You might also like
- Lap Trinh Robot Tu Dong Voi PIC16F877ADocument14 pagesLap Trinh Robot Tu Dong Voi PIC16F877ATruonglana100% (5)
- Giao tiếp máy tính với vi điều khiển Pic18F4550 qua cổng USBDocument83 pagesGiao tiếp máy tính với vi điều khiển Pic18F4550 qua cổng USBHQ MU100% (1)
- Asm - Giai Đo N 1 (Ac18102)Document24 pagesAsm - Giai Đo N 1 (Ac18102)Béo TiếnNo ratings yet
- Final ReportDocument89 pagesFinal ReportPhú NguyễnNo ratings yet
- Báo Cáo VXLDocument22 pagesBáo Cáo VXLVăn Nam NgôNo ratings yet
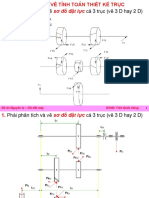
- 4 - Tinh Toan Thiet Ke TRUCDocument7 pages4 - Tinh Toan Thiet Ke TRUCtrungNo ratings yet
- L298 Bandich TrietnguyenDocument12 pagesL298 Bandich Trietnguyenanhtuands100% (1)
- C++ BCVTDocument186 pagesC++ BCVTTruong Quoc VuongNo ratings yet
- Huong Dan Su Dung Bo PID Mem Step7Document15 pagesHuong Dan Su Dung Bo PID Mem Step7Hải Cao Trần100% (1)
- định vị trong robot tự hànhDocument5 pagesđịnh vị trong robot tự hànhTú LêNo ratings yet
- Orcad 2 - Ve Mach in Bang LayoutDocument38 pagesOrcad 2 - Ve Mach in Bang Layoutapi-3765772100% (5)
- Sử dụng PSIM mô phỏng mạch Điện tử côngDocument8 pagesSử dụng PSIM mô phỏng mạch Điện tử côngmatnhungNo ratings yet
- Chương 5. Bộ Truyền Bánh RăngDocument45 pagesChương 5. Bộ Truyền Bánh RăngTien AnhNo ratings yet
- Bai 1Document14 pagesBai 1Phạm Đức HuyNo ratings yet
- Bài Kiểm tra TH bài số 1. K13Document6 pagesBài Kiểm tra TH bài số 1. K13Nguyễn Nam0% (1)
- ƯNG DỤNG TỐC ĐỘ KẾ ĐIỆN TỪDocument2 pagesƯNG DỤNG TỐC ĐỘ KẾ ĐIỆN TỪDung LeeNo ratings yet
- Báo Cáo Đ Án 2Document26 pagesBáo Cáo Đ Án 2Nguyễn Công HảiNo ratings yet
- Thiết kế bộ điều khiển PID mờ choDocument26 pagesThiết kế bộ điều khiển PID mờ choKa TrầnNo ratings yet
- Theo Dõi Hành Vi C A Ngư I Cao Tu I - S D NG CameraDocument87 pagesTheo Dõi Hành Vi C A Ngư I Cao Tu I - S D NG CameraMan EbookNo ratings yet
- Bài 1 Tổng quan xử lý ảnh viễn thámDocument64 pagesBài 1 Tổng quan xử lý ảnh viễn thámKio ZenxNo ratings yet
- BTL VI Xu LyDocument30 pagesBTL VI Xu LyledangtuanbkNo ratings yet
- Thiết kế IC đồng hồ sốDocument56 pagesThiết kế IC đồng hồ sốHà GiangNo ratings yet
- Bai Tap Dung SaiDocument202 pagesBai Tap Dung SaiLe Thanh HaiNo ratings yet
- Me4506 Đa TKHTCK CĐTTMDocument8 pagesMe4506 Đa TKHTCK CĐTTMPhong Dang0% (1)
- BÁO CÁO THỰC TẬPDocument22 pagesBÁO CÁO THỰC TẬPVũ Quang TiệpNo ratings yet
- IMUDocument85 pagesIMUnguyenhuu43100% (3)
- ĐỀ CƯƠNG TỔNG HỢP KỸ THUẬT ĐIỀU KHIỂN TỰ ĐỘNGDocument86 pagesĐỀ CƯƠNG TỔNG HỢP KỸ THUẬT ĐIỀU KHIỂN TỰ ĐỘNGPHÚC HỒ ĐẮCNo ratings yet
- Báo cáo tiểu luậnDocument12 pagesBáo cáo tiểu luậnbinhxuanvuiNo ratings yet
- Nguyen Ly Hoat Dong EncoderDocument6 pagesNguyen Ly Hoat Dong EncodersunhuynhNo ratings yet
- Bai Giang Ve EncoderDocument28 pagesBai Giang Ve EncodertrinhdieuhvktqsNo ratings yet
- EncoderDocument10 pagesEncoderVũ Đình Song ToànNo ratings yet
- EncoderDocument43 pagesEncoderminhtrieu999No ratings yet
- EncoderDocument4 pagesEncoderapi-656115276No ratings yet
- EncoderDocument2 pagesEncoderToản Nguyễn ĐắcNo ratings yet
- EncoderDocument38 pagesEncoderPhạm Hữu ThanhNo ratings yet
- P3e Encoder SensorsDocument18 pagesP3e Encoder SensorsNgo Huu NhanNo ratings yet
- Baocao Do An I Nguyen Hoai Nam 20202Document36 pagesBaocao Do An I Nguyen Hoai Nam 20202KMJ OfficialNo ratings yet
- SLIDE THUYẾT TRÌNH - Tìm hiểu về Encoder và ResolverDocument27 pagesSLIDE THUYẾT TRÌNH - Tìm hiểu về Encoder và Resolver64Vũ Hùng ThắngNo ratings yet
- Nhóm 11 Bài 2Document14 pagesNhóm 11 Bài 2Lương Minh Hiếu50% (2)
- Encoder Doc 136 PDFDocument16 pagesEncoder Doc 136 PDFNguyễn Thanh BìnhNo ratings yet
- PID Servo AvrDocument22 pagesPID Servo AvrPoint To PointNo ratings yet
- Pid With AvrDocument16 pagesPid With AvrmaiduchuyNo ratings yet
- Nhóm 6 - bt2Document8 pagesNhóm 6 - bt2Ly Nguyễn HươngNo ratings yet
- BTVN So 2 CNC Nhom7Document7 pagesBTVN So 2 CNC Nhom7Ly Nguyễn HươngNo ratings yet
- Động Cơ EncorderDocument9 pagesĐộng Cơ EncorderNinh Nguyễn CôngNo ratings yet
- Nhóm 14 Cảm Biến Tốc ĐộDocument7 pagesNhóm 14 Cảm Biến Tốc ĐộGia BảoNo ratings yet
- Điều khiển động cơ Servo-dùng PIDDocument20 pagesĐiều khiển động cơ Servo-dùng PIDkimthucddNo ratings yet
- 345502465 Đo va điều khiển tốc độ động cơ dung PLC S7 1200Document18 pages345502465 Đo va điều khiển tốc độ động cơ dung PLC S7 1200Nguyễn Xuân ThanhNo ratings yet
- BTVN - so - 2 - CNC - Nhom7-đã chuyển đổiDocument7 pagesBTVN - so - 2 - CNC - Nhom7-đã chuyển đổiLy Nguyễn HươngNo ratings yet
- Do Toc Do Dong Co Dung Cam Bien IR FCDocument7 pagesDo Toc Do Dong Co Dung Cam Bien IR FCDuc Luu VuNo ratings yet
- Đo và điều khiển tốc độ động cơ dùng PLC S7-1200Document17 pagesĐo và điều khiển tốc độ động cơ dùng PLC S7-1200Hiền Nguyễn60% (5)
- Bai 4 - Do Van Toc Vong Quay Va Goc QuayDocument33 pagesBai 4 - Do Van Toc Vong Quay Va Goc QuaytayantrungquochpNo ratings yet
- EncodeDocument2 pagesEncodeHoàn PhúcNo ratings yet
- ĐO CHUYỂN ĐỘNG DÙNG ENCODERDocument3 pagesĐO CHUYỂN ĐỘNG DÙNG ENCODERĐức Dũng100% (1)
- Cảm biến tốc độDocument35 pagesCảm biến tốc độNgô ThiêmNo ratings yet
- BaoCaoLab1 Nhom2Document31 pagesBaoCaoLab1 Nhom2Anh ĐứcNo ratings yet
- 01 T7 GioiThieuPhanCungDocument23 pages01 T7 GioiThieuPhanCungPháp Sư Giấu MặtNo ratings yet
- Encoder 7546Document37 pagesEncoder 7546Xuân Phú Vũ LâmNo ratings yet
- Thiết Kế Đồng Hồ Số Chạy Bằng Ic SốDocument9 pagesThiết Kế Đồng Hồ Số Chạy Bằng Ic SốTran Ngoc DucNo ratings yet
- Báo cáo thiết kế hệ thống nhúngDocument19 pagesBáo cáo thiết kế hệ thống nhúngQuang PhạmNo ratings yet