You might also like
- Lect 26 Rural Marketing CD Consumer Durables Industry in IndiaDocument0 pagesLect 26 Rural Marketing CD Consumer Durables Industry in IndiaSiddharth SinghNo ratings yet
- Strategic Analysis of InfosysDocument9 pagesStrategic Analysis of Infosysanubhavjain2No ratings yet
- Robinhood Case StudyDocument2 pagesRobinhood Case StudyUdaya ChoudaryNo ratings yet
- How To Write A Great Research Paper by Simon Peyton JonesDocument46 pagesHow To Write A Great Research Paper by Simon Peyton JonesrazorazNo ratings yet
- 5123 - 2 - Placement Policy 2013 HighlightedDocument13 pages5123 - 2 - Placement Policy 2013 HighlightedSiddharth SinghNo ratings yet
- Chapter 1: Newly Built Olympic Sports FacilitiesDocument3 pagesChapter 1: Newly Built Olympic Sports FacilitiesSiddharth SinghNo ratings yet
- Upsc (Ies) 11111Document4 pagesUpsc (Ies) 11111mcnsitcseNo ratings yet
- 14 PDFDocument7 pages14 PDFSiddharth SinghNo ratings yet
- 8317 LL Bean SQL Server 2000 Case StudyDocument8 pages8317 LL Bean SQL Server 2000 Case StudySiddharth SinghNo ratings yet
- AMCAT Test SyllabusDocument9 pagesAMCAT Test SyllabusNetrapal RajputNo ratings yet
- 6546 - 1 - M.tech Cseit Eep SessionsDocument9 pages6546 - 1 - M.tech Cseit Eep SessionsSiddharth SinghNo ratings yet
- Women Disability HaryanaDocument12 pagesWomen Disability HaryanaSiddharth SinghNo ratings yet
- Academic and Examination RulesDocument4 pagesAcademic and Examination RulesSiddharth SinghNo ratings yet
- Hweco515Document2 pagesHweco515Siddharth SinghNo ratings yet
- Ac Ademic Calend Ar For Session 2012-2013: Spring Term (Term-Ii) 2012-13Document2 pagesAc Ademic Calend Ar For Session 2012-2013: Spring Term (Term-Ii) 2012-13Prabhat KumarNo ratings yet
- Strategic Cost AnalysisDocument24 pagesStrategic Cost AnalysisBusiness Expert Press100% (10)
- 2Document3 pages2Siddharth SinghNo ratings yet
- NoroomDocument59 pagesNoroomSiddharth SinghNo ratings yet
- University of Northern IowaDocument12 pagesUniversity of Northern IowaSiddharth SinghNo ratings yet
- Ip Eco515 Managerial EconomicsDocument13 pagesIp Eco515 Managerial EconomicsSiddharth SinghNo ratings yet
- 01 Bharati RayDocument16 pages01 Bharati RaySiddharth SinghNo ratings yet
- 2Document3 pages2Siddharth SinghNo ratings yet
- Women EmpowermentDocument39 pagesWomen Empowermentm_dattaias100% (1)
- 09 Chapter 2Document61 pages09 Chapter 2tausifp_4No ratings yet
- Violence Against Women IndiaDocument83 pagesViolence Against Women Indiajawwad ahmed khan100% (1)
- Ip Mgt516 Research MethodologyDocument10 pagesIp Mgt516 Research MethodologySiddharth SinghNo ratings yet
- Violence Against Women IndiaDocument83 pagesViolence Against Women Indiajawwad ahmed khan100% (1)
- The Tribune, Chandigarh, India - Main NewsDocument3 pagesThe Tribune, Chandigarh, India - Main NewsSiddharth SinghNo ratings yet
- Rr1002b40 Assignment-1 Mgt516 Research MethodologyDocument13 pagesRr1002b40 Assignment-1 Mgt516 Research MethodologyRaja LpuNo ratings yet
- Violence Against Women IndiaDocument83 pagesViolence Against Women Indiajawwad ahmed khan100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hafsa 131003112307 Phpapp02 PDFDocument47 pagesHafsa 131003112307 Phpapp02 PDFLevale XrNo ratings yet
- Airbase 13671Document6 pagesAirbase 13671ssarangNo ratings yet
- Modicom M340Document267 pagesModicom M340Davis AcuñaNo ratings yet
- SAP Fiori Launchpad For Developers - Architecture OverviewDocument12 pagesSAP Fiori Launchpad For Developers - Architecture OverviewsanasriNo ratings yet
- Removing and Installing Underground Storage TanksDocument7 pagesRemoving and Installing Underground Storage TanksM Waqas Habib100% (1)
- Charles Rennie MackintoshDocument14 pagesCharles Rennie MackintoshRadu Stefan100% (1)
- Sodium Bicarbonate Carbon CaptureDocument15 pagesSodium Bicarbonate Carbon CaptureDimitriNo ratings yet
- Lean Accounting PDFDocument303 pagesLean Accounting PDFAnushaNo ratings yet
- Comparative Study of MP Birla Cement and Other Brands Marketing MixDocument122 pagesComparative Study of MP Birla Cement and Other Brands Marketing MixduTyah seerionNo ratings yet
- Seedcake - New ScheduleDocument17 pagesSeedcake - New ScheduleJimmy CooperNo ratings yet
- Civil Engineering Laboratory Uitm Pahang, Kampus Jengka Highway Engineering ECG344 Open-Ended Lab OCTOBER 2020 - JANUARY 2021Document3 pagesCivil Engineering Laboratory Uitm Pahang, Kampus Jengka Highway Engineering ECG344 Open-Ended Lab OCTOBER 2020 - JANUARY 2021Adli Amin AmzukiNo ratings yet
- 50-Applicable Codes and StandardsDocument48 pages50-Applicable Codes and StandardsmohsenNo ratings yet
- Automatic Tank Gauging System PDFDocument2 pagesAutomatic Tank Gauging System PDFRahul DivakaranNo ratings yet
- Ece 230Document4 pagesEce 230JackNo ratings yet
- Arch 43465Document65 pagesArch 43465Jackson BergNo ratings yet
- D2.07 Non Segregated Phase Bus DuctsDocument3 pagesD2.07 Non Segregated Phase Bus DuctsSaraswatapalitNo ratings yet
- Cost of QualityDocument14 pagesCost of QualitySreenath HtaneersNo ratings yet
- Queensferry Crossing PresentationDocument7 pagesQueensferry Crossing PresentationGregor MackenzieNo ratings yet
- Telsinex Installation Guide Ver2.0Document46 pagesTelsinex Installation Guide Ver2.0Ludgério PedroNo ratings yet
- Manual de Servicio Ichem Velocity Rev DDocument271 pagesManual de Servicio Ichem Velocity Rev DJohny Ronald Gutierrez DelgadoNo ratings yet
- SMK BUKIT SENTOSA TINGKATAN 4 PEPERIKSAAN AKHIR TAHUN 2014 MARKING SCHEMEDocument7 pagesSMK BUKIT SENTOSA TINGKATAN 4 PEPERIKSAAN AKHIR TAHUN 2014 MARKING SCHEMEMohd Hairul Akmal Ab. AzizNo ratings yet
- LPTv4 Module 44 Penetration Testing Report AnalysisDocument12 pagesLPTv4 Module 44 Penetration Testing Report AnalysisShanky Verma SoniNo ratings yet
- Tee Cobre So EpcDocument1 pageTee Cobre So EpcAngel Rojas FrancoNo ratings yet
- Computer Mcqs1'Document34 pagesComputer Mcqs1'Imran SheikhNo ratings yet
- Optimized Induction Motor Design for Electrical VehiclesDocument12 pagesOptimized Induction Motor Design for Electrical Vehiclesmass72100% (1)
- Dbatu MisDocument1 pageDbatu Misgamingaao75No ratings yet
- eFI Fuel Systems: Draft OnlyDocument18 pageseFI Fuel Systems: Draft OnlyAmal TharakaNo ratings yet
- Non-powered Fiberglass Whips and MountsDocument2 pagesNon-powered Fiberglass Whips and MountsKateNo ratings yet
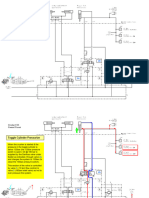
- Toggle Ram - CSS Ram Valve SetupDocument6 pagesToggle Ram - CSS Ram Valve Setupsassine khouryNo ratings yet
- PRV Spirax Sarco 25P - 25PADocument17 pagesPRV Spirax Sarco 25P - 25PAwen.cokNo ratings yet