You might also like
- Biggest Lessons of 20 Years InvestingDocument227 pagesBiggest Lessons of 20 Years InvestingRohi Shetty100% (5)
- Sav 5446Document21 pagesSav 5446Michael100% (2)
- ME-458 Turbomachinery: Review of Basic Laws and Design AspectsDocument113 pagesME-458 Turbomachinery: Review of Basic Laws and Design AspectsAneeq Raheem0% (1)
- Finite Different Method - Heat Transfer - Using MatlabDocument27 pagesFinite Different Method - Heat Transfer - Using MatlabLe Cong LapNo ratings yet
- Hydraulic Grade Line Analysis Manual SectionDocument4 pagesHydraulic Grade Line Analysis Manual Sectionisquare77No ratings yet
- Metamorphic Rocks ImagesDocument7 pagesMetamorphic Rocks Imagesapi-289985616100% (1)
- Surface Pressure Distribution Over A CylinderDocument5 pagesSurface Pressure Distribution Over A CylinderHari Manoj Ram GandrothuNo ratings yet
- CFD NotesDocument155 pagesCFD NotesAjit ChandranNo ratings yet
- Fluid Mechanics QtnsDocument3 pagesFluid Mechanics QtnsAnonymous NV1AeWXEo100% (1)
- Navier-Stokes Derivation in Cylindrical CoordinatesDocument11 pagesNavier-Stokes Derivation in Cylindrical Coordinatespraxie90% (62)
- CFD Assignment 1 (30052157)Document15 pagesCFD Assignment 1 (30052157)Nimesh IshankaNo ratings yet
- ADVANCED METHODS FOR PRACTICAL APPLICATIONS IN FLUID MECHANICS by Steven A Jones PDFDocument243 pagesADVANCED METHODS FOR PRACTICAL APPLICATIONS IN FLUID MECHANICS by Steven A Jones PDFMohamad Sleiman100% (1)
- Cfdcodes in FortranDocument309 pagesCfdcodes in FortranRamaleela Kannan14% (7)
- Solving Navier-Stokes PDE via FDMDocument13 pagesSolving Navier-Stokes PDE via FDMMuhammad_Noman_Hasan33% (6)
- OpenFOAM Tutorial Free Surface Tutorial Using InterFoam and RasInterFoam Hassan - Hemida - VOFDocument31 pagesOpenFOAM Tutorial Free Surface Tutorial Using InterFoam and RasInterFoam Hassan - Hemida - VOFAghajani100% (1)
- Introduction to Finite Difference Method and Fundamentals of CFDDocument259 pagesIntroduction to Finite Difference Method and Fundamentals of CFDHemaprasanth67% (3)
- Quezon City Department of The Building OfficialDocument2 pagesQuezon City Department of The Building OfficialBrightNotes86% (7)
- UW Computational-Finance & Risk Management Brochure Final 080613Document2 pagesUW Computational-Finance & Risk Management Brochure Final 080613Rajel MokNo ratings yet
- Turbulence Modeling (Dr. Alam Wardag)Document50 pagesTurbulence Modeling (Dr. Alam Wardag)Shehryar AliNo ratings yet
- Pressure Velocity Couplings in Steady FlowsDocument35 pagesPressure Velocity Couplings in Steady FlowssubbaraocherukuriNo ratings yet
- Lectures On Computational Fluid DynamicsDocument205 pagesLectures On Computational Fluid Dynamicsalakozai Khan100% (1)
- Introduction To CFD SPRING 2016Document36 pagesIntroduction To CFD SPRING 2016bookdigitNo ratings yet
- Rarefied Gas Dynamics - DSMC CourseDocument50 pagesRarefied Gas Dynamics - DSMC CourseyicdooNo ratings yet
- Development of A Solver For The Heat Equation Using MATLABDocument14 pagesDevelopment of A Solver For The Heat Equation Using MATLABManan Academy100% (2)
- FLUID MECHANICS FUNDAMENTALS AND APPLICATIONSDocument79 pagesFLUID MECHANICS FUNDAMENTALS AND APPLICATIONSMohd Ismail Mohd IsninNo ratings yet
- Lid Driven FlowDocument8 pagesLid Driven Flowmanoj0071991No ratings yet
- 2D Lid Diven Cavity Final Report PDFDocument24 pages2D Lid Diven Cavity Final Report PDFVivek JoshiNo ratings yet
- Lid Driven Cavity CFD Simulation Report by S N TopannavarDocument127 pagesLid Driven Cavity CFD Simulation Report by S N TopannavarAkshay PatilNo ratings yet
- Lid Driven Cavity Flow OK Final EldwinDocument33 pagesLid Driven Cavity Flow OK Final Eldwineldwin_dj7216No ratings yet
- Ansys: Flow in A Lid-Driven CavityDocument24 pagesAnsys: Flow in A Lid-Driven CavityAdil Javed Chaudhary100% (1)
- 2-D Navier Stokes Solution Lid-Driven Cavity Flow: V U HX, Yl I + V HX, Yl JDocument8 pages2-D Navier Stokes Solution Lid-Driven Cavity Flow: V U HX, Yl I + V HX, Yl JAmoul DhahriNo ratings yet
- Lecture 16 Lid Driven Cavity FlowDocument23 pagesLecture 16 Lid Driven Cavity FlowDesh DeepakNo ratings yet
- 07-Mixing and Chemical ReactionsDocument27 pages07-Mixing and Chemical ReactionsShundeNo ratings yet
- Lid Driven CavityDocument24 pagesLid Driven CavityShashank MishraNo ratings yet
- Flow Past a Circular Cylinder Using Abaqus/CFDDocument15 pagesFlow Past a Circular Cylinder Using Abaqus/CFDTodor Ivanov YankovNo ratings yet
- Transient Compressible Flow Inside Convergent Divergent NozzleDocument45 pagesTransient Compressible Flow Inside Convergent Divergent NozzlelitonNo ratings yet
- Thesis Lid DrivenDocument145 pagesThesis Lid DrivenEddieq100% (1)
- 01 ANSYS FLUENT Tutorial - Position Dependent Porous Media PDFDocument8 pages01 ANSYS FLUENT Tutorial - Position Dependent Porous Media PDFmrpcu0% (1)
- Fluid Mechanics, Turbulent Flow and Turbulence ModelingDocument247 pagesFluid Mechanics, Turbulent Flow and Turbulence ModelingAhmad GhafouriNo ratings yet
- Unit 1 Variable Head Type FlowmetersDocument22 pagesUnit 1 Variable Head Type FlowmetersShivam VishvakarmaNo ratings yet
- Cavity Lid DriveDocument4 pagesCavity Lid DrivealexNo ratings yet
- Module 6Document351 pagesModule 6Chien NguyenNo ratings yet
- Finite Volume MethodDocument35 pagesFinite Volume MethodMohammad Reza100% (1)
- CFD Project ProposalDocument2 pagesCFD Project Proposalanubhav_singh_mbaNo ratings yet
- Numerical Simulation of Single Phase Flow With Eulerian ModelDocument3 pagesNumerical Simulation of Single Phase Flow With Eulerian ModelBeatriz BarbozaNo ratings yet
- Navier StokesDocument36 pagesNavier Stokesvincent02hk_57881301No ratings yet
- QUBE-Servo Inverted Pendulum ModelingDocument4 pagesQUBE-Servo Inverted Pendulum ModelingByron Xavier Lima CedilloNo ratings yet
- Tecplot Animation InstructionDocument2 pagesTecplot Animation Instructiondiaz70No ratings yet
- SSRN Id3671441Document9 pagesSSRN Id3671441Abhiroop VaddiparthiNo ratings yet
- Timothy Ganesan Paper A LAGRE EDDY SIMULATION (LES) CODE FOR TURBULENT FLOWS: VALIDATION AGAINST A TURBULENT FLOW AROUND A SINGLE SURFACE-MOUNTED CUBICLE OBSTACLE EXPERIMENT. Symposium (2008) - AccDocument8 pagesTimothy Ganesan Paper A LAGRE EDDY SIMULATION (LES) CODE FOR TURBULENT FLOWS: VALIDATION AGAINST A TURBULENT FLOW AROUND A SINGLE SURFACE-MOUNTED CUBICLE OBSTACLE EXPERIMENT. Symposium (2008) - Acctim.ganesan8668No ratings yet
- Other - Comparison of Pressure-Velocity Coupling Schemes For 2D Flow (Audi)Document4 pagesOther - Comparison of Pressure-Velocity Coupling Schemes For 2D Flow (Audi)me_dejoelcamion1946No ratings yet
- High-Order Finite Difference Schemes For Incompressible FlowsDocument24 pagesHigh-Order Finite Difference Schemes For Incompressible Flowslalrajnesh1102No ratings yet
- N-S Equations: Deriving Pressure Poisson EquationDocument3 pagesN-S Equations: Deriving Pressure Poisson EquationSaumya SinhaNo ratings yet
- JCP - 1 PrinciplDocument35 pagesJCP - 1 PrinciplVrayan AyalaNo ratings yet
- 312H Project - FinalDocument39 pages312H Project - Finalpmd5102100% (3)
- Aeroelasticity Calculations Using Finite Element MethodDocument7 pagesAeroelasticity Calculations Using Finite Element Methodr1733No ratings yet
- Finite Element Analysis of Navier-Stokes EquationsDocument28 pagesFinite Element Analysis of Navier-Stokes EquationsSatyen RamaniNo ratings yet
- Analysis of Projection Methods for Incompressible Fluids with MicrostructureDocument36 pagesAnalysis of Projection Methods for Incompressible Fluids with MicrostructureMuhammad Sabeel KhanNo ratings yet
- Analysis and Approximation of A Vorticity-Velocity-Pressure Formulation For The Oseen EquationsDocument30 pagesAnalysis and Approximation of A Vorticity-Velocity-Pressure Formulation For The Oseen EquationsYuliza Carolina Capuñay SiesquénNo ratings yet
- Department of Aeronautical Engineering: Prepared by Irish Angelin SDocument26 pagesDepartment of Aeronautical Engineering: Prepared by Irish Angelin SAnonymous drYNHeNo ratings yet
- Modified Fractional-Step Methods For The Navier-Stokes EquationsDocument14 pagesModified Fractional-Step Methods For The Navier-Stokes EquationsWaqas Bin FaatehNo ratings yet
- Comparison of Simple - and Piso-Type Algorithms For Transient FlowsDocument25 pagesComparison of Simple - and Piso-Type Algorithms For Transient FlowsmacromoleculeNo ratings yet
- CFD Solution Algorithms: Explicit and Implicit MethodsDocument94 pagesCFD Solution Algorithms: Explicit and Implicit MethodsMEET PATELNo ratings yet
- Mixed Analytical/numerical Method Applied To The Low Reynolds Number K-Epsilon Turbulence ModelDocument8 pagesMixed Analytical/numerical Method Applied To The Low Reynolds Number K-Epsilon Turbulence ModelmojiryhamidNo ratings yet
- 3) Stages of Group Development - To StudsDocument15 pages3) Stages of Group Development - To StudsDhannesh SweetAngelNo ratings yet
- Ralf Behrens: About The ArtistDocument3 pagesRalf Behrens: About The ArtistStavros DemosthenousNo ratings yet
- Self-Assessment On Accountability: I. QuestionsDocument2 pagesSelf-Assessment On Accountability: I. QuestionsAjit Kumar SahuNo ratings yet
- Craft's Folder StructureDocument2 pagesCraft's Folder StructureWowNo ratings yet
- Berry B Brey Part IDocument49 pagesBerry B Brey Part Ikalpesh_chandakNo ratings yet
- Introduction To Elective DesignDocument30 pagesIntroduction To Elective Designabdullah 3mar abou reashaNo ratings yet
- As 1769-1975 Welded Stainless Steel Tubes For Plumbing ApplicationsDocument6 pagesAs 1769-1975 Welded Stainless Steel Tubes For Plumbing ApplicationsSAI Global - APACNo ratings yet
- 3 Intro To Ozone LaundryDocument5 pages3 Intro To Ozone LaundrynavnaNo ratings yet
- Palmetto Bay's Ordinance On Bird RefugeDocument4 pagesPalmetto Bay's Ordinance On Bird RefugeAndreaTorresNo ratings yet
- Econometrics Chapter 1 7 2d AgEc 1Document89 pagesEconometrics Chapter 1 7 2d AgEc 1Neway AlemNo ratings yet
- Cib DC22692Document16 pagesCib DC22692Ashutosh SharmaNo ratings yet
- Debentures Issued Are SecuritiesDocument8 pagesDebentures Issued Are Securitiesarthimalla priyankaNo ratings yet
- COVID-19's Impact on Business PresentationsDocument2 pagesCOVID-19's Impact on Business PresentationsRetmo NandoNo ratings yet
- Project The Ant Ranch Ponzi Scheme JDDocument7 pagesProject The Ant Ranch Ponzi Scheme JDmorraz360No ratings yet
- Collaboration Live User Manual - 453562037721a - en - US PDFDocument32 pagesCollaboration Live User Manual - 453562037721a - en - US PDFIvan CvasniucNo ratings yet
- Dell 1000W UPS Spec SheetDocument1 pageDell 1000W UPS Spec SheetbobNo ratings yet
- UKIERI Result Announcement-1Document2 pagesUKIERI Result Announcement-1kozhiiiNo ratings yet
- Gates em Ingles 2010Document76 pagesGates em Ingles 2010felipeintegraNo ratings yet
- CORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Document2 pagesCORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Sanjeev MansotraNo ratings yet
- Cercado VsDocument1 pageCercado VsAnn MarieNo ratings yet
- Supplier Quality Requirement Form (SSQRF) : Inspection NotificationDocument1 pageSupplier Quality Requirement Form (SSQRF) : Inspection Notificationsonnu151No ratings yet
- CASE DigeSTDocument2 pagesCASE DigeSTZepht BadillaNo ratings yet
- Civil Aeronautics BoardDocument2 pagesCivil Aeronautics BoardJayson AlvaNo ratings yet
- An Overview of Tensorflow + Deep learning 沒一村Document31 pagesAn Overview of Tensorflow + Deep learning 沒一村Syed AdeelNo ratings yet
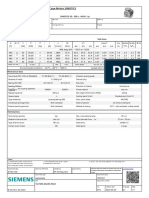
- 1LE1503-2AA43-4AA4 Datasheet enDocument1 page1LE1503-2AA43-4AA4 Datasheet enAndrei LupuNo ratings yet