You might also like
- An Acceptable Trade-Off Between New Call Blocking and Handoff Call Dropping Probabilities in Multimedia Cellular NetworksDocument7 pagesAn Acceptable Trade-Off Between New Call Blocking and Handoff Call Dropping Probabilities in Multimedia Cellular NetworksSunil GautamNo ratings yet
- Managing and Pricing Service Level Agreements For DifferentiatedDocument9 pagesManaging and Pricing Service Level Agreements For DifferentiatedKarina TQNo ratings yet
- Nomadic Service Assignment: Index Terms - Mobile Communication Systems, Online Computation, Distributed Net-WorksDocument35 pagesNomadic Service Assignment: Index Terms - Mobile Communication Systems, Online Computation, Distributed Net-WorksArthee PandiNo ratings yet
- Scalable Server BaseDocument14 pagesScalable Server Basekrishna_naNo ratings yet
- Come The Revolution - Network Dimensioning, Service Costing and Pricing in A Packet Switched EnvironmentDocument22 pagesCome The Revolution - Network Dimensioning, Service Costing and Pricing in A Packet Switched EnvironmentDilip GulatiNo ratings yet
- Advanced Testing Techniques For ATM Service Level AgreementsDocument16 pagesAdvanced Testing Techniques For ATM Service Level Agreementsdavid19860080No ratings yet
- WTC2002cadenus LastSubmission Acc PDFDocument7 pagesWTC2002cadenus LastSubmission Acc PDFMehdiAlborziNo ratings yet
- Resouce Management With HosesDocument14 pagesResouce Management With HosesPrem SantoshNo ratings yet
- Computer Sciences Department: A La Carte: An Economic Framework For Multi-ISPDocument13 pagesComputer Sciences Department: A La Carte: An Economic Framework For Multi-ISPDenisaaa93No ratings yet
- Proactive Resource Provisioning For Voice Over IPDocument7 pagesProactive Resource Provisioning For Voice Over IPeugene123No ratings yet
- Raja BetaDocument11 pagesRaja BetaPriyank KumarNo ratings yet
- Providing Data Transfer With Qos As Agreement-Based ServiceDocument10 pagesProviding Data Transfer With Qos As Agreement-Based ServiceFlorin PopNo ratings yet
- Service Disciplines for Guaranteed Performance Packet NetworksDocument23 pagesService Disciplines for Guaranteed Performance Packet NetworksHà Ngọc HảiNo ratings yet
- Evolutionary Model To Guarantee Quality of Service For Tactical Worldwide Interoperability For Microwave Access NetworksDocument12 pagesEvolutionary Model To Guarantee Quality of Service For Tactical Worldwide Interoperability For Microwave Access NetworksIAES IJAINo ratings yet
- Utility-Based Qos Brokering in Service Oriented ArchitecturesDocument9 pagesUtility-Based Qos Brokering in Service Oriented ArchitecturesknadhamNo ratings yet
- Bandwidth Consumption Control and Service Differentiation For Video StreamingDocument6 pagesBandwidth Consumption Control and Service Differentiation For Video StreamingobaidhmNo ratings yet
- Cost Minimization Algorithm for Data Center ManagementDocument8 pagesCost Minimization Algorithm for Data Center ManagementKumara SNo ratings yet
- Consultation Paper For Broadband Internet ServicesDocument17 pagesConsultation Paper For Broadband Internet Serviceskrul786No ratings yet
- IEEE/ACM TRANSACTIONS ON NETWORKING PAPER ON ALLOCATED BEST-EFFORT PACKET DELIVERYDocument12 pagesIEEE/ACM TRANSACTIONS ON NETWORKING PAPER ON ALLOCATED BEST-EFFORT PACKET DELIVERYKhalid SaidiNo ratings yet
- Quality of Service Management in IP Network: O.Chahbouni, A. Namir, A.BelangourDocument5 pagesQuality of Service Management in IP Network: O.Chahbouni, A. Namir, A.BelangourIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Gopal An 04 ProbabilisticDocument8 pagesGopal An 04 ProbabilisticeugeneNo ratings yet
- The Role of Price in The Connection Establishment ProcessDocument18 pagesThe Role of Price in The Connection Establishment Processdelafinca55No ratings yet
- VP Distribution Algorithm Maximizes Network RevenueDocument15 pagesVP Distribution Algorithm Maximizes Network RevenueKumar SumeetNo ratings yet
- Real Time CommunicationDocument30 pagesReal Time CommunicationMarguerite FlowerNo ratings yet
- Journal of Computer Applications - WWW - Jcaksrce.org - Volume 4 Issue 2Document5 pagesJournal of Computer Applications - WWW - Jcaksrce.org - Volume 4 Issue 2Journal of Computer ApplicationsNo ratings yet
- BW BenchmarkDocument22 pagesBW BenchmarkCentaur ArcherNo ratings yet
- Delay Jitter Control For Real-Time Communication in A Packet Switching NetworkDocument9 pagesDelay Jitter Control For Real-Time Communication in A Packet Switching NetworkAshish ChoudharyNo ratings yet
- A Rate BasedDocument11 pagesA Rate BasedAshish BhardwajNo ratings yet
- Performance Issues in ATM NetworkDocument19 pagesPerformance Issues in ATM NetworkHarsh SihotraNo ratings yet
- Carrier Service Level Agreement (Slas) TutorialDocument13 pagesCarrier Service Level Agreement (Slas) TutorialVulpe FlorianNo ratings yet
- Charging Schemes For Multiservice Networks: FrankDocument8 pagesCharging Schemes For Multiservice Networks: FrankjomasoolNo ratings yet
- Design of A Charging and Accounting Architecture For Qos-Differentiated VPN Services To Mobile UsersDocument10 pagesDesign of A Charging and Accounting Architecture For Qos-Differentiated VPN Services To Mobile UsersiwannofNo ratings yet
- Maximizing Cloud Profits with Quality GuaranteesDocument11 pagesMaximizing Cloud Profits with Quality GuaranteesJagannath JagguNo ratings yet
- Policy-Based Qos-Aware Packet Scheduling For Cdma 1X Ev-DoDocument8 pagesPolicy-Based Qos-Aware Packet Scheduling For Cdma 1X Ev-Do5014@@@@No ratings yet
- Quality of ServiceDocument28 pagesQuality of Serviceravitomar7No ratings yet
- Adaptive Multi-Tenancy Policy For Enhancing Service Level Agreement Through Resource Allocation in Cloud ComputingDocument11 pagesAdaptive Multi-Tenancy Policy For Enhancing Service Level Agreement Through Resource Allocation in Cloud ComputingAIRCC - IJCNCNo ratings yet
- The Chinese University of Hong Kong Computer Science and Engineering DepartmentDocument15 pagesThe Chinese University of Hong Kong Computer Science and Engineering DepartmentShahnaz KhanamNo ratings yet
- Customer Satisfaction Key to Cloud Server Profit MaximizationDocument43 pagesCustomer Satisfaction Key to Cloud Server Profit MaximizationKumara SNo ratings yet
- Profit Maximization4Document8 pagesProfit Maximization4KumarecitNo ratings yet
- Error Performance in TelecommunicationDocument15 pagesError Performance in TelecommunicationRanjit KumarNo ratings yet
- Some Principles For Quality of Service ManagementDocument19 pagesSome Principles For Quality of Service ManagementFábio Henrique SessoNo ratings yet
- IEEE Project Topics and Abstracts 2015-2016Document5 pagesIEEE Project Topics and Abstracts 2015-2016aswinNo ratings yet
- QOS Gurantee SchemeDocument6 pagesQOS Gurantee SchemeVibha TiwariNo ratings yet
- QOS Management Network: Proceedings of ICCT2003Document4 pagesQOS Management Network: Proceedings of ICCT2003mmallamehNo ratings yet
- Qoe-Based Cross-Layer Optimization of Wireless Video With Unperceivable Temporal Video Quality FluctuationDocument6 pagesQoe-Based Cross-Layer Optimization of Wireless Video With Unperceivable Temporal Video Quality FluctuationreuenthaNo ratings yet
- AttachmentDocument39 pagesAttachmentنهلة الأعرجNo ratings yet
- Thesis IptvDocument4 pagesThesis IptvGina Brown100% (2)
- A Bidding Based Resource Allocation Scheme in Wimax: Mahasweta Sarkar and Padmasini ChandramouliDocument11 pagesA Bidding Based Resource Allocation Scheme in Wimax: Mahasweta Sarkar and Padmasini Chandramoulivol2no6No ratings yet
- SLA Establishment With Guaranteed QoS in The Interdomain Network: A Stock ModelDocument19 pagesSLA Establishment With Guaranteed QoS in The Interdomain Network: A Stock ModelAIRCC - IJCNCNo ratings yet
- Quality-of-Service in Packet Networks Basic Mechanisms and DirectionsDocument16 pagesQuality-of-Service in Packet Networks Basic Mechanisms and DirectionsoicfbdNo ratings yet
- Connection Admission Control (Cac) For Qos Differentiation in PMP Ieee 802.16 NetworksDocument6 pagesConnection Admission Control (Cac) For Qos Differentiation in PMP Ieee 802.16 NetworksYuvaraj KrishnanNo ratings yet
- Policy Control & Charging SystemDocument26 pagesPolicy Control & Charging SystemAtanu MondalNo ratings yet
- Efficient Utilization of Channels Using Dynamic Guard Channel Allocation With Channel Borrowing Strategy in HandoffsDocument10 pagesEfficient Utilization of Channels Using Dynamic Guard Channel Allocation With Channel Borrowing Strategy in HandoffsCS & ITNo ratings yet
- CC CCCC CCCC CCCCDocument6 pagesCC CCCC CCCC CCCCViic ZanettiNo ratings yet
- Joevans Cdc-Dsl-Qos v0.6Document9 pagesJoevans Cdc-Dsl-Qos v0.6Tuong Duy TuanNo ratings yet
- Adaptable Software For Communications in Video ConferencingDocument6 pagesAdaptable Software For Communications in Video ConferencingChristie SajithaNo ratings yet
- Pembagian Trafik Jaringan KomputerDocument16 pagesPembagian Trafik Jaringan KomputerIsro' HidayatullohNo ratings yet
- Quality of Service MechanismsDocument3 pagesQuality of Service MechanismsscribdslaskNo ratings yet
- IP traffic and QoS control: the need for a flow-aware architectureDocument11 pagesIP traffic and QoS control: the need for a flow-aware architectureGerardo Antonio Martinez TiradoNo ratings yet
- Lesson 01 - Sarali VarisaiDocument1 pageLesson 01 - Sarali VarisaiDhanya Subramanian100% (5)
- 1005 1925Document6 pages1005 1925Sudharssun SubramanianNo ratings yet
- Exploring GNU RadioDocument10 pagesExploring GNU RadioSudharssun Subramanian0% (1)
- Cryptanalysis by Swiss EcoleDocument281 pagesCryptanalysis by Swiss EcoleSudharssun SubramanianNo ratings yet
- Instruction Sheet For NPATDocument1 pageInstruction Sheet For NPATVarian CrastoNo ratings yet
- Sigma7 Rotary Servomotor Product ManualDocument215 pagesSigma7 Rotary Servomotor Product ManualTrí ChốtNo ratings yet
- CW HCVR5108H V2 Manual PDFDocument276 pagesCW HCVR5108H V2 Manual PDFRoblespaulNo ratings yet
- ICT Grade 7Document20 pagesICT Grade 7Mendis SteaveNo ratings yet
- Computer Project SummaryDocument19 pagesComputer Project SummarySahil DhimanNo ratings yet
- Cracking the Coding Interview in JAVA - FoundationDocument12 pagesCracking the Coding Interview in JAVA - FoundationSaurav UpadhyayNo ratings yet
- ELECTRIC POWER DISTRIBUTION SYSTEM-SyllabusDocument2 pagesELECTRIC POWER DISTRIBUTION SYSTEM-SyllabusTanvi IsraniNo ratings yet
- (PPT) Temperature Monitoring During Catheter, Electrosurgery & Tissue Ablation L201Document2 pages(PPT) Temperature Monitoring During Catheter, Electrosurgery & Tissue Ablation L201Rugged MonitoringNo ratings yet
- Update BIOSDocument3 pagesUpdate BIOSpitherstaranNo ratings yet
- 4 Way SwitchDocument3 pages4 Way SwitchAndy ArenasNo ratings yet
- Activity Guide - Functions Make - Unit 4 Lesson 11Document3 pagesActivity Guide - Functions Make - Unit 4 Lesson 11Devin PhillipsNo ratings yet
- Ametek Power Instruments Sc-JemstarDocument193 pagesAmetek Power Instruments Sc-JemstarKenneth YanulaqueNo ratings yet
- Rock Paper ScissorsDocument8 pagesRock Paper ScissorsHdkkbdhNo ratings yet
- Precision-T7500 - Service Manual - En-Us PDFDocument108 pagesPrecision-T7500 - Service Manual - En-Us PDFshalabhmehtaNo ratings yet
- Distributed Systems Concepts ExplainedDocument49 pagesDistributed Systems Concepts ExplainedDhrumil DancerNo ratings yet
- RISc 2007 RAMBUS Paper QuestionsDocument4 pagesRISc 2007 RAMBUS Paper Questionsraghu dNo ratings yet
- List of End Semester Seminar TopicsDocument1 pageList of End Semester Seminar TopicsAyush AgrwalNo ratings yet
- Oracle Business Intelligence Applications: Installation Guide 11g Release 1 (11.1.1.9)Document150 pagesOracle Business Intelligence Applications: Installation Guide 11g Release 1 (11.1.1.9)prince2venkatNo ratings yet
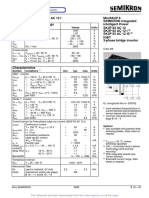
- SKIIP83AC12Document5 pagesSKIIP83AC12HUGO SOARESNo ratings yet
- Arcserve UDP Technical Whitepaper en J89Document24 pagesArcserve UDP Technical Whitepaper en J89abc defNo ratings yet
- Tony Resume 2013Document6 pagesTony Resume 2013Tony EsperNo ratings yet
- Algorithms and Data Structures Reader1Document85 pagesAlgorithms and Data Structures Reader1Aleksander JastrzębskiNo ratings yet
- S+ I/O: HAI805 & HAO805 HART I/O: Symphony PlusDocument4 pagesS+ I/O: HAI805 & HAO805 HART I/O: Symphony PlusMD. AL MUZAHIDNo ratings yet
- Brkiot 2555Document92 pagesBrkiot 2555Alberto ArellanoNo ratings yet
- Training Activity MatrixDocument6 pagesTraining Activity MatrixDemy Magaru CalateNo ratings yet
- MQ - zOS V7Document40 pagesMQ - zOS V7Rakesh KumarNo ratings yet
- MDR SeriesDocument2 pagesMDR SeriesRobertoNo ratings yet
- Software Requirements Specification: Version 1.0 ApprovedDocument13 pagesSoftware Requirements Specification: Version 1.0 ApprovedSaket Singh100% (1)
- AFC DISCS DCU37 Universal Voice Grade Dual Channel Unit (RDT) - 363-252-707i4Document32 pagesAFC DISCS DCU37 Universal Voice Grade Dual Channel Unit (RDT) - 363-252-707i4John WNo ratings yet
- Docker Cheat SheetDocument1 pageDocker Cheat SheetEjambNo ratings yet