You might also like
- Traffic Flow Theory EditedDocument10 pagesTraffic Flow Theory EditedreyjNo ratings yet
- Traffic Flow: Fundamental PrinciplesDocument3 pagesTraffic Flow: Fundamental PrincipleshahaNo ratings yet
- Traffic Signal DesignDocument36 pagesTraffic Signal DesignYasar AthifNo ratings yet
- Chapter 3Document70 pagesChapter 3danielNo ratings yet
- Chapter 3 Pavement DesignDocument22 pagesChapter 3 Pavement DesignAbdulmelik AdemNo ratings yet
- Observer MetodDocument7 pagesObserver MetodNelvin García100% (1)
- A Geographic Information System (GIS), or Geographical Information System, Is Any System That Captures, Stores, Analyzes, Manages, and Presents Data That Are Linked To LocationDocument12 pagesA Geographic Information System (GIS), or Geographical Information System, Is Any System That Captures, Stores, Analyzes, Manages, and Presents Data That Are Linked To LocationDonaldTonyNo ratings yet
- Traffic Stream CharacteristicsDocument38 pagesTraffic Stream CharacteristicsMarkedjani72No ratings yet
- NJDOT Bicycle Compatible Roadways and Bikeways - Chapter 2Document24 pagesNJDOT Bicycle Compatible Roadways and Bikeways - Chapter 2John BoyleNo ratings yet
- HGD QP SolutionDocument68 pagesHGD QP Solutionmomin sialNo ratings yet
- Lecture No 11: Transportation Engineering by C. Jotin Khisty and B. Kent Lall (Pages 585 - 598)Document20 pagesLecture No 11: Transportation Engineering by C. Jotin Khisty and B. Kent Lall (Pages 585 - 598)Arman AliNo ratings yet
- Introduction to mixing and dispersion in natural waterwaysDocument63 pagesIntroduction to mixing and dispersion in natural waterwaysLuay Kadhum AlwailiNo ratings yet
- Intelligent Urban Traffic Control System Assingment 2Document23 pagesIntelligent Urban Traffic Control System Assingment 2engrasha88No ratings yet
- CH 03 Characteristics of Road Users PDFDocument130 pagesCH 03 Characteristics of Road Users PDFChristian John SaludarNo ratings yet
- Traffic Flow TheoryDocument27 pagesTraffic Flow TheoryALEXANDRA BRIANE CABRERANo ratings yet
- Traffic Engineering Studies (Parking Studies) : Sheethal Jain SPDocument14 pagesTraffic Engineering Studies (Parking Studies) : Sheethal Jain SPHELLO WORLDNo ratings yet
- Traffic Engineering StudiesDocument97 pagesTraffic Engineering StudiesSirimilla MeharNo ratings yet
- CE 44 Highway and Railroad Engineering: Karl Judah C. de Guzman Bsce-3DDocument26 pagesCE 44 Highway and Railroad Engineering: Karl Judah C. de Guzman Bsce-3DKarl Judah De GuzmanNo ratings yet
- Cadet Engineer Program Traffic EngineeringDocument29 pagesCadet Engineer Program Traffic EngineeringAbaron NgNo ratings yet
- A Crash-Prediction Model For Multilane RoadsDocument14 pagesA Crash-Prediction Model For Multilane RoadsTanisadanNo ratings yet
- Chapter 6 - Traffic Engineering Studies and Traffic Flow CharacteristicsDocument14 pagesChapter 6 - Traffic Engineering Studies and Traffic Flow CharacteristicsVia Angelica ColinaNo ratings yet
- Traffic SimulationDocument32 pagesTraffic SimulationkarthikeanNo ratings yet
- Traffic Capacity Analysis & Signal TimingDocument4 pagesTraffic Capacity Analysis & Signal TimingLastri PasaribuNo ratings yet
- Volume StudiesDocument48 pagesVolume Studiesziad almnaseerNo ratings yet
- GRP 3 Characteristics of The Driver The Pedestrian The Vehicle and The RoadDocument78 pagesGRP 3 Characteristics of The Driver The Pedestrian The Vehicle and The RoadKevin SalzalNo ratings yet
- Traffic Volume CountsDocument19 pagesTraffic Volume CountsMuhammad Waqar Aslam ChNo ratings yet
- Basic Macroscopic Traffic Flow ModelDocument42 pagesBasic Macroscopic Traffic Flow ModelHemant TiwariNo ratings yet
- Traffic Full BookDocument69 pagesTraffic Full BookTommy JohnsonNo ratings yet
- Spot Speed StudyDocument7 pagesSpot Speed StudyJohnson KenNo ratings yet
- Adt Series Motion Control CardDocument97 pagesAdt Series Motion Control Cardfelipedelio100% (1)
- Queuing Analysis Lecture NotesDocument13 pagesQueuing Analysis Lecture NotesGhulam Hazrat RezaiNo ratings yet
- Transportation Systems: Northwestern University, USADocument4 pagesTransportation Systems: Northwestern University, USAJustinNo ratings yet
- Traffic Progression ModelsDocument19 pagesTraffic Progression ModelsZazliana Izatti100% (1)
- Self-Organizing Traffic Lights: A Realistic Simulation: 3.1 Introduction: Catch The Green Wave? Better Make Your Own!Document9 pagesSelf-Organizing Traffic Lights: A Realistic Simulation: 3.1 Introduction: Catch The Green Wave? Better Make Your Own!federson2760No ratings yet
- Assignment 1Document6 pagesAssignment 1Bipin GyawaliNo ratings yet
- 1.2 - Highway ClassificationDocument65 pages1.2 - Highway ClassificationAbdullahi Abdi HashiNo ratings yet
- National Automated Highway System Research Program (1994 1997) Intelligent Vehicle Initiative ProgramDocument30 pagesNational Automated Highway System Research Program (1994 1997) Intelligent Vehicle Initiative ProgramAnand Tatte100% (1)
- 00000-Uncontrolled Intersection PDFDocument16 pages00000-Uncontrolled Intersection PDFOso OsoNo ratings yet
- JNTU MTech Transportation Engineering Course StructureDocument20 pagesJNTU MTech Transportation Engineering Course StructureSurender Reddy100% (1)
- Traffic Signal Control UsingDocument15 pagesTraffic Signal Control UsingHarshal AroraNo ratings yet
- Overload Research 2022 by Engineer Aregahegn Abebe.Document19 pagesOverload Research 2022 by Engineer Aregahegn Abebe.aregahegnabebe3No ratings yet
- MBTA Orange and Red Line Cars RFPDocument13 pagesMBTA Orange and Red Line Cars RFPNate BoroyanNo ratings yet
- Lecture 2 - Road User and Vehicle CharacteristicsDocument31 pagesLecture 2 - Road User and Vehicle CharacteristicsMing QiNo ratings yet
- Lecture 11Document48 pagesLecture 11John Peter DulnuanNo ratings yet
- 1.4 Manual On Project HydrologyDocument28 pages1.4 Manual On Project HydrologyPRABHUTIRUPURNo ratings yet
- CMA For Signalized Intersections by Elena PrassasDocument28 pagesCMA For Signalized Intersections by Elena PrassasCarlos MensahNo ratings yet
- Advanced Transportation Engineering Web CourseDocument2 pagesAdvanced Transportation Engineering Web Courseirbasukirahardjoces0% (1)
- TCW 3105 Transportation Engineering and Planning I 2018-2019Document57 pagesTCW 3105 Transportation Engineering and Planning I 2018-2019dave tafadzwa kuyeriNo ratings yet
- Class No 4 CVL 316 W16Document19 pagesClass No 4 CVL 316 W16JayNo ratings yet
- Level of ServiceDocument3 pagesLevel of ServicesateeshNo ratings yet
- Bus Rapid Transit Service Design: Recommended PracticeDocument27 pagesBus Rapid Transit Service Design: Recommended PracticeLasisi Kayode HassanNo ratings yet
- Ch2-Probability Concepts PDFDocument59 pagesCh2-Probability Concepts PDFkhawla2789No ratings yet
- Microscopic ModelDocument23 pagesMicroscopic ModelRachel RachelNo ratings yet
- Unit 2 Transportation Planning ProcessDocument15 pagesUnit 2 Transportation Planning Processpercy100% (1)
- Transportation - II: by Engr. Muhammad Waseem Lecturer Department of Civil Engineering UET, JalozaiDocument38 pagesTransportation - II: by Engr. Muhammad Waseem Lecturer Department of Civil Engineering UET, JalozaiShahid AliNo ratings yet
- Transportation Engineering: Eng. Fuad Abdirizak ElmiDocument29 pagesTransportation Engineering: Eng. Fuad Abdirizak ElmiFuaad Abdirizak ElmiNo ratings yet
- Railroad Signal Specialist: Passbooks Study GuideFrom EverandRailroad Signal Specialist: Passbooks Study GuideNo ratings yet
- Traffic Flow and Analysis of RoadsDocument14 pagesTraffic Flow and Analysis of RoadsJayson J. Pagal100% (1)
- Fundamental Principles Of: Traffic FlowDocument10 pagesFundamental Principles Of: Traffic FlowJericho CastilloNo ratings yet
- Fundamentals of Traffic Flow TheoryDocument4 pagesFundamentals of Traffic Flow TheoryGerly Joy MaquilingNo ratings yet
- Colour Code Volvo RimsDocument51 pagesColour Code Volvo RimsJavier Laso LópezNo ratings yet
- Ar 2015 EngDocument204 pagesAr 2015 EngdextergkNo ratings yet
- Adamjee Insurance CompanyDocument31 pagesAdamjee Insurance Companyaqsa tariqNo ratings yet
- Grampians National Park campground mapDocument9 pagesGrampians National Park campground mapthetrutherNo ratings yet
- Car Park Designers' Handbook (Part 03 of 05)Document44 pagesCar Park Designers' Handbook (Part 03 of 05)Adam Michael GreenNo ratings yet
- Adobe Scan 13 Jan 2022Document1 pageAdobe Scan 13 Jan 2022Ionut LupuNo ratings yet
- Incoterms Made EasyDocument35 pagesIncoterms Made EasyjssainisNo ratings yet
- Opel Rocks e ManualDocument38 pagesOpel Rocks e ManualLui ReneNo ratings yet
- ML B 200 B200am8Document13 pagesML B 200 B200am8Sergio LópezNo ratings yet
- Toyota Motor Corporation: Presented by Vasilica PuicaDocument31 pagesToyota Motor Corporation: Presented by Vasilica PuicaViky PuicăNo ratings yet
- Light vehicle safety toolsDocument5 pagesLight vehicle safety toolsErnesto CabuyadaoNo ratings yet
- Uk Sic Code ListDocument7 pagesUk Sic Code ListvikasgodageNo ratings yet
- Uganda Road Project Implementation ManualDocument32 pagesUganda Road Project Implementation Manualpeter093100% (1)
- Swot Analysis OF Tata Motors: Organisational BehaviourDocument11 pagesSwot Analysis OF Tata Motors: Organisational BehaviourbawamatharooNo ratings yet
- Aviation Carbon Footprint Profile Generator - Airlines (Dom/Int) (Excel 2010)Document3 pagesAviation Carbon Footprint Profile Generator - Airlines (Dom/Int) (Excel 2010)Dave SouthgateNo ratings yet
- Electric Buses The Ultimate EVsDocument17 pagesElectric Buses The Ultimate EVsGuilherme Moreira RaimundoNo ratings yet
- Aehq6547-00 - LR Electric TruckDocument4 pagesAehq6547-00 - LR Electric TruckEducacion Laboral AvanzadaNo ratings yet
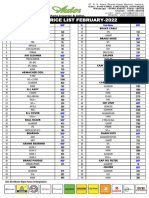
- HERO Price List February-2022Document5 pagesHERO Price List February-2022Md. Salim UddinNo ratings yet
- SR220 SR250 SV250 SV300 - GBDocument2 pagesSR220 SR250 SV250 SV300 - GBXavier WalhemNo ratings yet
- Manado Airport Information GuideDocument12 pagesManado Airport Information GuideAdjie PangestuNo ratings yet
- Underground Mining - Equipment - v1.1 - 03.13.14 - Part - ADocument29 pagesUnderground Mining - Equipment - v1.1 - 03.13.14 - Part - AFreddy Martínez AvendañoNo ratings yet
- Topic - Development of Urban Spaces Under Flyovers and BridgesDocument21 pagesTopic - Development of Urban Spaces Under Flyovers and BridgesSaad S'khan Pathan100% (2)
- Irc ListDocument16 pagesIrc ListMegha PatidarNo ratings yet
- KalmarDocument2 pagesKalmarhse grogolNo ratings yet
- FC 50 CalibracionDocument5 pagesFC 50 CalibracionSamuel CastilloNo ratings yet
- AS440S42T FP LT XP - Low-Chassis Tractor 4x2Document14 pagesAS440S42T FP LT XP - Low-Chassis Tractor 4x2Dan RosoiuNo ratings yet
- Iconic Nissan Skyline GT-R Sports CoupeDocument3 pagesIconic Nissan Skyline GT-R Sports CoupeIbrahim Ab RasNo ratings yet
- Rivian R1T - Abdul RehmanDocument10 pagesRivian R1T - Abdul RehmanAbdul RehmanNo ratings yet
- ReportFolder 22494 XXXXX XXXX 70 Flight Performance and Planning Versuch 1Document66 pagesReportFolder 22494 XXXXX XXXX 70 Flight Performance and Planning Versuch 1angelNo ratings yet
- 00 VFRhrbet 18 SC WEBDocument1 page00 VFRhrbet 18 SC WEBsasha_saleNo ratings yet