You might also like
- Chapter - 5 Photovoltaic Powered Induction Motor DriveDocument29 pagesChapter - 5 Photovoltaic Powered Induction Motor Driveshanmugam.sNo ratings yet
- Tese Grid Connected PV 2001Document124 pagesTese Grid Connected PV 2001chauhan303No ratings yet
- InverterDocument23 pagesInverterBittu Kumar SinhaNo ratings yet
- Design of A 50 KW Solar PV Rooftop SystemDocument9 pagesDesign of A 50 KW Solar PV Rooftop SystemvmramakrishnanNo ratings yet
- Developing an MPPT System for Small Solar ChargingDocument115 pagesDeveloping an MPPT System for Small Solar ChargingJeferson AraujoNo ratings yet
- Incremental Conductance MPPT Method For PV Systems-LibreDocument3 pagesIncremental Conductance MPPT Method For PV Systems-LibreRushikeshKatkarNo ratings yet
- Sample Final Exam QuestionsDocument3 pagesSample Final Exam QuestionsNamiraNo ratings yet
- CD4047 InverterDocument30 pagesCD4047 InverterSANDEEP KUMAR RAHEJA100% (1)
- Economic Dispatch Using Dynamic ProgrammingDocument22 pagesEconomic Dispatch Using Dynamic ProgrammingSyed Ali RazaNo ratings yet
- A Simplified Forward and Backward Sweep ApproachDocument5 pagesA Simplified Forward and Backward Sweep ApproachImranAhmadQuadriNo ratings yet
- EEE 805 Assignment Questions For Chapter 20Document11 pagesEEE 805 Assignment Questions For Chapter 20ayeniNo ratings yet
- University of Engineering & Technology Mardan: E&M Lab Project ReportDocument4 pagesUniversity of Engineering & Technology Mardan: E&M Lab Project Reportwaleed Haroon100% (1)
- Design and Implementation of Smart Solar LEDDocument4 pagesDesign and Implementation of Smart Solar LEDArif Arkarnis100% (3)
- Grid Connected Rooftop Solar PV System A Pre Feasibility Estimation Using Pvsol Premium and System Advisor ModelsamDocument6 pagesGrid Connected Rooftop Solar PV System A Pre Feasibility Estimation Using Pvsol Premium and System Advisor ModelsamRazvan SasuNo ratings yet
- Maximum Power Point Tracking For PV ArrayDocument68 pagesMaximum Power Point Tracking For PV ArraySamar El-lethyNo ratings yet
- IOT Based Structural Health MonitoringDocument3 pagesIOT Based Structural Health MonitoringEditor IJTSRDNo ratings yet
- Solar Combiner Box TrainingDocument33 pagesSolar Combiner Box TrainingRavi Teja100% (1)
- Load Flow Analysis of Radial Distribution NetworkDocument47 pagesLoad Flow Analysis of Radial Distribution NetworkGopinath RamalingamNo ratings yet
- Project Solar Street LightDocument71 pagesProject Solar Street LightSiddharth Joon75% (4)
- Economic Operation of Power SystemsDocument21 pagesEconomic Operation of Power SystemsHarish Kumar GNo ratings yet
- Solar Mobile Charging Station Final ProjectDocument23 pagesSolar Mobile Charging Station Final Projectyash JadhaoNo ratings yet
- Micro CHP PDFDocument4 pagesMicro CHP PDFtrungnguyenphuocNo ratings yet
- Design and Implementation of 5kVA PhotovDocument92 pagesDesign and Implementation of 5kVA PhotovMarc DonaldNo ratings yet
- Solar Powered Led Street Light-1Document25 pagesSolar Powered Led Street Light-1kiswah computersNo ratings yet
- MPPT Techniques ComparisonDocument20 pagesMPPT Techniques ComparisonAdarsh Shetty100% (1)
- Hybrid Power Generation by Solar - WindDocument27 pagesHybrid Power Generation by Solar - WindUday Wankar100% (1)
- Final Year Project ReportDocument40 pagesFinal Year Project ReportNAKUL KANARNo ratings yet
- Modelling, Simulation and Control of Utility Grid Integrated Solar Photovoltaic System Using MatlabDocument10 pagesModelling, Simulation and Control of Utility Grid Integrated Solar Photovoltaic System Using MatlabInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Sri Sivasubramaniyanadar College of Engineering, Kalavakkam - 603 110Document2 pagesSri Sivasubramaniyanadar College of Engineering, Kalavakkam - 603 110Rajalakshmi TVNo ratings yet
- Electric Power Distribution Systems - F.C. ChanDocument9 pagesElectric Power Distribution Systems - F.C. ChanPVV RAMA RAONo ratings yet
- Wireless Mobile Charger Using Inductive Coupling: October 2017Document17 pagesWireless Mobile Charger Using Inductive Coupling: October 2017Jerin TasnimNo ratings yet
- Chapter On1 and Two-1Document25 pagesChapter On1 and Two-1Roqeebat OdunayoNo ratings yet
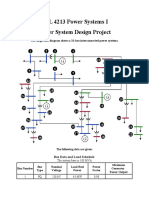
- Power System Design ProjectDocument6 pagesPower System Design Projectvpzfaris0% (1)
- BS 7671 - British StandardDocument4 pagesBS 7671 - British StandardYousif_AbdalhalimNo ratings yet
- Power Electronic Inverter - ReportDocument9 pagesPower Electronic Inverter - ReportPrateek AgarwalNo ratings yet
- Final Year Project 30 AprilDocument25 pagesFinal Year Project 30 AprilTobaNo ratings yet
- 250-kW Grid-Connected PV Array - MATLAB & SimulinkDocument2 pages250-kW Grid-Connected PV Array - MATLAB & SimulinkMuhammad Kamran MustafaNo ratings yet
- Major Project 2 (Faults in Transmission Line)Document31 pagesMajor Project 2 (Faults in Transmission Line)Khaja SameeduddinNo ratings yet
- Single Axis Solar Tracking System Using 555 ICDocument19 pagesSingle Axis Solar Tracking System Using 555 ICSuresh KumarNo ratings yet
- Solar Battery ChargerDocument32 pagesSolar Battery Chargerapi-298102482No ratings yet
- Ch5 Power System - Transmission Line ParametersDocument60 pagesCh5 Power System - Transmission Line Parametershafiz azman100% (3)
- SolarPV Hybrid InvertersDocument18 pagesSolarPV Hybrid Inverterskiran392No ratings yet
- MPPT Based Optimal Charge Controller in PV SystemDocument37 pagesMPPT Based Optimal Charge Controller in PV SystemMalik Sameeullah100% (2)
- Cape Coast Technical University Project Work Design of Solar Street Light System From University of Cape Coast West Gate To ElminaDocument29 pagesCape Coast Technical University Project Work Design of Solar Street Light System From University of Cape Coast West Gate To ElminaJames TorkonooNo ratings yet
- Underground Residential Distribution Layouts GuideDocument6 pagesUnderground Residential Distribution Layouts Guidekash30No ratings yet
- Solar Street Lights Control Using PIR SensorsDocument8 pagesSolar Street Lights Control Using PIR SensorsIJRASETPublicationsNo ratings yet
- Electrical Vehicle (EV) Charging Station SolutionsDocument7 pagesElectrical Vehicle (EV) Charging Station Solutionsc3controlsNo ratings yet
- Inspector Training SLO 2012 4ppDocument41 pagesInspector Training SLO 2012 4ppAgung BayuNo ratings yet
- Chapter 1-2 - 3 Phase System To Part 3Document40 pagesChapter 1-2 - 3 Phase System To Part 3Hanis SyafiqNo ratings yet
- MINI PROJECT (2) Phone Wireless ChargingDocument36 pagesMINI PROJECT (2) Phone Wireless ChargingSamuel Adamu100% (1)
- Report On Solar PV TechnologiesDocument16 pagesReport On Solar PV Technologiessagar paneliyaNo ratings yet
- Sample Street Light Report 2 PDFDocument58 pagesSample Street Light Report 2 PDFApoorva v Hejjaji100% (1)
- Design and Implementation of A G P Photovoltaic Maximum Power Point TrackerDocument55 pagesDesign and Implementation of A G P Photovoltaic Maximum Power Point TrackerBilal KanjNo ratings yet
- Innovative EEE Final Projects List 2013 SooxmaDocument15 pagesInnovative EEE Final Projects List 2013 SooxmaMark Nicko ZablanNo ratings yet
- Contactless Home Switch Project SynopsisDocument3 pagesContactless Home Switch Project Synopsisvenkateswaran.M venkateswaran.MNo ratings yet
- ChaptersDocument47 pagesChaptersAitha DeepakNo ratings yet
- Simulation of Solar Powered Water Pumping System Using Induction Motor PDFDocument4 pagesSimulation of Solar Powered Water Pumping System Using Induction Motor PDFInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- CH 5Document24 pagesCH 5Михаил МироновNo ratings yet
- CH 5 PDFDocument24 pagesCH 5 PDFМихаил МироновNo ratings yet
- Photovoltaics | 101: The hands-on beginner's guide for designing an on-grid or off-grid PV systemFrom EverandPhotovoltaics | 101: The hands-on beginner's guide for designing an on-grid or off-grid PV systemNo ratings yet
- Udayanandan, Notes On Tensors PDFDocument56 pagesUdayanandan, Notes On Tensors PDFhristos314No ratings yet
- 1170 Imagerunner Advance DX 4700 Series PC r0 200228Document180 pages1170 Imagerunner Advance DX 4700 Series PC r0 200228Marco Antonio Valverde MarinNo ratings yet
- 5SL43407RC Datasheet enDocument5 pages5SL43407RC Datasheet enDiana Martinez SifuentesNo ratings yet
- RPVP Puerto PrincesaDocument8 pagesRPVP Puerto PrincesaRanny LomibaoNo ratings yet
- Tek 10-03Document4 pagesTek 10-03Thai DamNo ratings yet
- Peanut Brittle LabDocument2 pagesPeanut Brittle LabMary Bacon HillebrandNo ratings yet
- Single and Multiphase CFD Simulations For Designing Cavitating VenturiDocument12 pagesSingle and Multiphase CFD Simulations For Designing Cavitating VenturiCarlos GamarraNo ratings yet
- TAIL Project NewsletterDocument9 pagesTAIL Project NewsletterAbdul R. MustaphaNo ratings yet
- CPU Vs vCPUDocument14 pagesCPU Vs vCPUainseanNo ratings yet
- Calculating The Pressure Tank Size: Where: Q Cut in & Cut OutDocument1 pageCalculating The Pressure Tank Size: Where: Q Cut in & Cut OutEdsel Camiguing LoquillanoNo ratings yet
- Calibration of A Pressure GaugeDocument6 pagesCalibration of A Pressure GaugeThapelo100% (2)
- Us01cphy02 Unit 1 2014 THPDocument18 pagesUs01cphy02 Unit 1 2014 THPapi-264723824No ratings yet
- Peristaltic Transport of A Viscous Fluid in An Asymmetric Channel With Permeable WallsDocument13 pagesPeristaltic Transport of A Viscous Fluid in An Asymmetric Channel With Permeable WallsRakeshconclaveNo ratings yet
- Schedule of Floor Finishes: Code Description Area (SQM) FF101 FF102Document5 pagesSchedule of Floor Finishes: Code Description Area (SQM) FF101 FF102Camille ArielNo ratings yet
- Chapter 4-EDocument42 pagesChapter 4-EMahrouz MadoNo ratings yet
- Tractor 2017 Catalogue WebDocument36 pagesTractor 2017 Catalogue WebAnonymous 1XBCMXNo ratings yet
- Psib 20150212Document10 pagesPsib 20150212Léandre Ettekri NdriNo ratings yet
- Construction Companies in IndiaDocument11 pagesConstruction Companies in Indiashobhit.goel33% (3)
- Wheel Loader L50E: 2 EngineDocument4 pagesWheel Loader L50E: 2 EngineInjeletro Diesel100% (1)
- Product Catalog: Ipe ProfilesDocument2 pagesProduct Catalog: Ipe ProfilesGokul royalveritasNo ratings yet
- Lightning Protection System Testing & Commissioning Method StatementDocument3 pagesLightning Protection System Testing & Commissioning Method Statementvin ssNo ratings yet
- TF Section - MICET 2016Document21 pagesTF Section - MICET 2016Eddie D SouzaNo ratings yet
- Wabco Air Suspension Compressor RepairDocument3 pagesWabco Air Suspension Compressor RepairgarcolNo ratings yet
- Stop Motion Pre Production - Negotiated BriefDocument10 pagesStop Motion Pre Production - Negotiated Briefp4nd3m0n1c100% (1)
- Android Tutorial - Broadcast ReceiversDocument15 pagesAndroid Tutorial - Broadcast ReceiversTrieu Ngo HuyNo ratings yet
- STP of Ethifen SyrupDocument5 pagesSTP of Ethifen SyrupBejoy KarimNo ratings yet
- Industrial Insulation Applications: Green Engineering-1 Insulation Spreadsheets - ContentDocument55 pagesIndustrial Insulation Applications: Green Engineering-1 Insulation Spreadsheets - ContentRashel HasanNo ratings yet
- The Magnaflux Advantage (Whole Catalog)Document51 pagesThe Magnaflux Advantage (Whole Catalog)Andy StkNo ratings yet
- How To Fix Samsung CorbyDocument2 pagesHow To Fix Samsung CorbyMohd Sariffudin DaudNo ratings yet
- Installation Tools and Equipment - ACCC Pasadena.Document12 pagesInstallation Tools and Equipment - ACCC Pasadena.EDGARDO DIAZGRANADOSNo ratings yet