpc03 UpdatedMarah IrshedatNo ratings yet
- IQ3/XNC Modbus Master Installation and Configuration GuideDocument12 pagesIQ3/XNC Modbus Master Installation and Configuration Guidejgr77No ratings yet
- Serial Port Communication LabviewDocument5 pagesSerial Port Communication Labviewpj_bank100% (2)
- Block I Apollo Guidance Computer (AGC) : How To Build One in Your BasementDocument20 pagesBlock I Apollo Guidance Computer (AGC) : How To Build One in Your BasementpabloNo ratings yet
- PRONEM-midi Register Address For Modbus RtuDocument12 pagesPRONEM-midi Register Address For Modbus Rtumaxwell onyekachukwuNo ratings yet
- Sol 2003 NetworksDocument15 pagesSol 2003 NetworkssumanchakravarthiNo ratings yet
- PC 2 PCDocument8 pagesPC 2 PCfactotum90No ratings yet
- Simple Mod Bus MasterDocument5 pagesSimple Mod Bus MasterAldenirJoseBatistaNo ratings yet
- Esc - 1991 - Vol2 - Page710 - Ward - Manipulating Hardware With CDocument6 pagesEsc - 1991 - Vol2 - Page710 - Ward - Manipulating Hardware With CGiap LeNo ratings yet
- HW2 ReportDocument9 pagesHW2 ReportSamuelBoakyeNo ratings yet
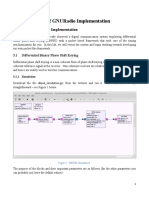
- Lab 2 Gnuradio ImplementationDocument8 pagesLab 2 Gnuradio ImplementationSreeraj RajendranNo ratings yet
- Spot ProtocolDocument12 pagesSpot Protocolj_pozo_c209No ratings yet
- Sram Low Power DecoderDocument7 pagesSram Low Power DecoderKedhar MallaNo ratings yet
- CS 50 Software Design and Implementation Socket Programming: GoalsDocument20 pagesCS 50 Software Design and Implementation Socket Programming: GoalsUtsav DubeyNo ratings yet
- How To Use IIC On S08Document18 pagesHow To Use IIC On S08Manuel Enrique GutierrezNo ratings yet
- Serial Communication With ArduinoDocument12 pagesSerial Communication With Arduinoshivamrockz100% (1)
- The Test On CS: List - Based - Memory - Management.cDocument7 pagesThe Test On CS: List - Based - Memory - Management.cmichaelgodfatherNo ratings yet
- An 3Document6 pagesAn 3Carlos H. GojleviciusNo ratings yet
- Information Theory, Coding and Cryptography Unit-5 by Arun Pratap SinghDocument79 pagesInformation Theory, Coding and Cryptography Unit-5 by Arun Pratap SinghArunPratapSingh100% (2)
- ApplicationsDocument44 pagesApplicationsmerinjose123100% (1)
- Modbus Rtu Protocol PDFDocument18 pagesModbus Rtu Protocol PDFsavaobayNo ratings yet
- ARTNET Receiver V3.inoDocument4 pagesARTNET Receiver V3.inoESIN NISENo ratings yet
- MEMORY MAPDocument10 pagesMEMORY MAPMarieFernandesNo ratings yet
- Read Me Slave 2.1Document7 pagesRead Me Slave 2.1Prasad VylaleNo ratings yet
- spinnaker commandDocument4 pagesspinnaker commandHeet ShahNo ratings yet
- DS1307 I2C RTC Interfacing TutorialDocument8 pagesDS1307 I2C RTC Interfacing TutorialgudduNo ratings yet
- Protocol Kube ENG01Document27 pagesProtocol Kube ENG01isao chinenNo ratings yet
- AVR DAC 328 TutorialDocument5 pagesAVR DAC 328 Tutorialsutekidane7435No ratings yet
- Fprintf Fprintf ( PHYS352') PHYS352 Fopen Id Fopen ( Datafile - TXT','W') R' W' Fopen IdDocument5 pagesFprintf Fprintf ( PHYS352') PHYS352 Fopen Id Fopen ( Datafile - TXT','W') R' W' Fopen IdbaruaeeeNo ratings yet
- Faculty of Engineering and Technology Department of Computer Science and EngineeringDocument44 pagesFaculty of Engineering and Technology Department of Computer Science and EngineeringArkadip ChowdhuryNo ratings yet
- Cs501 Finalterm Paper 31 July 2013: All Mcqs From My Paper (New + Old)Document7 pagesCs501 Finalterm Paper 31 July 2013: All Mcqs From My Paper (New + Old)Faisal Abbas BastamiNo ratings yet
- ESP8266 - Independent Study - mr945 PDFDocument49 pagesESP8266 - Independent Study - mr945 PDFsaravananNo ratings yet
- Chapter 2 Learning To Use The Hardware and SoftwareDocument86 pagesChapter 2 Learning To Use The Hardware and SoftwareosbihatNo ratings yet
- MEMORY SYSTEM OVERVIEWDocument68 pagesMEMORY SYSTEM OVERVIEWshiva100% (1)
- Modbus BasicsDocument9 pagesModbus Basicsmuppallanarendra100% (2)
- Unit IV-ElementaryUDPSocket-Name and Adddress ConversionDocument27 pagesUnit IV-ElementaryUDPSocket-Name and Adddress ConversionAnanyaNo ratings yet
- MPMC UNIT 1 OwnDocument35 pagesMPMC UNIT 1 OwnchintuNo ratings yet
- OneWire Ds18b020 Termometre UygulamasımikrocDocument4 pagesOneWire Ds18b020 Termometre Uygulamasımikrocabdulkadir dönerNo ratings yet
- Assembling, Linking and Executing ProgramDocument7 pagesAssembling, Linking and Executing ProgramSumaira MustafaNo ratings yet
- 4085 Cao Ass6Document4 pages4085 Cao Ass614SYCMIIIShruti DawangeNo ratings yet
- SIMD TutorialDocument17 pagesSIMD Tutorialzzal119911No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- PC Engine / TurboGrafx-16 Architecture: Architecture of Consoles: A Practical Analysis, #16From EverandPC Engine / TurboGrafx-16 Architecture: Architecture of Consoles: A Practical Analysis, #16No ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Celebrating Ghadeer and Forgetting Wilayat Is Not Fair!Document8 pagesCelebrating Ghadeer and Forgetting Wilayat Is Not Fair!Sibtain Al HussainiNo ratings yet
- Front Panel Tutorial: Learn Controls, Indicators, Data TypesDocument6 pagesFront Panel Tutorial: Learn Controls, Indicators, Data Typescuterose95No ratings yet
- Basic Structural Design ConceptsDocument21 pagesBasic Structural Design Conceptscuterose95No ratings yet
- Robust NotesDocument23 pagesRobust Notescuterose95No ratings yet
- Lec-Design of Sewer Systems (Compatibility Mode)Document14 pagesLec-Design of Sewer Systems (Compatibility Mode)cuterose95100% (1)
- PIC 16f877a Data SheetDocument234 pagesPIC 16f877a Data Sheetanon-26401438% (8)
- Signals in MatLab PDFDocument18 pagesSignals in MatLab PDFPratik SarkarNo ratings yet
- Lab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To FilteringDocument15 pagesLab 4. LTI Systems, The Z-Transform, and An Introduc-Tion To Filteringcuterose95No ratings yet
- Serial Port Using GUIDocument11 pagesSerial Port Using GUIcuterose95No ratings yet
- Temp Me AsDocument1 pageTemp Me Ascuterose95No ratings yet
- The I2C Bus SpecificationsDocument46 pagesThe I2C Bus Specificationsshrivastav.ajay100% (14)
- XQueryDocument123 pagesXQuerygauti viruNo ratings yet
- NUMBERDocument28 pagesNUMBERsnayderNo ratings yet
- Entropy Measures For Plithogenic Sets and Applications in Multi-Attribute Decision MakingDocument17 pagesEntropy Measures For Plithogenic Sets and Applications in Multi-Attribute Decision MakingScience DirectNo ratings yet
- Python Project On Lokshabha ElectionDocument22 pagesPython Project On Lokshabha ElectionsamNo ratings yet
- Activate Voice Mail and Forward CallsDocument3 pagesActivate Voice Mail and Forward CallsmohNo ratings yet
- Tema 12 Literatura Norteamericana UNEDDocument21 pagesTema 12 Literatura Norteamericana UNEDJose Antonio Rodriguez AlmagroNo ratings yet
- Logic Workshop on Modus Tollens, Modus Ponens, Truth TablesDocument1 pageLogic Workshop on Modus Tollens, Modus Ponens, Truth TablesAvanindra Kumar PandeyaNo ratings yet
- Unit 06 The First University in Viet Nam Lesson 3 A Closer Look 2Document14 pagesUnit 06 The First University in Viet Nam Lesson 3 A Closer Look 2Thơ NguyễnNo ratings yet
- 500 Spanish VerbsDocument25 pages500 Spanish VerbshashemNo ratings yet
- NY Test PrepDocument75 pagesNY Test PrepYianniNo ratings yet
- Course: CCNA-Cisco Certified Network Associate: Exam Code: CCNA 640-802 Duration: 70 HoursDocument7 pagesCourse: CCNA-Cisco Certified Network Associate: Exam Code: CCNA 640-802 Duration: 70 HoursVasanthbabu Natarajan NNo ratings yet
- CSP-40, 41 & 11 AssignmentsDocument9 pagesCSP-40, 41 & 11 AssignmentsSagarika MishraNo ratings yet
- Evaluating EFL Students' Reading SkillsDocument307 pagesEvaluating EFL Students' Reading SkillsGilbertNo ratings yet
- Soal UKK Bahasa Inggris Kelas XDocument11 pagesSoal UKK Bahasa Inggris Kelas Xsman sakraNo ratings yet
- Aiip HW1Document2 pagesAiip HW1Godishala SanthoshNo ratings yet
- Tugas Mandiri Offering Help by Mr. DadangDocument7 pagesTugas Mandiri Offering Help by Mr. DadangSiti NurhafisyaNo ratings yet
- Nemoh Manual v3.0.1Document44 pagesNemoh Manual v3.0.1hosikshonaNo ratings yet
- Administration Guide: Fortinet Server Authentication Extension™ Version 3.0 MR7Document36 pagesAdministration Guide: Fortinet Server Authentication Extension™ Version 3.0 MR7regabriNo ratings yet
- Degree of ComparisonDocument2 pagesDegree of ComparisonDella futvyNo ratings yet
- SICAM A8000 Series Sicam Rtus Sicam Toolbox Ii SICAM Device ManagerDocument72 pagesSICAM A8000 Series Sicam Rtus Sicam Toolbox Ii SICAM Device ManagerMohammed MostefaiNo ratings yet
- Adobe Flash Player 10.1 Read MeDocument3 pagesAdobe Flash Player 10.1 Read MemickemusicNo ratings yet
- Glossary-U of Magic TermsDocument8 pagesGlossary-U of Magic TermsReppin SetsNo ratings yet
- Class 5 AssignmentDocument13 pagesClass 5 Assignmentnajaf shanNo ratings yet
- ES 22 Lab ManualDocument33 pagesES 22 Lab ManualRoselle Joy Dela CruzNo ratings yet
- KUKA OfficeLite 87 enDocument48 pagesKUKA OfficeLite 87 enMatyas TakacsNo ratings yet
- 1 Mark The Jogger Interactive WorksheetDocument1 page1 Mark The Jogger Interactive WorksheetHuma RiazNo ratings yet
- Hualin1.1 Deeg Final PDFDocument33 pagesHualin1.1 Deeg Final PDFpeacelumbiniNo ratings yet
- 1A Unit2 Part2Document46 pages1A Unit2 Part2Krystal SorianoNo ratings yet
- The Challenge of Ecojustice Readings For Christian Theology - Norman C HabelDocument17 pagesThe Challenge of Ecojustice Readings For Christian Theology - Norman C HabelAlbert Parsaoran SihotangNo ratings yet