You might also like
- Optimization Techniques for Multi-Variable ProblemsDocument30 pagesOptimization Techniques for Multi-Variable ProblemsMuhammad Bilal JunaidNo ratings yet
- Classical Optimization TechniqueDocument19 pagesClassical Optimization TechniqueAdityaShetgaonkarNo ratings yet
- Optimization Methods2Document10 pagesOptimization Methods2s200849298No ratings yet
- Classical Optimization Techniques: HapterDocument18 pagesClassical Optimization Techniques: Hapterchirag_693No ratings yet
- Nonlinear OptimizationDocument6 pagesNonlinear OptimizationKibria PrangonNo ratings yet
- ConferenceDocument17 pagesConferenceAb JubrilNo ratings yet
- MATH 232. Calculus of Functions of One Variable II. 4 Credits. University of North Carolina at Chapel Hill. Practice W - Answers and Explanations.Document5 pagesMATH 232. Calculus of Functions of One Variable II. 4 Credits. University of North Carolina at Chapel Hill. Practice W - Answers and Explanations.Jiwoo ParkNo ratings yet
- M2L2 LNDocument8 pagesM2L2 LNnagesha_basappa865No ratings yet
- Module - 2 Lecture Notes - 4 Optimization of Functions of Multiple Variables Subject To Equality ConstraintsDocument6 pagesModule - 2 Lecture Notes - 4 Optimization of Functions of Multiple Variables Subject To Equality Constraintsprasaad08No ratings yet
- Maxima and Minima.2Document31 pagesMaxima and Minima.2xyz abcNo ratings yet
- Non Linear Programming ProblemsDocument66 pagesNon Linear Programming Problemsbits_who_am_iNo ratings yet
- Tutorial 1 Fundamentals: Review of Derivatives, Gradients and HessiansDocument25 pagesTutorial 1 Fundamentals: Review of Derivatives, Gradients and Hessiansrashed44No ratings yet
- M2L2 LNDocument8 pagesM2L2 LNswapna44No ratings yet
- Maximizing Profit with Lagrange MultipliersDocument49 pagesMaximizing Profit with Lagrange MultipliersDurlav BanerjeeNo ratings yet
- Lect 2 ClassicalDocument29 pagesLect 2 ClassicalJay BhavsarNo ratings yet
- Sing Levar OptDocument29 pagesSing Levar OptDiego Isla-LópezNo ratings yet
- One Variable OptimizationDocument15 pagesOne Variable OptimizationCristóbal LaraNo ratings yet
- Osculating Parabola and Numerical ExperimentsDocument16 pagesOsculating Parabola and Numerical ExperimentsKolynNo ratings yet
- LAS in Basic Calculus Week 1 8 v2 1Document68 pagesLAS in Basic Calculus Week 1 8 v2 1Marione LontokNo ratings yet
- 6 OneD Unconstrained OptDocument29 pages6 OneD Unconstrained OptLolie SaidNo ratings yet
- Gradient-Based Optimization TechniquesDocument21 pagesGradient-Based Optimization TechniquesNeha Randhar DagaNo ratings yet
- Chapter 4. Extrema and Double Integrals: Section 4.1: Extrema, Second Derivative TestDocument6 pagesChapter 4. Extrema and Double Integrals: Section 4.1: Extrema, Second Derivative TestStelios KondosNo ratings yet
- MESOSCOPIC PHYSICSDocument8 pagesMESOSCOPIC PHYSICSPrashant SharmaNo ratings yet
- Lect 4 Unconstraint OptimizationDocument16 pagesLect 4 Unconstraint OptimizationJay BhavsarNo ratings yet
- Mathematical RelationsDocument22 pagesMathematical RelationsmarsNo ratings yet
- Unconstrained and Constrained OptimizationDocument31 pagesUnconstrained and Constrained OptimizationPhilip PCNo ratings yet
- Week 4 Lagrange SuffDocument12 pagesWeek 4 Lagrange SuffBushra AsifNo ratings yet
- Numerical AnalysisDocument12 pagesNumerical AnalysiskartikeyNo ratings yet
- Optimization Using Calculus: Stationary Points: Functions of Single and Two VariablesDocument28 pagesOptimization Using Calculus: Stationary Points: Functions of Single and Two Variablestejas mNo ratings yet
- Karush Kuhn Tucker SlidesDocument45 pagesKarush Kuhn Tucker Slidesmatchman6No ratings yet
- Nonlinear Least Squares Data Fitting: Appendix DDocument16 pagesNonlinear Least Squares Data Fitting: Appendix DTâm NguyễnNo ratings yet
- NLP NctuDocument19 pagesNLP NctularasmoyoNo ratings yet
- Lecture Notes-11: III. Introduction To Gaussian Random Variable (Normal Distribution)Document3 pagesLecture Notes-11: III. Introduction To Gaussian Random Variable (Normal Distribution)Arun Kumar DhupamNo ratings yet
- Extrems ValueDocument7 pagesExtrems ValueogrdomatNo ratings yet
- Matrix Calculus: 1 The DerivativeDocument13 pagesMatrix Calculus: 1 The Derivativef270784100% (1)
- Part2 Basic MathDocument22 pagesPart2 Basic Mathzepozepo06No ratings yet
- Evaluate Functions Using SubstitutionDocument41 pagesEvaluate Functions Using SubstitutionNikoru KatakanaNo ratings yet
- Nonlinear Programming Ii: Unconstrained Optimization TechniquesDocument44 pagesNonlinear Programming Ii: Unconstrained Optimization TechniquesMohamed AlmortadaNo ratings yet
- Chap3 UnconstrainedDocument45 pagesChap3 Unconstrainedaarulmurugu5005No ratings yet
- The Methods of Solution For Constrained Nonlinear ProgrammingDocument6 pagesThe Methods of Solution For Constrained Nonlinear ProgramminginventyNo ratings yet
- Chapter 5Document5 pagesChapter 5Dhynelle MuycoNo ratings yet
- Basic Calculus Lesson 6Document9 pagesBasic Calculus Lesson 6IraNo ratings yet
- Multi-variate Calculus ApplicationsDocument10 pagesMulti-variate Calculus ApplicationsRamón Quezada AbinaderNo ratings yet
- Connexions Module: m11240Document4 pagesConnexions Module: m11240rajeshagri100% (2)
- Calculus LectureDocument43 pagesCalculus LectureJovelynBrozasBihisNo ratings yet
- Introduction to Some Convergence theoremsDocument7 pagesIntroduction to Some Convergence theoremsAshoka VanjareNo ratings yet
- Asymptotic Theory For Maximum Likelihood Estimates in Reduced-Rank Multivariate Generalized Linear ModelsDocument19 pagesAsymptotic Theory For Maximum Likelihood Estimates in Reduced-Rank Multivariate Generalized Linear ModelsLiliana ForzaniNo ratings yet
- 7.1 Introduction of Optimal Economic Dispatch of GenerationDocument36 pages7.1 Introduction of Optimal Economic Dispatch of GenerationSwathi PrasadNo ratings yet
- Density Matrix of Harm OscDocument9 pagesDensity Matrix of Harm OscBismarck Costa Lima100% (1)
- A Note On The Optimal Convergence Rate of DescentDocument11 pagesA Note On The Optimal Convergence Rate of Descentd. r. o. a.No ratings yet
- OQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationDocument23 pagesOQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationdanNo ratings yet
- Section 1 Discussion - ECON 100ADocument3 pagesSection 1 Discussion - ECON 100Aanconrad1No ratings yet
- Basic CalculusDocument15 pagesBasic CalculusHanna GalatiNo ratings yet
- Math Methods Reference Materials 2014Document27 pagesMath Methods Reference Materials 2014Danny GoldstoneNo ratings yet
- Nonlinear ProgrammingDocument35 pagesNonlinear ProgrammingPreethi GopalanNo ratings yet
- Pacific Journal of Mathematics Gradient Method ConvergenceDocument4 pagesPacific Journal of Mathematics Gradient Method ConvergenceMantra Mantra MantraNo ratings yet
- Homework 5Document7 pagesHomework 5Ale GomezNo ratings yet
- Lagrange MultipliersDocument3 pagesLagrange MultiplierskiwiedonNo ratings yet
- Limits and Continuity (Calculus) Engineering Entrance Exams Question BankFrom EverandLimits and Continuity (Calculus) Engineering Entrance Exams Question BankNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- JNTUA Mechanical Engineering (R09) Syllabus BookDocument147 pagesJNTUA Mechanical Engineering (R09) Syllabus Bookslv_prasaad0% (1)
- 9A03504 Design of Machine ElementsDocument2 pages9A03504 Design of Machine Elementsslv_prasaadNo ratings yet
- Design of Machine Elements Exam QuestionsDocument8 pagesDesign of Machine Elements Exam Questionsslv_prasaadNo ratings yet
- R7310305-Design of Machine Members-I2Document4 pagesR7310305-Design of Machine Members-I2slv_prasaad100% (1)
- Worm GearsDocument4 pagesWorm Gearsnitesh_n2840No ratings yet
- Design of Machine Elements Exam QuestionsDocument8 pagesDesign of Machine Elements Exam Questionsslv_prasaadNo ratings yet
- Curved BeamsDocument8 pagesCurved BeamsAnonymous EKqkRJsJNNo ratings yet
- Design of Machine Elements Exam QuestionsDocument8 pagesDesign of Machine Elements Exam Questionsslv_prasaadNo ratings yet
- r7320102 Environmental EngineeringDocument4 pagesr7320102 Environmental Engineeringslv_prasaadNo ratings yet
- 9A03504 Design of Machine Elements IDocument4 pages9A03504 Design of Machine Elements Islv_prasaadNo ratings yet
- R7310305-Design of Machine Members-IDocument1 pageR7310305-Design of Machine Members-Islv_prasaadNo ratings yet
- RCC Slab Estimation and Bending ScheduleDocument4 pagesRCC Slab Estimation and Bending Scheduleslv_prasaadNo ratings yet
- Me1302 LP ADocument3 pagesMe1302 LP ACKDinakarrajNo ratings yet
- 9A03504 Design of Machine Elements I 1Document2 pages9A03504 Design of Machine Elements I 1slv_prasaadNo ratings yet
- ME2303Document7 pagesME2303slv_prasaadNo ratings yet
- The Z Engine - A New Type of Low Emission Diesel EngineDocument9 pagesThe Z Engine - A New Type of Low Emission Diesel Engineslv_prasaadNo ratings yet
- Performance and emission characteristics of Karanja biodiesel and its blends in a variable compression ignition engineDocument52 pagesPerformance and emission characteristics of Karanja biodiesel and its blends in a variable compression ignition engineslv_prasaadNo ratings yet
- r7320101 Geotechnical Engineering IDocument1 pager7320101 Geotechnical Engineering Iprasaad08No ratings yet
- Engineering Optimization Ch 1 IntroductionDocument21 pagesEngineering Optimization Ch 1 Introductionslv_prasaadNo ratings yet
- Lecture 26aDocument12 pagesLecture 26aslv_prasaadNo ratings yet
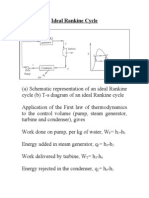
- Ideal Rankine CycleDocument27 pagesIdeal Rankine Cycleslv_prasaadNo ratings yet
- CFD Optimization With Altair Hyperworks: in This Issue July 2006Document6 pagesCFD Optimization With Altair Hyperworks: in This Issue July 2006slv_prasaadNo ratings yet
- CH 9 1 2Document46 pagesCH 9 1 2slv_prasaadNo ratings yet
- .. TenthClass BitBanks MathsEM 7geomentryDocument4 pages.. TenthClass BitBanks MathsEM 7geomentryslv_prasaadNo ratings yet
- Ajas53189 196Document8 pagesAjas53189 196slv_prasaadNo ratings yet
- Extraction and Visualization of Swirl and Tumble Motion From Engine Simulation DataDocument15 pagesExtraction and Visualization of Swirl and Tumble Motion From Engine Simulation Dataslv_prasaadNo ratings yet
- CH 4 1Document48 pagesCH 4 1slv_prasaadNo ratings yet
- 1zzfe Technical DataDocument13 pages1zzfe Technical Datacris5001100% (1)
- CFD Optimization With Altair Hyperworks: in This Issue July 2006Document6 pagesCFD Optimization With Altair Hyperworks: in This Issue July 2006slv_prasaadNo ratings yet
- Extraction and Visualization of Swirl and Tumble Motion From Engine Simulation DataDocument15 pagesExtraction and Visualization of Swirl and Tumble Motion From Engine Simulation Dataslv_prasaadNo ratings yet
- Text Book Development 1Document24 pagesText Book Development 1Iqra MunirNo ratings yet
- Right to Personal Liberty and Judicial Process in IndiaDocument636 pagesRight to Personal Liberty and Judicial Process in IndiaDrDiana PremNo ratings yet
- Concept Deck de BosBoerderij - Dec2023Document32 pagesConcept Deck de BosBoerderij - Dec2023Bruna San RomanNo ratings yet
- Red Lion MP Sensor Product Manual PDFDocument2 pagesRed Lion MP Sensor Product Manual PDFJigneshNo ratings yet
- Brief History of Gifted and Talented EducationDocument4 pagesBrief History of Gifted and Talented Educationapi-336040000No ratings yet
- ADEC Al Maali International Private School 2015 2016Document18 pagesADEC Al Maali International Private School 2015 2016Edarabia.com100% (1)
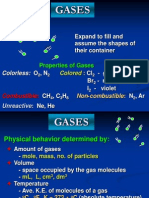
- Properties and Behavior of GasesDocument34 pagesProperties and Behavior of GasesPaul Jeremiah Serrano NarvaezNo ratings yet
- Lab No.7: Measurement of Coupling Coefficient, Directivity and Insertion Loss of A Directional CouplerDocument3 pagesLab No.7: Measurement of Coupling Coefficient, Directivity and Insertion Loss of A Directional CouplerM. Ahmad RazaNo ratings yet
- Baroque MusicDocument15 pagesBaroque Musicthot777100% (2)
- 8th Edition of The AJCC - TNM Staging System of Thyroid Cancer - What To Expect (ITCO#2)Document5 pages8th Edition of The AJCC - TNM Staging System of Thyroid Cancer - What To Expect (ITCO#2)Valentina IndahNo ratings yet
- NRBC-Internship Report - ShafayetDocument54 pagesNRBC-Internship Report - ShafayetShafayet JamilNo ratings yet
- Hunch or Reason?: Reading File 11Document2 pagesHunch or Reason?: Reading File 11georgiana dinuNo ratings yet
- 1st Activity in ACCA104Document11 pages1st Activity in ACCA104John Rey BonitNo ratings yet
- Filipino Catholic Wedding Ceremony LiturgyDocument8 pagesFilipino Catholic Wedding Ceremony LiturgyHoney Joy ChuaNo ratings yet
- Principles of The Doctrine of ChristDocument17 pagesPrinciples of The Doctrine of ChristNovus Blackstar100% (2)
- 1 (Speaking of A Letter) I Made This One Longer, Only Because I Had Not Enough Time To Make It ShorterDocument10 pages1 (Speaking of A Letter) I Made This One Longer, Only Because I Had Not Enough Time To Make It ShorterJhancarlos Carrasco MNo ratings yet
- Top Ten Nutrients That Support Fat Loss - Poliquin ArticleDocument4 pagesTop Ten Nutrients That Support Fat Loss - Poliquin Articledjoiner45No ratings yet
- 2 Science Animals Practise TestDocument2 pages2 Science Animals Practise TestThrisha WickramasingheNo ratings yet
- Space Oddity Chords (Ver 2) by David Bowie Tabs at Ultimate Guitar ArchiveDocument3 pagesSpace Oddity Chords (Ver 2) by David Bowie Tabs at Ultimate Guitar ArchiveEMMANUEL ARNOULDNo ratings yet
- 4.6.6 Lab View Wired and Wireless Nic InformationDocument4 pages4.6.6 Lab View Wired and Wireless Nic InformationThắng NguyễnNo ratings yet
- Life and Works or Rizal - EssayDocument2 pagesLife and Works or Rizal - EssayQuince CunananNo ratings yet
- 1 Session1 DRR ConceptsDocument43 pages1 Session1 DRR ConceptsHoneylet Ü FerolNo ratings yet
- AI vs ML: A Brief ExplanationDocument3 pagesAI vs ML: A Brief Explanationkhaoula BelghitiNo ratings yet
- Eight Directions Feng ShuiDocument6 pagesEight Directions Feng Shuifree_scribdNo ratings yet
- AirLocker PresentationDocument11 pagesAirLocker PresentationjzuckertNo ratings yet
- ADJECTIVES ENDING IN Ing and EdDocument1 pageADJECTIVES ENDING IN Ing and EdRafael FloresNo ratings yet
- Vaiana Et Al (2021)Document11 pagesVaiana Et Al (2021)Raffaele CapuanoNo ratings yet
- The Message Development Tool - A Case For Effective Operationalization of Messaging in Social Marketing PracticeDocument17 pagesThe Message Development Tool - A Case For Effective Operationalization of Messaging in Social Marketing PracticesanjayamalakasenevirathneNo ratings yet
- Effortless by Greg McKeownDocument6 pagesEffortless by Greg McKeownNaison StanleyNo ratings yet
- MAMALUMPONG JORDAN A. BSN-3 Literature ReviewDocument3 pagesMAMALUMPONG JORDAN A. BSN-3 Literature ReviewJordan Abosama MamalumpongNo ratings yet