You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- SeniorDocument29 pagesSeniorRishi KeshNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Our Farewell..Document54 pagesOur Farewell..Rishi KeshNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Satellite Trainer Stc10Document2 pagesSatellite Trainer Stc10Rishi KeshNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Transistor As A RectifierDocument6 pagesTransistor As A RectifierRishi KeshNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Five Point SomeoneDocument4 pagesFive Point Someoneapi-385220733% (3)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- T VDocument1 pageT VRishi KeshNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Xband Microwave Propagation Trainer Mpt10Document2 pagesXband Microwave Propagation Trainer Mpt10Rishi KeshNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Address DecodingDocument11 pagesAddress DecodingAunas ManzoorNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Microprocessor 1Document73 pagesMicroprocessor 1Rishi KeshNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Automatic Street Light Control ReportDocument14 pagesAutomatic Street Light Control ReportSarath Kumar KmrNo ratings yet
- VLSIDocument69 pagesVLSIRishi KeshNo ratings yet
- Satellite Communication Lab Stc24Document3 pagesSatellite Communication Lab Stc24Rishi KeshNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Xband Doppler Radar Training System Dxr10Document2 pagesXband Doppler Radar Training System Dxr10Rishi KeshNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- X Band Doppler Radar Training System Dxr10Document2 pagesX Band Doppler Radar Training System Dxr10Rishi Kesh100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- ETWCDocument10 pagesETWCRishi KeshNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- HPCL PDFDocument7 pagesHPCL PDFSahilJainNo ratings yet
- ET2012Document52 pagesET2012Rishi KeshNo ratings yet
- Frequency Spectrum GuideDocument2 pagesFrequency Spectrum GuideSachin GhodkeNo ratings yet
- Single Electron TransistorDocument15 pagesSingle Electron TransistorRishi KeshNo ratings yet
- Electrical GATE Paper AnalysisDocument4 pagesElectrical GATE Paper Analysiscoep05No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Plug in Vehicle Infrastructure StrategyDocument51 pagesPlug in Vehicle Infrastructure StrategyRishi KeshNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Gate 2013 SolutionDocument31 pagesGate 2013 SolutionManish SinghNo ratings yet
- Transportation Brief HistoryDocument44 pagesTransportation Brief HistoryRishi KeshNo ratings yet
- Information Brochure 2013 NewDocument10 pagesInformation Brochure 2013 NewKaran KumarNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Student Handbook 2012-2013Document42 pagesStudent Handbook 2012-2013Rishi KeshNo ratings yet
- Applicant FormDocument2 pagesApplicant FormRishi KeshNo ratings yet
- Performance Highlight 200708Document12 pagesPerformance Highlight 200708Rishi KeshNo ratings yet
- Registration For ClassRoom ECE EEE in HyderabadDocument4 pagesRegistration For ClassRoom ECE EEE in HyderabadRishi KeshNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- ADVT No - DMRC O M 1 2013Document5 pagesADVT No - DMRC O M 1 2013ROHITCHOURASIYANo ratings yet
- LabDocument37 pagesLabRishi KeshNo ratings yet
- 7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFDocument25 pages7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFNestor Gómez RojasNo ratings yet
- Port ServicesDocument11 pagesPort ServicesIsabelle Bañadera LcbNo ratings yet
- PT500 BNAAC UpgradeDocument4 pagesPT500 BNAAC UpgradeZaw Khaing WinNo ratings yet
- 13326 - Electrónica de Potencia (Diplomado Máquinas NavalesDocument20 pages13326 - Electrónica de Potencia (Diplomado Máquinas NavalesSergey MikhailovNo ratings yet
- 1) Introduction To ShippingDocument16 pages1) Introduction To ShippingKevin Jacob,DubaiNo ratings yet
- Improved Efficiency and Reduced Co2Document20 pagesImproved Efficiency and Reduced Co2chrisvakarisNo ratings yet
- COSCODocument5 pagesCOSCOFranklin Omar Saldaña AizpruaNo ratings yet
- SFT Design Manual A4 English 2017 PDFDocument60 pagesSFT Design Manual A4 English 2017 PDFNat Thana AnanNo ratings yet
- Maintain Seaworthiness of The Ship9okeDocument2 pagesMaintain Seaworthiness of The Ship9okeDinda Oktaviana100% (1)
- Container Shipping Market 2016 OutlookDocument18 pagesContainer Shipping Market 2016 OutlookeyaoNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Croatia Pumpe Reference List Marine Pumps 1990-2011 EngDocument6 pagesCroatia Pumpe Reference List Marine Pumps 1990-2011 EngGoce Vasilevski100% (1)
- Gard Guidance On Freight Containers: Jeroen de HaasDocument171 pagesGard Guidance On Freight Containers: Jeroen de HaasnaufragatoNo ratings yet
- What Is Containerization and Explain Its Various TypesDocument4 pagesWhat Is Containerization and Explain Its Various Typesshivamdubey12No ratings yet
- Main Engine Damage 2015 The Swedish ClubDocument14 pagesMain Engine Damage 2015 The Swedish ClubRalf TholenNo ratings yet
- Liner Trade ManagementDocument52 pagesLiner Trade ManagementZizzo AhmedNo ratings yet
- UNCTAD Monographs On Port ManagementDocument29 pagesUNCTAD Monographs On Port ManagementHimanshu Kathuria100% (1)
- Cargo Stowage and Securing - AmendmentsDocument3 pagesCargo Stowage and Securing - Amendmentsmask_goldNo ratings yet
- Port OsakaDocument8 pagesPort OsakaSeitan NicoletaNo ratings yet
- Part I: Ship Builders: Directory 2016Document91 pagesPart I: Ship Builders: Directory 2016nnadoziekenneth5No ratings yet
- Becker Energy-Saving DevicesDocument2 pagesBecker Energy-Saving DevicesjavierzmorNo ratings yet
- Reader - Inland Vessels: Extract of Relevant Passages From The Manual of Danube Navigation", Via Donau (2012)Document22 pagesReader - Inland Vessels: Extract of Relevant Passages From The Manual of Danube Navigation", Via Donau (2012)DickeyNo ratings yet
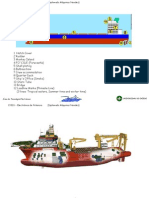
- You and the Sea - TTS Marine Engineering SolutionsDocument12 pagesYou and the Sea - TTS Marine Engineering SolutionsSyaiful AnamNo ratings yet
- A Project Report ON Industry VisitsDocument54 pagesA Project Report ON Industry VisitsAdriya Fellis FurnandaceNo ratings yet
- MSC Agency India PVT LTD: Report On - "Identifying Reasons For Delay in Submission of Shipping Instructions"Document25 pagesMSC Agency India PVT LTD: Report On - "Identifying Reasons For Delay in Submission of Shipping Instructions"AKSHAT JAINNo ratings yet
- Safety Domain Measurement For Vessels in An Overtaking SituationDocument10 pagesSafety Domain Measurement For Vessels in An Overtaking Situationsd ZhangNo ratings yet
- Heavy Equipment ShippingDocument9 pagesHeavy Equipment ShippingStephen HillNo ratings yet
- YDocument24 pagesYobhetzNo ratings yet
- MV "Andrea": Sietas Type 168a-Open Top Container VesselDocument1 pageMV "Andrea": Sietas Type 168a-Open Top Container VesselMeryNo ratings yet
- Major Claims 1997Document97 pagesMajor Claims 1997Mehmet KaptanNo ratings yet
- COSCODocument26 pagesCOSCOVickey VermaNo ratings yet
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (241)
- An Architect's Guide to Construction: Tales from the Trenches Book 1From EverandAn Architect's Guide to Construction: Tales from the Trenches Book 1No ratings yet
- Building Construction Technology: A Useful Guide - Part 1From EverandBuilding Construction Technology: A Useful Guide - Part 1Rating: 4 out of 5 stars4/5 (3)
- Building Construction Technology: A Useful Guide - Part 2From EverandBuilding Construction Technology: A Useful Guide - Part 2Rating: 5 out of 5 stars5/5 (1)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- Civil Engineer's Handbook of Professional PracticeFrom EverandCivil Engineer's Handbook of Professional PracticeRating: 4.5 out of 5 stars4.5/5 (2)
- The Complete Guide to Alternative Home Building Materials & Methods: Including Sod, Compressed Earth, Plaster, Straw, Beer Cans, Bottles, Cordwood, and Many Other Low Cost MaterialsFrom EverandThe Complete Guide to Alternative Home Building Materials & Methods: Including Sod, Compressed Earth, Plaster, Straw, Beer Cans, Bottles, Cordwood, and Many Other Low Cost MaterialsRating: 4.5 out of 5 stars4.5/5 (6)