You might also like
- What Is DCS SystemDocument30 pagesWhat Is DCS SystemSuputraNo ratings yet
- Basic Concept of DCSDocument11 pagesBasic Concept of DCSWidodo Pudji MuljantoNo ratings yet
- Distributed Control SystemDocument8 pagesDistributed Control SystemParth ShethNo ratings yet
- Distributed Control Systems (DCS)Document13 pagesDistributed Control Systems (DCS)Aparna GirishNo ratings yet
- DCS Group 8 Report on Distributed Control Systems</40Document20 pagesDCS Group 8 Report on Distributed Control Systems</40Takudzwa MatangiraNo ratings yet
- Instrumentation Automation Part25Document2 pagesInstrumentation Automation Part25ArunNo ratings yet
- Scada DcsDocument18 pagesScada Dcsahmed s. NourNo ratings yet
- Difference Between PLC and DcsDocument2 pagesDifference Between PLC and DcsHari PrasanthNo ratings yet
- Distributed Control SystemDocument42 pagesDistributed Control SystemAdventurerNo ratings yet
- Electric Drives and Controls Pneumatics Service Linear Motion and Assembly Technologies HydraulicsDocument102 pagesElectric Drives and Controls Pneumatics Service Linear Motion and Assembly Technologies HydraulicsAnderson ThiagoNo ratings yet
- Pic Based PLCDocument21 pagesPic Based PLCWaqas Maqsud100% (1)
- Industrial Communication NetworksDocument20 pagesIndustrial Communication Networksabdel taibNo ratings yet
- Logics and Distributed Control SystemDocument25 pagesLogics and Distributed Control SystemJoshNo ratings yet
- Modbus RTU Versus TCP/IPDocument4 pagesModbus RTU Versus TCP/IPRachiahi TarikNo ratings yet
- H.D.L - Lab: For IV Semester B.EDocument78 pagesH.D.L - Lab: For IV Semester B.EHarsha MlNo ratings yet
- PLC Vs DCS (Important Difference)Document2 pagesPLC Vs DCS (Important Difference)Lugard WoduNo ratings yet
- 02 - DCS - Introduction To DCSDocument27 pages02 - DCS - Introduction To DCSSyahir ZufayriNo ratings yet
- What Is Instrument I - O ListDocument1 pageWhat Is Instrument I - O ListzhangyiliNo ratings yet
- DS Pressure Transmitter PDFDocument3 pagesDS Pressure Transmitter PDFadrian bargasNo ratings yet
- Control System Configuration PDFDocument2 pagesControl System Configuration PDFjuliunNo ratings yet
- Scada System Software RequirementsDocument21 pagesScada System Software RequirementsadactivatorNo ratings yet
- PLC FundamentalsDocument42 pagesPLC Fundamentalsshivang patelNo ratings yet
- Process Control Design and DOF AnalysisDocument34 pagesProcess Control Design and DOF Analysisjosejuanramos100% (1)
- PLC Fundamentals Terminology PLC TutorialDocument23 pagesPLC Fundamentals Terminology PLC Tutorialrlnandha_2006No ratings yet
- Buckbee Process Control Basics FREE Chapter5Document29 pagesBuckbee Process Control Basics FREE Chapter5Göktug AhunbayNo ratings yet
- PLC ProjectsDocument12 pagesPLC Projectssheraaz87No ratings yet
- Modbus FAQDocument5 pagesModbus FAQspoof183No ratings yet
- ModBUS Communication Protocol v2 - 5 GBDocument12 pagesModBUS Communication Protocol v2 - 5 GBnntuan03100% (2)
- Pac 8000Document191 pagesPac 8000matteo.magriniNo ratings yet
- RostanCAN/CANopen To EtherCAT Gateways: Requirements and SolutionsDocument7 pagesRostanCAN/CANopen To EtherCAT Gateways: Requirements and SolutionsdracunciliasizNo ratings yet
- Castillo Reaction Paper PLC and SCADADocument2 pagesCastillo Reaction Paper PLC and SCADALaurence CastilloNo ratings yet
- Pds Deltav Sis CslsDocument57 pagesPds Deltav Sis Cslsrogelio surcoNo ratings yet
- PLC Interview Questions: 1. What Is The RS LINX Software Used For?Document5 pagesPLC Interview Questions: 1. What Is The RS LINX Software Used For?Pradip ChauhanNo ratings yet
- SIAD Engineering ASU LeaderDocument8 pagesSIAD Engineering ASU LeaderFarshad AsgariNo ratings yet
- A Classification Framework For Automated Control Code GenerationDocument23 pagesA Classification Framework For Automated Control Code GenerationalbertuchisNo ratings yet
- Plantpax Process Automation Solution For Oil and GasDocument24 pagesPlantpax Process Automation Solution For Oil and GaszkaticNo ratings yet
- Distributed Control System Interview Questions - DCS Engineer QuestionsDocument22 pagesDistributed Control System Interview Questions - DCS Engineer Questionsahmed messallamNo ratings yet
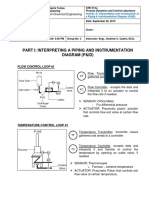
- Part I: Interpreting A Piping and Instrumentation Diagram (P&Id)Document4 pagesPart I: Interpreting A Piping and Instrumentation Diagram (P&Id)France CruzNo ratings yet
- Elster-Instromet M2000 FCDocument0 pagesElster-Instromet M2000 FCsaid_rahmansyah4750No ratings yet
- Instrumentation System DesignDocument138 pagesInstrumentation System DesignSS TripathyNo ratings yet
- 0-Gist of Industrial NetworkingDocument12 pages0-Gist of Industrial NetworkingsuritataNo ratings yet
- CIT - 223 (Computer Networks) - QsDocument30 pagesCIT - 223 (Computer Networks) - QsZabii ZNo ratings yet
- Phasing in DCS MigrationDocument4 pagesPhasing in DCS MigrationpanchoganchoNo ratings yet
- OPC & NetworkingDocument60 pagesOPC & NetworkingAnil Nair100% (1)
- Honeywell Experion System For Teaching Purposes: Year 2013Document60 pagesHoneywell Experion System For Teaching Purposes: Year 2013koushikNo ratings yet
- DCS Course by Ahmed SabriDocument48 pagesDCS Course by Ahmed SabriAmany MoemenNo ratings yet
- Vtu LD NotesDocument63 pagesVtu LD NotesPPatilNo ratings yet
- SCADA System Design Standards for Optimized Control and MaintenanceDocument18 pagesSCADA System Design Standards for Optimized Control and Maintenanceatif_aman123No ratings yet
- Difference between DCS & PLC SystemsDocument9 pagesDifference between DCS & PLC Systemsmtrj59No ratings yet
- Process Control SystemDocument8 pagesProcess Control SystemIno JohannisNo ratings yet
- CCST Conversions Document PDFDocument5 pagesCCST Conversions Document PDFMichael GaydosNo ratings yet
- 00-Summary of Itb (Data Sheet) - R1Document2 pages00-Summary of Itb (Data Sheet) - R1Athanasius Kurniawan Prasetyo AdiNo ratings yet
- Lab 1: PLC Hardware FamiliarizationDocument5 pagesLab 1: PLC Hardware FamiliarizationTee CubeNo ratings yet
- AWTP SCADA and Electrical Drawings IFTDocument55 pagesAWTP SCADA and Electrical Drawings IFTzmNo ratings yet
- s21 s22 s36 s47 s64Document2 pagess21 s22 s36 s47 s64hyreepktNo ratings yet
- Underwater Optical Wireless CommunicationDocument30 pagesUnderwater Optical Wireless CommunicationPhuc HoangNo ratings yet
- Vendor Sample ProjectsDocument10 pagesVendor Sample ProjectsRrhh EstNo ratings yet
- Layered architectures and application of TCP/IP protocolsDocument27 pagesLayered architectures and application of TCP/IP protocolsManish KumarNo ratings yet
- Distributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981From EverandDistributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981No ratings yet
- Process Control and Industrial Automation Complete Self-Assessment GuideFrom EverandProcess Control and Industrial Automation Complete Self-Assessment GuideNo ratings yet
- Count CharDocument1 pageCount CharbharathshajiNo ratings yet
- Synchronous Data-Transmission SystemsDocument24 pagesSynchronous Data-Transmission SystemsbharathshajiNo ratings yet
- Mobile Satellite Service Report Provides OverviewDocument13 pagesMobile Satellite Service Report Provides OverviewzgxfsbjbnNo ratings yet
- Introduction To Differential EquationsDocument3 pagesIntroduction To Differential EquationsZarqa MiraniNo ratings yet
- Lec09 NotesDocument5 pagesLec09 NotesbharathshajiNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Marsden-Basic Steps in Designing A Space MissionDocument18 pagesMarsden-Basic Steps in Designing A Space MissionbharathshajiNo ratings yet
- LVDT Linear Variable Displacement Transducers/TransformersDocument17 pagesLVDT Linear Variable Displacement Transducers/TransformersbharathshajiNo ratings yet
- Questions To Ask During HR InterviewDocument2 pagesQuestions To Ask During HR InterviewbharathshajiNo ratings yet
- ISRO MissionsDocument21 pagesISRO MissionsbharathshajiNo ratings yet
- FormulasDocument5 pagesFormulasapi-3708181No ratings yet
- Watchdog TimersDocument1 pageWatchdog TimersbharathshajiNo ratings yet
- ABSTRACTDocument1 pageABSTRACTbharathshajiNo ratings yet
- Balino, Shedina D. Beed 2-CDocument5 pagesBalino, Shedina D. Beed 2-CSHEDINA BALINONo ratings yet
- Telescopic sight basics and reticle typesDocument18 pagesTelescopic sight basics and reticle typesKoala LumpurNo ratings yet
- Fc6a Plus (MQTT)Document44 pagesFc6a Plus (MQTT)black boxNo ratings yet
- A2 Slot CAT2 QPDocument1 pageA2 Slot CAT2 QPSeverus SnapeNo ratings yet
- A. Soriano Corporation 2009 Annual Stockholders Meeting Notice and AgendaDocument47 pagesA. Soriano Corporation 2009 Annual Stockholders Meeting Notice and AgendaGabriel uyNo ratings yet
- VnDoc - Tải tài liệu, văn bản pháp luật, biểu mẫu miễn phíDocument7 pagesVnDoc - Tải tài liệu, văn bản pháp luật, biểu mẫu miễn phíStranger NonameNo ratings yet
- Textbook List for Sri Kanchi Mahaswami Vidya Mandir 2020-21Document13 pagesTextbook List for Sri Kanchi Mahaswami Vidya Mandir 2020-21drsubramanianNo ratings yet
- BDSM - Google SearchDocument1 pageBDSM - Google SearchporcogalliardsgfNo ratings yet
- Organizational Structure and ProfilesDocument178 pagesOrganizational Structure and ProfilesImran Khan NiaziNo ratings yet
- GF - 4 - GF - 6 - 790 700 337 - 01 - enDocument2 pagesGF - 4 - GF - 6 - 790 700 337 - 01 - enAdrianNo ratings yet
- Viavi: Variable Optical Attenuators (mVOA-C1)Document6 pagesViavi: Variable Optical Attenuators (mVOA-C1)gwNo ratings yet
- Generate power from solar roof tilesDocument4 pagesGenerate power from solar roof tilesshalinthNo ratings yet
- How To Think Like Leonarda Da VinciDocument313 pagesHow To Think Like Leonarda Da VinciAd Las94% (35)
- Research Proposal of SheepDocument37 pagesResearch Proposal of SheepDabalo Garama67% (3)
- Register for a WordPress account in 5 easy stepsDocument5 pagesRegister for a WordPress account in 5 easy stepsPutriNo ratings yet
- Types of Managers and Management Styles: Popmt@uoradea - Ro Dpop@uoradeaDocument7 pagesTypes of Managers and Management Styles: Popmt@uoradea - Ro Dpop@uoradeaJimnadominicNo ratings yet
- ACI-439.3R-91 Mechanical Connections of Reinforcing BarsDocument16 pagesACI-439.3R-91 Mechanical Connections of Reinforcing BarsMichi AGNo ratings yet
- Final Koni FinalDocument124 pagesFinal Koni FinalBinod BoharaNo ratings yet
- Instructions: Hmems80 2020 Semester 1 Assignment 01 (Unique Number: 873964) Due Date: 9 March 2020Document8 pagesInstructions: Hmems80 2020 Semester 1 Assignment 01 (Unique Number: 873964) Due Date: 9 March 2020Matshele SerageNo ratings yet
- How To Set Up Simulator Ard MMDocument12 pagesHow To Set Up Simulator Ard MMJayakrishnaNo ratings yet
- BF 00571142Document1 pageBF 00571142Tymoteusz DziedzicNo ratings yet
- PCH (R-407C) SeriesDocument53 pagesPCH (R-407C) SeriesAyman MufarehNo ratings yet
- SATA Product Manual: Standard ModelsDocument32 pagesSATA Product Manual: Standard ModelsEdy AprilyantoNo ratings yet
- Advantages and Disadvantages of EscalatorsDocument2 pagesAdvantages and Disadvantages of EscalatorsMuhammad Nabill Jeffri100% (1)
- TAURI User ManualDocument23 pagesTAURI User ManualChris Sad LHNo ratings yet
- AdultChatDkz - ENGLISH - Freelance Worker-SignedDocument5 pagesAdultChatDkz - ENGLISH - Freelance Worker-SignedDanielNo ratings yet
- Off-Highway 6600 Series Transmission SpecsDocument2 pagesOff-Highway 6600 Series Transmission SpecsIng Dimatiguz0% (1)
- Mastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesDocument48 pagesMastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesSaul Saldana LoyaNo ratings yet
- In The Shadow of The CathedralDocument342 pagesIn The Shadow of The CathedralJoy MenezesNo ratings yet
- Industrial Wire Cutting Machine: A Senior Capstone Design ProjectDocument17 pagesIndustrial Wire Cutting Machine: A Senior Capstone Design ProjectTruta IonutNo ratings yet