Professional Documents
Culture Documents
ch4 Microprocesseur PDF
Uploaded by
Sâkly ChihèbOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
ch4 Microprocesseur PDF
Uploaded by
Sâkly ChihèbCopyright:
Available Formats
Partie 4 : Architecture de base d`un microprocesseur
I. Introduction.
Le processeur (microprocesseur) est le composant hardware le plus connu d'un ordinateur.
C'est l'unite intelligente de traitement des inIormations. Son travail consiste a lire des
programmes (des suites d'instructions), a les decoder et a les executer. Le premier
microprocesseur est apparu en 1972. A l'epoque, INTEL invente le 4004, destine a un
constructeur japonais de machine a calculer. Celui-ci le reIuse pour une taille (dimension)
excessive. INTEL le met alors sur le marche sans conviction mais avec le succes que l'on sait.
Les annees 80 voyaient l'emergence de ces circuits avec les Zylog Z80, 6800 de Motorola
(dont les suivants sont utilises encore par les MAC) et le 6500. Avec l'arrivee des PC-XT
d'IBM et l'utilisation du 8088, INTEL devenait matre du marche Iin des annees 80. Deux
types de processeurs sont Iabriques aujourd`hui, le microprocesseur et le microcontrleur.
Au niveau traitement des inIormations, les 2 sont pratiquement equivalents. La distinction
vient des Ionctionnalites internes. Un microcontrleur est dedie aux traitements des entrees /
sorties. De ce Iait, des ports sont rajoutes (parallele et / ou serie suivant les modeles) qui vont
permettre de recevoir ou d'envoyer des inIormations des peripheriques. On pourrait utiliser un
microprocesseur pour les mmes Ionctions mais ceci necessiterait de rajouter des composants
externes pour chaque port externe. Un microcontrleur inclut souvent la programmation de
maniere interne dans une memoire de type ROM et mme de la memoire de travail de type
RAM. Comme un microcontrleur gere des peripheriques lents, il n'est pas optimalise pour la
vitesse de traitement d'inIormations, ni mme pour gerer des quantites de memoire
importantes. L'interIaage du processeur avec l`exterieur necessite 3 bus: un bus de donnees,
un bus d'adresse et un bus de commande. Il existe des processeurs bases sur l'architecture
CISC et d`autres bases sur l`architecture RISC. Les processeurs 8086-8088 sont de types
CISC (Complex Instruction Set Computer). Les premiers concepteurs de processeurs
rajoutaient le plus d'instructions possibles pour permettre a l'utilisateur de peauIiner ses
programmes. Neanmoins, ces multiples instructions ralentissent le Ionctionnement du
microprocesseur et sont peu utilisees en pratique. Actuellement, on utilise de plus en plus de
processeurs RISC (Reduced Instruction Set Computer). Le nombre d'instructions est reduit,
mais executees nettement plus rapidement. Chaque instruction complexe peut tre
programmee par plusieurs instructions simples. La technique actuelle est de charger des
instructions CISC 8086-8088 pour les recoder en instructions RISC plus rapides.
Un processeur est constitue de:
une unite de commande qui lit les instructions et les decode;
une unite de traitement (UAL - unite arithmetique et logique) qui execute les instructions;
d`un ensemble de memoire appeles registres;
d`un bus de donnees externe;
d`un bus d`adresse externe;
d`un bus de commande externe;
d`un bus de donnees interne reliant l`unite de commande l`UAL et les registres.
Lorsque tous ces elements sont regroupes sur une mme puce, on parle alors de
microprocesseur. La Iigure ci dessous donne une idee sur l`architecture interne d`un
microprocesseur. Cette architecture presentee est dite "standard". Il en existe de multiples,
notamment les architectures a plusieurs bus internes ou a Pipeline.
Figure 4.1. Architecture de base de microprocesseur.
Sur cette Iigure nous pouvons voir les 3 bus qui permettent au microprocesseur de
communiquer avec l`exterieur.
II. Composants d`un microprocesseur.
II.1 Lunite de commande.
Elle permet de "sequencer" le deroulement des instructions. Elle eIIectue la recherche en
memoire de l'instruction, le decodage, l'execution et la preparation de l'instruction suivante.
L'unite de commande elabore tous les signaux de synchronisation internes ou externes (bus
des commandes) au microprocesseur.
II.2 Lunite arithmetique et logique (UAL).
C'est l'organe qui eIIectue les operations:
Arithmetiques : addition, soustraction, multiplication, ...
Logiques : et, ou, non, decalage, rotation, ....
Deux registres sont associes a l'UAL : l'accumulateur et le registre d'etat.
II.2.1 Laccumulateur (nomme . A).
C'est une des deux entrees de l'UAL. Il est implique dans presque toutes les operations
realisees par l'UAL. Certains constructeurs ont des microprocesseurs a deux accumulateurs
(Motorola : 6800).
Exemple : A etant l'accumulateur et B un registre, on peut avoir : AB (ADD A,B : addition
du contenu du registre A avec celui du registre B, le resultat etant mis dans A)
II.2.2 Le registre detat (Flags . F)
A chaque operation, le microprocesseur positionne un certain nombre de bascules d'etat. Ces
bascules sont appelees aussi indicateurs d'etat ou drapeaux (status, Ilags). Par exemple, si une
soustraction donne un resultat nul, l'indicateur de zero (Z) sera mis a 1. Ces bascules sont
regroupees dans le registre d'etat
On peut citer comme indicateurs:
- retenue (carry : C)
- retenue intermediaire (Auxiliary-Carry : AC)
- signe (Sign : S)
- debordement (OverIlow : O)
- zero (Z)
- parite (Parity : P)
II.2.2.1 Retenue . (carrv . C).
Exemple: addition de nombres binaire sur 8 bits
11111100 FCH
10000010 82H
carry : 1 01111110 carry : 1 7EH
Sur cet exemple, nous pouvons remarquer que le resultat sur 8 bits est Iaux (7EH). TouteIois
le bit de retenu expulse n`est pas deIinitivement perdu. Ce bit C (carry) est stocke dans le
registre d`etat est peut tre teste par l`utilisateur. De la mme maniere lors d'une operation de
decalage ou de rotation ce bit peut tre positionne en cas de debordement. Par exemple, soit le
decalage a gauche sur d'un bit de cet octet : 10010110, apres le decalage nous avons
00101100. En ce qui concerne le carry, il va tre positionne a 1, puisque le bit expulse est egal
a 1.
II.2.2.2 Retenue intermediaire . (Auxiliarv Carrv . AC).
Sur les operations arithmetiques, ce bit signale une retenue entre groupes de 4 bits (HalI-byte :
demi-octet) d'une quantite de 8 bits.
II.2.2.3 Signe. (S)
Ce bit est mise a 1 lorsque le resultat de l'operation est negatiI (bit de plus Iort poids du
resultat a 1).
II.2.2.4 Debordement . (overflow . O)
Cet indicateur est mis 1, lorsqu'il y a un depassement de capacite pour les operations
arithmetiques en complement a 2. Sur 8 bits, on peut coder de -128 (1000 0000) a 127 (0111
1111).
104 0110 1000 - 18 1110 1110
26 + 0001 1010 - 118 1000 1010
130 1000 0010 (-126) -136 0111 1000 (120) avec C1
Dans cet exemple et dans les deux cas de Iigure (operation a droite ou operation a gauche), le
bit O est positionne a 1. L'indicateur de debordement est une Ionction logique (OU exclusiI)
de la retenue (C) et du signe (S).
II.2.2.5 Le bit Zero . (Zero . Z)
Ce bit est mis a 1 lorsque le resultat de l'operation est nul.
II.2.2.6. Le bit de parite . (P)
Ce bit est mis a 1 lorsque le nombre de 1 de l'accumulateur est pair.
Remarque : La plupart des instructions modiIient le registre d'tat.
Exemple :
ADD A, B positionne les drapeaux : O, S, Z, A, P, C
OR B, C (B ou C -~ B) positionne S, Z, P tandis que
MOV A, B (Move, TransIerer le contenu de B dans A) n'en positionne aucun.
II.3 Les registres.
Il y`a deux type de registres : les registres d'usage general, et les registres d'adresses
(pointeurs).
II.3.1 Les registres dusage general.
Ce sont des memoires rapides, a l'interieur du microprocesseur, qui permettent a l'UAL de
manipuler des donnees a vitesse elevee. Ils sont connectes au bus de donnees interne au
microprocesseur. L'adresse d'un registre est associee a son nom (on donne generalement
comme nom une lettre) A, B,C...
Exemple : MOV C,B: transIert du contenu du registre B dans le registre C.
II.3.2 Les registres dadresses (pointeurs).
Ce sont des registres connectes sur le bus d`adresses. On peut citer comme registre:
- Le compteur ordinal (pointeur de programme PC) ;
- Le pointeur de pile (stack pointer SP) ;
- Les registres d'index (index source SI et index destination DI).
II.3.2.1 Le compteur ordinal (pointeur de programme PC.)
Il contient l'adresse de l'instruction a rechercher en memoire. L'unite de commande
incremente le compteur ordinal (PC) du nombre d'octets sur lequel l'instruction, en cours
d'execution, est codee. Le compteur ordinal contiendra alors l'adresse de l'instruction suivante.
Prenons l`exemple d`un microprocesseur 8086 de INTEL :
Exemple : (PC)10000H ; il pointe la memoire qui contient l'instruction MOV CX,BX qui
est codee sur deux octets (89 D9H) ; l'unite de commande incrementera de deux le contenu du
PC : (PC) 10002H (la memoire sera supposee tre organisee en octets).
Figure 4.2 Compteur de Programme (PC).
II.3.2.2 Le pointeur de plie (stack pointer SP).
Il contient l'adresse de la pile. Celle-ci est une partie de la memoire, elle permet de stocker des
inIormations (le contenu des registres) relatives au traitement des interruptions et des sous-
programmes. La pile est geree en LIFO : (Last IN First Out) dernier entre premier sorti. Le
Ionctionnement est identique a une pile d'assiettes. Le pointeur de pile SP pointe le haut de la
pile (31000H Iigure 4.3), il est decremente avant chaque empilement, et incremente apres
chaque depilement. Il existe deux instructions pour empiler et depiler: PUSH et POP.
exemple: PUSH A empilera le registre A et POP A le depilera. La Iigure suivante montre
l`evolution du pointeur de pile durant l`execution du programme commenant en 12E30H.
Figure 4.3. Principe de fonctionnement de la pile.
Sur cette Iigure le programme commence par sauvegarder le contenu de C dans la pile (PUSH
C). Pour cela (SP) est decremente de deux ((SP)31000H-230FFEH), puis on eIIectue
l'ecriture de (C) dans la memoire a l'adresse (SP) : (30FFEH) 6142H. Pour PUSH A on
obtient : (30FFCH)1234H, et pour PUSH B : (30FFAH)2D5AH. Pour l'instruction POP
B, (SP) est charge dans le registre B (SP30FFAH ; B2D5AH) puis (SP) est incremente de
deux (SP 30FFAH+230FFCH). EnIin, pour POP A on obtient : A1234H et
(SP30FFCH + 2 30FFEH).
II.3.2.3 Les registres dindex (index source SI et index destination DI).
Les registres d'index permettent de memoriser une adresse particuliere (par exemple : debut
d'un tableau). Ces registres sont aussi utilises pour adresser la memoire de maniere diIIerente.
C'est le mode d'adressage indexe.
Exemple :
MOV A,SI+10000H] place le contenu de la memoire d'adresse 10000H le contenu de SI,
dans le registre A.
Figure 4.4. Exemple d`opration sur le registre d'index.
III. Principe d`excution d'une instruction.
Dans cette architecture standard, l`execution d`une instruction se Iait en trois etapes:
-Recherche de l'instruction (Fetch) ;
-Decodage (decode) ;
-Execution (execute).
III.1 Recherche de linstruction.
Le contenu de PC (compteur ordinal) est place sur le bus d`adresse (c'est l'unite de commande
qui etablit la connexion). L'unite de commande (UC) emet un ordre de lecture
(READRD1). Au bout d'un certain temps (temps d'acces a la memoire), le contenu de la
case memoire selectionnee est disponible sur le bus des donnees. L'unite de commande charge
la donnee dans le registre d'instruction pour decodage. Le microprocesseur place le contenu
de PC (10000H) sur le bus d`adresse et met RD a 1 (cycle de lecture). La memoire met sur le
bus de donnees le contenu de sa memoire n 10000H (ici 89D9H qui est le code de
MOV C,B ). Le microprocesseur place dans son registre d'instruction le contenu du bus de
donnees (89D9H). L'unite de commande decode et execute l'instruction MOV C,B.
Figure 4.5 Compteur de Programme (PC).
III.2 Le Decodage de linstruction.
Le registre d'instruction contient maintenant le premier mot de l'instruction qui peut tre
codee sur plusieurs mots. Ce premier mot contient le code opratoire qui deIinit la nature de
l'operation a eIIectuer (addition, rotation,...) et le nombre de mots de l'instruction. L'unite de
commande decode le code operatoire et peut alors executer l'instruction.
III.3 Lexecution de linstruction.
Apres l`execution de l`instruction par micro-programme, les indicateurs sont positionnes (O,
S, Z, A, P, C). L'unite de commande positionne le compteur ordinal (PC) pour l'instruction
suivante.
IV. Les exceptions & Interruptions.
IJ.1 Introduction.
Nous etudions dans cette partie les interruptions materielles (ou externes), c'est a dire
declenchees par le materiel (hardware) exterieur au processeur. Les interruptions permettent
au materiel de communiquer avec le processeur. On peut distinguer deux sortes
d'interruptions. Les interruptions materielles et les interruptions logicielles. Les interruptions
internes, dues a l`execution du programme (division par zero, depassement de capacite d'un
registre, tentative d'acces a une zone memoire protegee, ..) sont considerees comme
interruptions logicielles. Ces interruptions sont souvent appelees exceptions. Les interruptions
ainsi que les exceptions sont toutes traitees de la mme Iaon. La diIIerence vient surtout de la
source d`enclenchement de l`interruption. En eIIet les interruptions materielles et les
exceptions peuvent se produire n'importe quand, tandis que les interruptions logicielles se
produisent a un endroit precis du code ou se trouve une des instructions int ou into ou trap
(a depend du microprocesseur). De plus, les interruptions materielles peuvent tre masquees
(interdites ou autorisees) a l'aide de l'indicateur IF (Registre d`etat). Une interruption externe
est signalee au processeur par un signal electrique sur une des ses pattes prevues pour ceci.
Lors de la reception de ce signal, le processeur ''traite'' l'interruption des la Iin de l'instruction
en cour d`execution. Ce traitement consiste a executer un programme qui est appele
automatiquement lorsque l`interruption survient. L'adresse de debut du programme doit tre
prealablement stockee dans une table dite des vecteurs d'interruptions. Lorsque la routine
d`interruption est executee une instruction IRE1 permet au processeur de reprendre l'execution
a l'endroit ou il avait ete interrompu. Il est aussi possible d'ignorer l`evenement et passer
normalement a l'instruction suivante dans le cas des interruptions masquables. Il est en eIIet
parIois necessaire de pouvoir ignorer les interruptions pendant un certain temps, pour
eIIectuer des traitements plus urgents. Lorsque le traitement est termine, le processeur
demasque les interruptions et les prend alors en compte. La procedure d`interruption est donc
une tache speciale associee a un evenement externe ou interne.
IJ.2 Les interruptions materielles.
IJ.2.1 Cas des processeurs de la famille INTEL.
Les interruptions materielles sont generees par les peripheriques : souris, clavier, disque,
horloge temps reel, etc. A la diIIerence des interruptions logicielles, elles peuvent tre
autorisees ou interdites au moyen de l`indicateur IF du registre d`etat EFLAGS . Comme
le Pentium n`a que deux entrees d`interruption materielle, NMI et INTR, on doit lui adjoindre
un contrleur d`interruption programmable aIin de pouvoir disposer de plusieurs sources
d`interruption avec une gestion de priorite. C`est le PIC (Programmable Interrupt Controler
8259A).
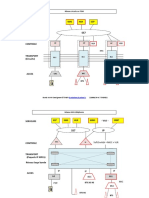
Figure 4.5 Le contrleur d'interruption PIC 8259A.
Figure 4. Schma interne du PIC 8259.
Le 8259A peut accepter les interruptions de 8 sources externes, et on peut gerer jusqu'a 64
sources diIIerentes en cascadant plusieurs 8259A. Il gere la priorite entre les interruptions
simultanees, interrompt le processeur et lui passe un code pour identiIier la source
d'interruption. Une source d'interruption est connectee a chacune des 8 entrees IR0 a IR7.
Selon sa priorite, et s'il n'y a pas d'autre interruption en cour, le PIC decide s'il peut
transmettre l'interruption au CPU. Si oui, il aIIirme la ligne INT, qui est connectee a l'entree
INTR (Interrupt Request) du CPU. Si le CPU est prt a accepter l'interruption, il repond au
PIC via la ligne INTA (Interrupt Acknowledge). Le PIC repond a son tour en envoyant le
numero d'interruption sur les lignes D0 a D7. Ce numero est un index dans la table des
vecteurs d'interruption. Le CPU est maintenant prt a appeler le sous-programme de
traitement d'interruption approprie. Quand le sous-programme de traitement d'interruption a
termine son execution, il en avertit le PIC pour qu'il puisse permettre a d'autres interruptions
d'atteindre le CPU. Les interruptions materielles servent a une gestion eIIicace des
peripheriques d'entree/sortie. Dans un ordinateur moderne, il y a continuellement des
interruptions materielles. Le temporisateur, l'horloge temps reel, les touches du clavier, les
mouvements et les clics de la souris, le modem, l'imprimante, les disques durs et souples, le
CDRom, sont tous des sources d'interruptions. Les circuits contrleurs de peripheriques
contiennent plusieurs registres d'interIace avec le CPU. Il y`a habituellement un registre de
contrle, un registre d'etat, et un ou plusieurs registres de donnees. Pour connatre l'etat d'un
peripherique, le CPU peut interroger le registre d'etat. L'approche des drapeaux (Ilags)
consiste a interroger de Iaon repetitive le registre d'etat, pour savoir ou le peripherique est
rendu dans le transIert des donnees. A-t-il reu une nouvelle donnee ? A-t-il termine la
transmission de la derniere donnee envoyee ? etc. Cette approche consomme trop de temps de
la part du processeur. L'approche interruption est beaucoup plus perIormante. Le peripherique
envoie une interruption materielle au processeur quand il a quelque chose a signaler. Le
processeur interrompt alors la tche en cour, enregistre en memoire l'etat de la machine, et
vient interroger le registre d'etat du peripherique, pour connatre la cause de l'interruption. Il
eIIectue ensuite le traitement approprie et elimine la source de l'interruption Ce traitement
consiste, par exemple, a lire la donnee reue dans le registre de reception et a l'inscrire en
memoire, ou a lire en memoire la prochaine donnee a transmettre et a l'inscrire dans le registre
de transmission du peripherique. Le processeur retourne ensuite a la tche interrompue apres
avoir restaure l'etat de la machine qu'il avait enregistre au moment de l'interruption.
Le sous-programme de traitement a donc 4 tches a executer :
-Sauvegarder l'etat de la machine en empilant les registres susceptibles d'tre modiIies dans le
sous-programme de traitement d'interruption (ISR). Ceci inclut EFLAGS (registre d`etat);
-Interroger le registre d'etat d u peripherique pour savoir quelle operation eIIectuer ;
-Eliminer la source de l'interruption en eIIectuant l'operation d'entree-sortie ;
-Restaurer l'etat de la machine et retourner a la tche interrompue en depilant les registres
empiles.
IJ.2.2 PIC dans le cas du PC.
L`architecture est partiellement Iigee dans le cas des PC (historique par rapport au 286). Le
PIC matre va vers le processeur et le PIC esclave sur la broche 2 du matre.
Figure 4.7 Cascade de deux contrleurs d'interruptions PIC 8259.
Depuis le premier 8088 qui a equipe les PC, les interruptions sont normalisees pour les
peripheriques standard. La derniere composante d'un systeme a microprocesseur est l'acces
direct a la memoire, le DMA (Direct Memory Access). Cette Ionction permet de demander au
processeur de se deconnecter des bus de donnees, adresse et contrle pendant qu'un
peripherique prend le contrle de la memoire. L'arrivee du pseudo Plug & Play de Windows
95/98 et Win2000 couple avec le plug & Play du Bios Iacilite dans certains cas le parametrage
des interruptions, mais il est parIois necessaire de reprendre les conIigurations manuellement
lorsque le nombre de peripheriques augmente. Un peripherique est donc determine de maniere
hardware par une plage d'adresses (parIois une seule adresse), une interruption et
eventuellement un canal DMA. Le 8088-8086 utilisait un 8259 d'INTEL, avec 8 niveaux
d'interruptions notees de IRQ0 a IRQ7. Le 80286 jusqu'aux 486 utilisaient 2 contrleurs 8259
chanes ce qui permet d`avoir 16 sources d`interruptions. Ils sont notes de IRQ0 a IRQ15,
mais avec l'IRQ9 reservee pour le chanage. Depuis les Pentium (et un nouveau circuit
gestionnaire d'interruptions), cette IRQ9 est accessible aux peripheriques, mais ceci explique
que peu de peripheriques ne se branchent par deIaut sur ce niveau d'interruption.
L'interruption non masquable (NMI) est egalement utilisee pour des erreurs de parite ou
erreurs de connecteurs entrees / sorties. Le tableau ci-dessous reprend l'ensemble des adresses
et interruptions normalisees du PC, melangees avec les interruptions utilisees par deIaut
actuellement.
Fonction IRQ Adresse Commentaires
Horloge systeme 0 Ne peut tre modiIie
Clavier 1 Ne peut-tre modiIie
Contrleur d'IRQ programmable 2 Ne peut tre modiIie
Com 2
Com 4
3
2F8-2FF
2E8 - 2EF
ModiIiable avec prudence
Com 1
Com 3
4
3F8-3FF
3E8-3EF
ModiIiable avec prudence
Libre 5
Generalement utilise par la carte son,
egalement LPT2 en 278
Contrleur lecteur de disquette 6 ModiIiable avec prudence
LPT 1
LPT 2
7
378 37A
(pour les produits
de marque)
278 27A
ModiIiable avec prudence. On peut
mettre LPT1 et LPT2 sur la mme
interruption, mais pas d'impressions
simultanees
Horloge: date et heure 8 Pas modiIiable
9
Libre en Pentium et suivant, utilise en
parallele avec IRQ2 dans les 486.
Souvent utilise par les cartes sons
10 (A) Libre
11 (B) Libre
12 (C) Libre
Coprocesseur mathematique 13 (D) Ne peut tre modiIie
14 (E) Libre, generalement IDE 1
15 (F) Libre, generalement IDE 2
1ableau 2. Ensemble des interruptions normalises du PC
Souvent les interruptions 14 et 15 sont utilisees par le contrleur de disque dur (une par port
IDE). L'interruption 12 est utilisee par la souris PS2. Le port USB utilise egalement par deIaut
cette interruption 12. Neanmoins, le port USB passe en 11 si une souris PS2 est connectee.
Ces interruptions peuvent tre veriIiees par les outils Iournis par les systemes d'exploitation et
pour certaines, elles sont aIIichees lors du demarrage de la majorite des PC. La veriIication
dans les PC sous DOS passe par le programme MSD.exe situe en c:\DOS. Dans le cas de
Windows cet utilitaire est situe dans le panneau de conIiguration. Il permet les mmes
veriIications, mais de maniere plus etendues. Depuis Win98, un nouvel utilitaire, Outils
systemes MicrosoIt, situe dans le dossier Outils Systeme du menu Demarrer permet une
meilleure connaissance sur le systeme en cour. En regardant ce tableau, si un PC manque
d'interruptions libre, il est possible d'en recuperer en supprimant des ports de communication.
Si vous n'utilisez pas de ports serie (uniquement USB), vous pouvez rendre inactiI COM 1 et
Com 2 (disabled) et recuperer les interruptions 3 et 4. Idem pour le port parallele. Si vous
utilisez 2 ports paralleles, vous pouvez mettre l'interruption de LPT2 en 5 (selon la norme) ou
en 7. Si vous utilisez des disques SCSI, pourquoi pas rendre inactiI les ports IDE 1 et IDE2
dans le BIOS (recuperation des INT 14 et 15), ... Comme les systemes d`exploitation
Windows NT, 2000 et XP sont des systemes d'exploitation pleinement proteges, les
application: en mode utilisateur ne peuvent acceder au materiel directement et doivent passer
par un pilote de peripherique Ionctionnant en mode noyau. C'est la couche HAL (Hardware
Abstraction Layer) de NT qui gere les interruptions. La realisation de tels pilotes de
peripheriques depasse touteIois le cadre de ce cours. Cependant, les VDD (Virtual Device
Drivers) emulent les applications 16 bits de MS-DOS. Ils piegent ce que l'application MS-
DOS croit tre des reIerences a des ports d'entree-sortie et les traduisent en Ionctions natives
d'entree-sortie Win32. L'application intitulee Invite de commande ou, en anglais, DOS
prompt, est un tel VDD. On peut y executer la plupart des programmes ecrits pour MS-DOS,
y compris certains qui utilisent des interruptions materielles. C'est le cas des exemples qui
suivent que vous pouvez compiler avec un assembleur tel que A86, MASM ou TASM. En
mode protege, le processeur va plutt lire la table des descripteurs d'interruption IDT
(Interrupt Descriptor Table). L'adresse de cette table est contenue dans le registre IDTR. Elle
contient des descripteurs de 64 bits pour les sous-programmes de traitement d'interruption.
Ces descripteurs sont appeles Trap Gates dans le cas d'interruptions logicielles. La procedure
qui veut utiliser ces instructions doit avoir un niveau de privilege lui permettant d'acceder au
descripteur d'interruption de la table IDT pour le numero de trappe en question. Ainsi, si une
application de niveau 3 veut executer int 47, il Iaut que le descripteur a IDT(47) ait DPL3.
Dans un systeme d'exploitation tel que Windows NT, la IDT se trouve en memoire protegee,
de sorte qu'il n`est pas possible d'aller ecrire un descripteur directement dans la IDT.
Windows NT ne supporte pas non plus les INT 0x21 de MS-DOS. TouteIois, Il est possible
de les essayer en ecrivant un programme assembleur et en l'executant dans la Ientre Invite
de commande (DOS prompt). En particulier, si nous desirons implanter notre propre sous-
programme de traitement d'interruption logicielle, l'appel systeme int 21h (33) Ionction 25h
permet de le Iaire Iacilement.
IJ.3 Les interruptions logicielles.
Comme nous l`avions ecrit plus haut, les interruptions logicielles, sont aussi appelees trappes
ou deroutements. Elles incluent aussi les Iautes et les arrts. Une Iaute se produit quand le
processeur detecte une erreur durant le traitement d'une instruction. Par exemple, division par
0, opcode invalide, etc. En mode reel (Mode 8086), quand le processeur rencontre une
instruction telle que int immed8 (immed8 : constante sur un octet), il va lire la table des
vecteurs d'interruption IVT (Interrupt Vector Table). Cette table de 1 Ko est situee a l'adresse
0000:0000. Chaque entree de la table contient le numero de segment de 16 bits et l'oIIset de
16 bits pour l'adresse d'un sous- programme de traitement d'interruption (Interrupt Service
Routine ou ISR). Immed8 est utilise comme indice dans cette table (on doit le multiplier par 4
pour avoir l'adresse physique correspondante). De plus, le registre d`etat FLAGS et les
registres de segment CS et d`instructions IP sont empiles dans cet ordre exact, puis les
indicateurs TF et IF sont mis a 0. Le sous-programme d'interruption devra se terminer par
l'instruction IRET, pour depiler correctement ces parametres. L'execution se poursuit ensuite
a l'adresse contenue dans la table. Par exemple, int 8 ira lire le vecteur situe a l'adresse 32
(0x20) et branchera a l'adresse qui y est contenue. A cette adresse doit debuter un sous-
programme de traitement d'interruption. Certaines ISR Iont partie du systeme d'exploitation et
sont deja deIinies, comme celles qui correspondent aux INT 0x21 de MS-DOS. Cette trappe y
sert de mecanisme d'appel au systeme d'exploitation. Si vous voulez deIinir votre propre sous-
programme de traitement d'interruption, il suIIit d'aller ecrire son adresse a l'endroit approprie
dans la table des vecteurs d'interruption avant de l'utiliser.
Figure 4.8 Principe d'excution des interruptions
Exemple 1 : Interruption logicielle pour ecrire une chane a l'ecran :
mov ah,09
mov dx, oIIset string
int 33
ou on a deIini la chane de caracteres string comme suit :
string db 'Toto':$'
Exemple 2: Interruption logicielle pour la lecture de l'horloge systeme.
L'horloge systeme interrompt le processeur 18,2 fois par seconde si l'indicateur d'interruption
IF est 1 (interruption materielle 08). Chaque Iois, le compteur de 32 bits situe aux adresses
0040:006C et 0040:006E est incremente de 1. Pour lire ce compteur, on peut utiliser
l'interruption logicielle int 0x1A (26).
mov ah, 0 ; mode lecture de l'horloge
int 26 ; appel a l'interruption d'horloge de MS-DOS
Apres l'instruction int 26,
cx TIMER-HIGH mot de poids Iort du compteur
dx TIMER-LOW mot de poids Iaible du compteur
Si al 0, on n'a pas depasse 24h depuis la derniere lecture
Si al > 0, on a depasse 24h depuis la derniere lecture.
Exemple 3: Interruption logicielle pour l`ecriture d`un programme resident et deviation de
l'interruption d'horloge temps reel.
Voici un exemple d'un programme resident qui utilise l'horloge temps reel et emet un bip
chaque 10 sec. La procedure de traitement de l'interruption 8 est deviee pour executer notre
sous-programme, puis continue avec l'ancienne procedure. Cette technique s'appelle un
hook.
start segment
org 100h
main: jmp short install
oldint8 dd ? ; espace pour ancien vecteur
counter dw 182 ; 182 * 54,94 ms 10 sec.
newint8 proc ; nouvellSR pour interruption 8
dec cs:counter ; decrementer compteur
jnz done ; on ne Iait rien tant que count ~ 0
mov cs:counter,182 ; reinitialiser compteur
mov ah, 0Eh ; emettre un bip
mov al, 7
int 10h
done: jmp cs:oldint8 ; continuer dans l'ancien vecteur
newint8 endp
; la partie suivante ne sera executee qu'une Iois, lors de l'installation
install proc near
mov ah, 35h ; charger CS:IP pour interruption 08
mov al, 08h ; IP va dans BX et CS dans ES
int 21 h
mov word ptr oldint8, bx ; enregistrer dans espace prevu
mov word ptr oldint82, es
mov dx, oIIset newint8 ; ou lea dx, newint8
mov ah, 25h ; deIinir CS:IP pour nouvelle
mov al, 08h ; interruption 8
int 21h ; DX IP, DS CS par deIaut
mov dx, (oIIset install -oIIset start) ; taille du progr. resident
add dx, 15 ; arrondir a multiple de 16
shr dx, 4 ; division par 16
mov ah,31h ; rendre resident
int 21 h
install endp
start ends
end main
V. Le logiciel.
J.1 Introduction.
Un langage informatique, par opposition aux langages naturels comme le Iranais ou
l'anglais, est un langage structure utilise pour decrire des actions (ou algorithmes) executables
par un ordinateur. La principale diIIerence entre les langages inIormatiques et les langues
naturelles reside dans l'absence d'ambigutes : alors que certaines phrases du Franais peuvent
tre interpretees diIIeremment par diIIerents auditeurs, tous seront d'accord pour dire ce que
Iait un programme donne. Historiquement, le premier langage inIormatique a ete l'assembleur.
Or, la programmation en assembleur est souvent Iastidieuse, surtout pour des programmes
importants. Plus grave, un programme ecrit en assembleur depend etroitement du type de
machine pour lequel il a ete ecrit. Si l'on desire l'adapter a une autre machine (''porter'' le
programme), il Iaut le reecrire entierement. C'est pour repondre a ces problemes qu'ont ete
developpes des les annees 50 des langages de plus haut niveau. Dans ces langages, le
programmeur ecrit selon des regles strictes mais dispose d'instructions et de structures de
donnees plus expressives qu'en assembleur. Par exemple, dans certains langages comme
MATLAB, on pourra ecrire en une ligne que l'on desire multiplier deux matrices, alors que le
programme correspondant en assembleur prendrait quelques centaines de lignes. On distingue
grossierement deux Iamilles de langages inIormatiques, les langages interpretes et les
langages compiles. Un programme en langage interprete va tre traduit au Iur et a mesure de
son execution par un interpreteur. Un interpreteur est un programme charge de decoder
chaque instruction du langage et d'executer les actions correspondantes. Dans le cas de
programmes compiles, la traduction en langage machine a lieu une Iois pour toute. Le
compilateur (traducteur) traduit chaque instruction du langage en une suite plus ou moins
complexe d'instructions en langage machine. Les programmes compiles s'executent ainsi plus
rapidement que les programmes interpretes, car la traduction est deja Iaite. On perd cependant
en souplesse de programmation, car les types de donnees doivent tre connus au moment de la
compilation. Un compilateur traduit un programme source ecrit dans un langage de haut
niveau (par exemple C) en un autre programme dans un langage de bas niveau (par exemple
l'assembleur). Cette operation de traduction est assez complexe; les compilateurs sont des
programmes sophistiques, qui ont beaucoup progresse ces dernieres annees. Les principaux
langages compiles sont :
C/C programmation systeme et scientiIique;
ADA logiciels embarques;
Cobol gestion;
Fortran calcul scientiIique;
Pascal enseignement.
1ableau 3. Quelques langages compils.
BASIC bricolage;
LISP ''Intelligence ArtiIicielle'';
Prolog idem;
Perl traitement de Iichier textes;
Python programmation systeme, internet;
Java ''applets'' internet;
MATLAB calcul scientiIique;
Mathematica idem.
1ableau 4. Quelques langages interprts.
Notons que la distinction compile/interprete est parIois Iloue. Certains langages, comme
LISP, Java ou Python, peuvent subir une premiere phase de compilation vers un langage
intermediaire (bvtecode), qui sera lui mme interprete.
J.2 Les langages primitifs.
Toutes les inIormations manipulees par le micro-ordinateur sont codees sous la Iorme de mots
binaires (Iormats courants 8, 16 bits, 32 bits) Voici par exemple a quoi peut ressembler un
programme en langage machine: A1 01 10 03 06 01 12 A3 01 14.
Il s'agit de la representation hexadecimale d'un programme permettant d'additionner les
valeurs de deux cases memoire et de stocker le resultat dans une troisieme case. Il est evident
que ce type d'ecriture est diIIicilement lisible par nous, humains. Ainsi, puisque toutes les
instructions que le processeur peut eIIectuer sont associees a une valeur binaire chacune, on
utilise une notation symbolique sous Iorme textuelle qui correspond a chaque Ionction, c'est
ce que l'on appelle le langage assembleur. Dans l'exemple precedent la sequence A1 01 10
signiIie copier le contenu de la memoire a l'adresse 0110h dans le registre AX du processeur.
Cela se note en langage assembleur: MOV AX, 0110h]
Toutes les instructions ont une notation symbolique associee (Iournie par le Iabricant du
processeur). L'utilisation du langage assembleur consiste donc a ecrire sous Iorme symbolique
la succession d'instructions (precedees de leurs adresses pour pouvoir reperer les instructions
et passer Iacilement de l'une a l'autre). Ces instructions sont stockees dans un Iichier texte (le
Iichier source) qui, grce a un programme speciIique (appele "assembleur") sera traduit en
langage machine. Le programme precedent ecrit en langage assembleur donnerait:
Adresse de
l'instruction
Instruction en
langage machine
Instruction en
langage assembleur
Commentaires sur l'instruction
0100 A1 01 10 MOV AX, |0110h|
Copier le contenu de 0110h dans
le registre AX
0103 03 06 01 12 ADD AX, |0112h|
Ajouter le contenu de 0112h a
AX et mettre le resultat dans AX
0107 A3 01 14 MOV |0114h|, AX
Stocker AX a l'adresse memoire
0114h
L'ecriture en langage assembleur, bien que restant rebutante, est beaucoup plus
comprehensible pour un humain, car on a generalement moins de mal a retenir un nom qu'un
numero... Le programme doit tre saisi dans un Iichier texte non Iormate (c'est-a-dire sans
caracteres en gras, souligne, avec des polices de caracteres de diIIerentes tailles, ...) appele
Iichier source. En eIIet, l'assembleur (le programme permettant de Iaire la traduction du
langage assembleur en langage machine) permet uniquement de creer un Iichier assemble a
partir du Iichier source (il devra comporter l'extension .ASM, en s'appelant par exemple
source.asm ou n'importe quel autre nom suivi de l'extension .asm). L'assembleur va Iournir un
fichier obfet (dont l'extension est .obj) qui va contenir l'ensemble des instructions traduites en
instructions machines. Ce Iichier .OBJ ne pourra touteIois pas s'executer directement car il
Iaut encore lier les diIIerents Iichiers. En eIIet il est possible de construire un executable a
partir de plusieurs Iichiers sources (a partir d'un certain niveau de programmation il devient
interessant de creer des Iichiers contenant des Ionctions...). Ainsi, mme si nous avons un seul
Iichier objet il nous Iaudra utiliser un programme (appele editeur de liens) qui va nous
permettre de creer un Iichier executable (dont l'extension sera .exe). Comme dans tout
programme le Iichier source doit tre saisi de maniere rigoureuse. Chaque deIinition et chaque
instruction doivent ainsi s'ecrire sur une nouvelle ligne (pour que l'assembleur puisse les
diIIerencier). Le Iichier source contient:
- Des deIinitions de donnees declarees par des directives (mots speciaux interpretes par
l'assembleur, nous les etudierons plus tard, le but est ici de donner une idee de ce a quoi
ressemble un Iichier source). Celles-ci sont regroupees dans le segment de donnees delimite
par les directives SEGMENT et ENDS ;
- Puis sont placees les instructions (qui sont en quelques sortes le cour du programme), la
premiere devant tre precedee d'une etiquette, c'est-a-dire un nom qu'on lui donne. Celles-ci
sont regroupees dans le segment dinstructions delimite par les directives SEGMENT et
ENDS ;
- EnIin le Iichier doit tre termine par la directive END suivi du nom de l'etiquette de la
premiere instruction (pour permettre au compilateur de connatre la premiere instruction a
executer ;
Les points-virgules marquent le debut des commentaires, c'est-a-dire que tous les caracteres
situes a droite d'un point virgule seront ignores. Voici a quoi ressemble un Iichier source
(Iichier .ASM):
donnees SEGMENT ; voici le segment de donnees dont l'etiquette est donnees
;Placez ici les declarations de donnees
donnees ENDS ; ici se termine le segment de donnees
ASSUME DS:data, CS: code
instr SEGMENT ; voici le segment d'instructions dont l'etiquette est instr
;placez ici votre premiere instruction avec une etiquette
debut
debut :
;Placez ici vos instructions
instr ENDS ; Iin du segment d'instructions
END debut ; Iin du programme suivie de l'etiquette de la premiere instruction
J.2.1 La declaration dun segment.
Comme nous le verrons plus loin, les donnees sont regroupees dans une zone de la memoire
appele segment de donnees, tandis que les instructions se situent dans un segment
dinstructions. Le registre DS (Data Segment) contient le segment de donnees, tandis que le
registre CS (Code Segment) contient le segment d'instructions. C'est la directive ASSUME
qui permet d'indiquer a l'assembleur ou se situe le segment de donnees et le segment de code.
Puis il s'agit d'initialiser le segment de donnees:
MOV AX, nomdusegmentdedonnees
MOV DS, AX
J.2.2 A quoi ressemble une instruction?
L'instruction est l'element cle de l'ordinateur car c'est elle qui permet de speciIier au
processeur l'action a eIIectuer. Toutes les instructions sont stockees en memoire et un
compteur dans le processeur permet de passer de l'une a l'autre. Une instruction est composee
de deux elements:
le code operation: action a eIIectuer par le processeur;
le champ operande: donnee ou bien adresse de la case memoire contenant une donnee.
La taille d'une instruction, c'est-a-dire le nombre de bits qu'elle occupe en memoire depend de
l'instruction et de l'operande, elle est generalement de quelques octets (1 a 4). L'octet est
l'unite qui est utilisee generalement car elle est pratique pour le stockage de certaines donnees
(notamment les caracteres).
J.2.3 Les tvpes dinstructions.
code operation champ operande
L'ensemble des instructions est appele feu dinstruction. On peut les repartir selon plusieurs
categories selon le type d'action que son execution declenche.
J.2.3.1 Instructions daffectation.
Les instructions d'aIIectations permettent de Iaire des transIerts de donnees entre les registres
et la memoire, c'est-a-dire:
soit une ecriture (du registre vers la memoire)
soit une lecture (de la memoire vers un registre)
J.2.3.2 Instructions arithmetiques et logiques.
Ce type d'instructions porte sur le registre AX (l'accumulateur). Elles permettent d'eIIectuer
une operation entre le registre AX et une donnee puis stocker le resultat dans AX. Ces
instructions sont:
- l'addition: AX AX donnee
- la soustraction: AX AX - donnee
- incrementation: AX AX 1
- decrementation: AX AX - 1
- decalage a gauche
- decalage a droite
J.2.3.3 Instructions de comparaison.
Permet de comparer le registre AX a une donnee. Le resultat de la comparaison est indiquee
par les indicateurs (registre d`etat : Flags). Ces instructions (ainsi que les instructions de
branchements) sont necessaires pour permettre une "interactivite", c'est-a-dire qu'en Ionction
de certains parametres le programme va pouvoir avoir divers comportements. Sans ces
indicateurs les programmes auraient un comportement determine et le programme Ierait
constamment les mmes actions.
J.2.3.4 Les modes dadressage.
On appelle "mode d'adressage" la maniere dont la donnee est speciIiee dans une instruction.
Selon le mode d'adressage la taille de l'instruction peut varier de 1 a 4 octets.
Il existe 5 modes d'adressage:
le mode d'adressage implicite
le mode d'adressage immdiat
le mode d'adressage relatif
le mode d'adressage direct
le mode d'adressage indirect
J.2.3.4.1 Le mode dadressage implicite.
Le mode d'adressage implicite correspond a une instruction ne comportant pas d'operande.
L'instruction est composee du code operation uniquement et sa taille peut varier entre 1 octet
et 2 octets selon l'operation.
code operation (1 ou 2 octets)
Ce type d'instructions porte generalement sur des registres. Les operations d'incrementation
ou de decrementation d'un registre on un mode d'adressage implicite.
J.2.3.4.2 Le mode dadressage immediat.
On parle de mode d'adressage immediat lorsque le code operande contient une donnee. La
taille de la donnee peut varier entre 1 et 2 octets.
code operation (1 ou 2 octets) code operande (1 ou 2 octets)
Ce type d'instructions met en jeu un registre et une valeur (qu'il s'agisse d'une aIIectation, une
addition, une soustraction ou bien mme une comparaison), la taille de l'operande dependra
donc du type de registre mis en jeu (1 octet pour un registre 8 bits, 2 pour un registre de 16
bits).
Dans le cas de l'instruction MOJ BX,8 l'operande 8 sera codee sur 16 bits puisqu'il Iaut
l'aIIecter a un registre 16 bits (BX).
J.2.3.4.3 Le mode dadressage relatif.
Ce type de mode d'adressage met en jeu un champ operande contenant un entier relatiI (sa
taille est donc un octet).
code operation (1 octet) code operande (1 octet)
On l'utilise pour les operations de saut, l'entier relatiI est appele deplacement, il correspond a
la longueur du saut que le processeur doit eIIectuer dans les instructions.
J.2.3.4.4 Le mode dadressage direct.
Le code operande d'une instruction en mode d'adressage direct, contrairement au mode
d'adressage immediat, contient l'adresse d'une donnee en memoire (au lieu de contenir la
donnee). Une adresse etant codee sur 16 bits, la taille du champ operande est donc de 2 octets.
code operation (1 ou 2 octets) code operande (2 octets)
Il peut s'agir par exemple de l'aIIectation a un registre d'une donnee contenue dans une case
memoire. Ce mode d'adressage provoque un temps d'execution de l'instruction plus long car
l'acces a la memoire principale est plus long que l'acces a un registre.
J.2.3.4.5 Le mode dadressage indirect.
Le mode d'adressage indirect permet d'acceder a une donnee par l'intermediaire d'un registre
(par exemple le registre BX) qui contient son adresse. Son utilite n'est pas apparente a ce
stade, mais l'adressage indirect est tres utile lors de l'utilisation de tableaux (parcours des
cases d'un tableau) car il suIIit d'incrementer BX de la taille d'une case pour passer d'une case
a une autre...En adressage directe, on aIIecte directement au registre accumulateur (AX)
l'adresse d'une donnee : MOX AX, 110h] En adressage indirect, on aIIecte a AX l'adresse
contenue dans le registre BX : MOV AX, BX].
J.2.3.5 Instructions arithmetiques.
Les instructions arithmetiques et logiques sont eIIectuees par l'unite arithmetique et logique. Il
s'agit d`operations directement eIIectuees sur les bits de la donnee que l'on traite. Ces
instructions sont :
- les instructions d'addition;
- les instructions de soustraction;
- les instructions de decalage;
- les instructions de rotation;
- les instructions logiques (ET, OU, ...).
Toutes les operations arithmetiques et logiques modiIient l'etat des indicateurs.
J.2.3.5.1 Instructions daddition.
Les operations arithmetiques se Iont de la mme Iaon en binaire qu'en base decimale. C'est-
a-dire que lorsque l'on depasse la valeur maximale au niveau du bit n (lorsque l'on depasse la
valeur 1) on a une retenue ou un report au bit n1.
Voyons voir cela sur un exemple:
0001
0001
0010
Sur un exemple un peu plus complique:
0010
0011
- - - -
0101
J.2.3.5.2 Instructions de decalage et de rotation.
Ces instructions permettent de decaler d'un cte ou de l'autre les bits des registres
accumulateurs (AX et BX, et donc AH, AL, BH, BL). Cette operation qui semble inutile a en
Iait plusieurs applications tres interessantes, dont:
- permettre de lire un a un les bits du registre (car les bits sortant a gauche positionnent
l'indicateur de retenue CF : bit de retenu);
- permettre une multiplication par 2
n
(en eIIet le Iait de decaler un nombre binaire d'un chiIIre
a gauche le multiplie par 2, ainsi en eIIectuant cette operation n Iois on obtient une
multiplication par 2
n
). Par exemple:
00010 (2 en decimale)
00100 (on decale a gauche on obtient 4)
01000 (on decale a gauche encore une Iois on obtient 8)
- permettre une division par 2
n
(comme precedemment mais en eIIectuant une rotation sur la
droite);
Une opration de dcalage deplace chacun des bits d'un nombre binaire sur la gauche (ou la
droite), mais ceux-ci sortent, c'est-a-dire qu'ils sont deIinitivement perdus, lorsqu'ils arrivent
au bit de poids Iort (ou de poids Iaible). Par exemple:
0001110000 ;
0011100000 (on decale d'un bit a gauche);
0111000000 (on decale d'un bit a gauche);
1110000000 (on decale d'un bit a gauche);
1100000000 (on decale d'un bit a gauche);
1000000000 (on decale d'un bit a gauche).
Une opration de rotation agit comme une operation de decalage a la diIIerence pres que les
bits qui sortent d'un cte rentrent de l'autre. Par exemple:
0001110000 ;
0011100000 (on eIIectue une rotation d'un bit a gauche);
0111000000 (on eIIectue une rotation d'un bit a gauche);
1110000000 (on eIIectue une rotation d'un bit a gauche);
1100000001 (on eIIectue une rotation d'un bit a gauche);
1000000011 (on eIIectue une rotation d'un bit a gauche).
Les operations courantes de rotation et de decalage sont les suivantes:
- RCL registre, 1 (Rotate Carrv Left): EIIectue une rotation des bits sur la gauche en passant
par l'indicateur de retenue CF. Le contenu de CF est introduit a droite, puis le bit de poids Iort
est copie dans CF;
- RCR registre, 1 (Rotate Carrv Right): EIIectue une rotation des bits sur la droite en passant
par l'indicateur de retenue CF. Le contenu de CF est introduit a gauche, puis le bit de poids
Iaible est copie dans CF;
- ROL registre, 1 (Rotate Left): EIIectue une rotation des bits sur la gauche. Le bit de poids
Iort est copie dans CF et reintroduit a droite;
- ROR registre, 1 (Rotate Right): EIIectue une rotation des bits sur la droite. Le bit de poids
Iaible est copie dans CF et reintroduit a gauche;
- SHL registre, 1 (Shift Left): Decale les bits du registre indique de 1 bit vers la gauche. (Les
bits sortants sont transIeres dans l'indicateur de retenue CF mais ne sont pas reintroduits a
droite);
- SHR registre, 1 (Shift Right): Decale les bits du registre indique de 1 bit vers la droite. (Les
bits sortants sont transIeres dans l'indicateur de retenue CF mais ne sont pas reintroduits a
gauche);
Les instructions RCL et RCR permettent de Iaire une lecture bit-a-bit du contenu du registre.
Les instructions SHL et SHR permettent de Iaire respectivement une multiplication par 2
n
et
une division 2
n
, sur des entiers naturels en supposant que n est le nombre de decalages.
J.2.3.5.3 Instructions logiques.
Les instructions logiques sont au nombre de trois (ET, OU et OU ExclusiI). Elles permettent
de Iaire des operations bit-a-bit sur des nombres binaires (c'est-a-dire en considerant chacun
des bits independamment des autres, sans se soucier de la retenue). Ce type d'instruction se
note de la maniere suivante: INSTRUCTION destination, source. Avec destination designe
le registre ou l'adresse de la case memoire qui contiendra le resultat de l'operation et source
peut tre aussi bien un registre, une constante ou une adresse.
L'instruction AND (ET) multiplie les bits de mme poids deux a deux et stocke le resultat
dans le registre de destination. Cette instruction met donc le bit du resultat a 1 si les deux bits
de mme poids de la source et de la destination sont tous deux a 1, sinon il le met a zero. Par
exemple:
0101
ET 0110
- - - -
0100
L'instruction OR (OU) met le bit du resultat a 0 si les deux bits de mme poids de la source et
de la destination sont tous deux a 0, sinon il le met a un. Par exemple:
0101
OU 0110
- - - -
0111
L'instruction XOR (OU ExclusiI) met le bit du resultat a 1 si un des deux bits de mme poids
de la source et de la destination est egal a 1 (mais pas les deux), dans les autres cas il le met a
zero. Par exemple:
0101
0110
- - - -
0011
Chacune de ces instructions a de tres nombreuses applications, il serait impossible de toutes
les enumerer. En voici quelques unes:
- Masquage: Il est possible de masquer, c'est-a-dire mettre a zero tous les bits qui ne nous
interessent pas dans un nombre. Pour cela il Iaut creer une valeur masque: un nombre dont les
bits de poids qui nous interessent sont a 1, les autres a 0. Il suIIit alors de Iaire un AND entre
le nombre a masquer et le masque pour ne conserver que les bits auxquels on s'interesse. Par
exemple, imaginons que l'on veuille masquer les 4 bits de poids Iaible (les 4 derniers bits)
d'un nombre code sur 8 bits (par exemple 10110101). Il suIIit d'appliquer le masque
11110000, et l'on obtiendra 10110000. On ne conserve bien que les 4 premiers bits, les autres
sont mis a zero.
- Inversion: Il est possible d'inverser tous les bits d'un nombre en Iaisant un XOR avec un
nombre contenant que des 1.
J.2.3.6 Instructions de branchement.
On appelle saut (ou branchement) en assembleur le Iait de passer a une instruction autre que
celle qui suit celle en cour en memoire. En eIIet, en temps normal (c'est-a-dire sans
instruction contraire) le processeur execute les instructions sequentiellement, il execute
l'instruction situee a l'emplacement memoire suivant. C'est un registre special (le registre IP)
qui indique l'adresse de l'instruction suivante a executer. Dans certaines conditions il peut tre
interessant de "choisir" la prochaine instruction a eIIectuer. Ce type de condition peut
notamment se rencontrer dans les structures conditionnelles (saut si...) ou bien dans les
structures de boucle (en eIIet dans le cas ou on desire executer un grand nombre de Iois une
instruction il peut tre interessant d'utiliser une instruction de branchement, qui indique au
processeur l'adresse de la prochaine instruction a executer au lieu de gaspiller la memoire en
stockant plusieurs Iois la mme instruction en memoire). Lors de l'execution "normale" d'un
programme, le processeur lit l'adresse contenue dans le registre IP, incremente celui-ci pour
qu'il pointe vers l'instruction suivante, puis execute l'instruction contenue a l'adresse qu'il
vient de lire. Lorsqu'il rencontre une instruction de saut (ou branchement), celle-ci va lui Iaire
modiIier le contenu du registre IP pour qu'il pointe a l'adresse d'une autre instruction On
distingue ces instructions de saut en deux categories suivant que:
- le saut est eIIectue quoi qu'il arrive (saut inconditionnel);
- le saut est eIIectue ou non selon l'etat d'un registre (saut conditionnel).
J.2.3.6.1 Saut inconditionnel.
L'instruction JMP permet d'eIIectuer un saut inconditionnel, c'est-a-dire que cette instruction
va stocker dans le registre IP l'adresse de l'instruction que l'on veut executer. L'operande de
cette instruction (le parametre) est donc l'adresse de l'instruction a laquelle on veut sauter.
Une Iois l'instruction de branchement executee le processeur lit le contenu du registre IP et
saute donc directement a l'adresse de l'instruction que l'on vient de deIinir. On appelle
deplacement (en anglais offset) le nombre d'octets (car il s'agit d'un nombre entier relatiI code
sur 8 bits) qui separent l'instruction suivante de l'instruction visee. Voyons voir cela sur le
programme suivant:
Adresse
Instruction en
assembleur
Commentaire
0100H MOV AX, |120h|
copie le contenu de la case memoire a l'adresse 0120H dans
le registre AX.
0103H JMP 0100h saute a l'adresse 0100.
0104H MOV |120h|, BX instruction non executee a cause du saut precedent...
La valeur du deplacement est ici de: 0100H - 0104H -4.
J.2.3.6.2 Saut conditionnel.
Les instructions de saut conditionnel permettent d'eIIectuer un saut suivant une condition. Si
celle-ci est realisee le processeur saute a l'instruction demandee, dans le cas contraire il ignore
cette instruction et passe automatiquement a l'instruction d'apres, comme si cette instruction
n'existait pas. Les conditions pour chacune de ces instruction sont Ionction de l'etat de
registres speciIiques appeles indicateurs (en anglais flag, ce qui signiIie drapeau).
J.2.4 Les indicateurs.
Les indicateurs sont des registres dont l'etat est Iixe par l'UAL apres certaines operations. Les
indicateurs Iont partie de ce que l'on appelle le registre detat qui n'est pas directement
accessible par les autres instructions, seules des instructions speciIiques permettent de les
manipuler. Voyons voir certains de ces indicateurs:
- CF (Carry Flag):c'est l'indicateur de retenue. Il intervient lorsqu'il y a une retenue apres
une addition ou une soustraction entre des entiers naturels. Lorsqu'il y a une retenue il est
positionne a 1, dans le cas contraire a 0;
- OF (Overflow Flag):cet indicateur (indicateur de debordement: overflow debordement)
intervient lorsqu'il y a un debordement, c'est-a-dire lorsque le nombre de bits sur lesquels les
nombres sont code n'est pas suIIisant et que le resultat d'une operation n'est pas codable avec
le nombre de bit speciIie (il peut par exemple arriver dans ces conditions que la somme de
deux nombres positiIs donnent un nombre negatiI). Dans ce cas l'indicateur OF est positionne
a 1.
- SF (Sign Flag): c'est l'indicateur de signe. SF donne tout simplement le signe du bit de poids
Iort. Or, le bit de poids Iort donne le signe du nombre (1 si le signe est negatiI, 0 s'il est
positiI). Il simpliIie le test du signe d'un entier relatiI;
- ZF (Zero Flag): L'indicateur de zero permet de savoir si le resultat de la derniere operation
etait nul. En eIIet, dans ce cas, l'indicateur ZF est positionne a 1 (0 dans le cas contraire). Il
permet notamment de determiner si deux valeurs sont egales, en eIIectuant leur soustraction,
puis en observant l'etat de l'indicateur de zero;
Voyons voir les etats de ces indicateurs sur un exemple:
0110
0101
- - - -
1011
- OF1 (la somme de deux nombres positiIs est negative;
- ZF0 (le resultat 1011 n'est pas nul);
- SF1 (le signe du resultat est negatiI);
- CF0 (il n'y a pas de retenue.
Les instructions STC et CLC permettent de positionner "manuellement" l'indicateur de
retenue (CF). L'instruction STC (SeT Carry) positionne l'indicateur CF a 1. L'instruction CLC
(CLear Carry) positionne CF a 0.
J.2.4 Instruction de comparaison.
L'instruction CMP permet de tester la valeur d'un registre (Exemple AX) avec une autre
valeur. Sa seule action est de positionner l'indicateur ZF a 1 en cas d'egalite, ou plus
exactement lorsque la soustraction des deux valeurs donne un resultat nul. En ce sens il
eIIectue la mme chose que SUB a la seule diIIerence pres qu'il ne modiIie pas les operandes.
Par exemple, l'instruction: CMP AX, 2 positionne a 1 l'indicateur ZF si la valeur contenue
dans le registre AX vaut 2, dans le cas contraire il le met a zero.
J.2.5 Les instructions de sauts conditionnels.
Les branchements conditionnels (ou sauts conditionnels) permettent au processeur de traiter
l'instruction situee a un emplacement memoire indique si une certaine condition est veriIiee.
Dans le cas contraire (condition non realisee), le processeur ignorera cette instruction, il
traitera donc l'instruction suivante. La (ou les) condition(s) a satisIaire depend(ent) de l'etat
d'indicateurs. Ainsi les branchements conditionnels doivent generalement tre placee apres
une operation qui va modiIier l'etat d'un ou plusieurs indicateurs (une instruction CMP ou
autre). Selon l'intitule de l'instruction, les conditions a satisIaire sont diIIerentes:
- 1A(Jump if above, ce qui signiIie saute si au-dela)EIIectue un saut siZF0 et CF0;
- 1B(Jump if Below, ce qui signiIie saute si en-dea): EIIectue un saut siCF1;
- 1BE(Jump iI Below or Equal, ce qui signiIie saute si en-dea ou egal): EIIectue un saut s
ZF1 ou CF1;
- 1E(Jump iI Equal, ce qui signiIie saute si egalite EIIectue un saut siZF1;
- 1G(Jump if Greater, ce qui signiIie saute si superieur). EIIectue un saut siZF0 et
SFOF;
- 1LE(Jump iI Lower or Equal, ce qui signiIie saute si inIerieur ou egal): EIIectue un saut si
ZF1 ou SF diffrent de OF;
- 1NE(Jump iI Not Equal, ce qui signiIie saute si non-egalite): EIIectue un saut siZF0
J.3 Notion de procedure.
La notion de procedure en assembleur correspond a celle de Ionction en langage C, ou de
sous-programme dans d'autres langages.
Figure 4.9 Appel d'une procdure.
Dans cet exemple, la procedure est nommee calcul. Apres l'instruction B, le processeur passe
a l'instruction C de la procedure, puis continue jusqu'a rencontrer RET et revient a
l'instruction D. Une procedure est une suite d'instructions eIIectuant une action precise, qui
sont regroupees par commodite et pour eviter d'avoir a les ecrire a plusieurs reprises dans le
programme. Les procedures sont reperees par l'adresse de leur premiere instruction, a laquelle
on associe une etiquette en assembleur. L'execution d'une procedure est declenchee par un
programme appelant. Une procedure peut elle-mme appeler une autre procedure, et ainsi de
suite.
J.3.1 Instructions CALL et RET.
L'appel d'une procedure est eIIectue par l'instruction CALL. CALL adressedebutprocedure
L'adresse peut tre sur 16 bits, la procedure est donc dans le mme segment d'instructions ou
sur 32 bits lors d`un appel inter-segment (Far Call). La Iin d'une procedure est marquee par
l'instruction RET. Le processeur passe alors a l'instruction placee immediatement apres le
CALL. RET est aussi une instruction de branchement : le registre IP (pointeur d`instructions)
est modiIie pour revenir a la valeur qu'il avait avant l'appel par CALL. On peut avoir un
nombre quelconque d'appels imbriques, comme sur la Iigure ci dessous. L'adresse de retour,
utilisee par RET, est en Iait sauvegardee sur la pile par l'instruction CALL. Lorsque le
processeur execute l'instruction RET, il depile l'adresse sur la pile (comme POP), et la range
dans IP.
Figure 4.1 Plusieurs appels de procdures imbriqus.
L'instruction CALL eIIectue donc les operations :
- Empiler la valeur de IP. A ce moment, IP pointe sur l'instruction qui suit le CALL.
- Placer dans IP l'adresse de la premiere instruction de la procedure (donnee en argument).
Et l'instruction RET :
- Depiler une valeur et la ranger dans IP.
J.3.2 Declaration dune procedure.
L'assembleur possede quelques directives Iacilitant la declaration de procedures.
On declare une procedure dans le segment d'instruction comme suit :
Calcul PROC near ; procedure nommee Calcul
... ; instructions
RET ; derniere instruction
Calcul ENDP ; Iin de la procedure
Le mot cleI PROC commence la deIinition d'une procedure, near indiquant qu'il s'agit d'une
procedure situee dans le mme segment d'instructions que le programme appelant. L'appel
s'ecrit simplement :
CALL Calcul
En general, une procedure eIIectue un traitement sur des donnees (parametres) qui sont
Iournies par le programme appelant, et produit un resultat qui est transmis a ce programme.
Plusieurs strategies peuvent tre employees :
1. Passage par registre . les valeurs des parametres sont contenues dans des registres du
processeur. C'est une methode simple, mais qui ne convient que si le nombre de parametres
est petit (il y a peu de registres).
2. Passage par la pile . les valeurs des parametres sont empilees. La procedure lit la pile.
J.3.2.1 Passage de parametres par registres.
Exemple avec passage par registre : On va ecrire une procedure ''SOMME'' qui calcule la
somme de 2 nombres naturels de 16 bits. Convenons que les entiers sont passes par les
registres AX et BX, et que le resultat sera place dans le registre AX. La procedure s'ecrit alors
tres simplement :
SOMME PROC near ; AX - AX BX
ADD AX, BX
RET
SOMME ENDP
et son appel, par exemple pour ajouter 6 a la variable var :
MOV AX, 6
MOV BX, var
CALL SOMME
MOV var, AX
J.3.2.2 Passage de parametres par piles.
Exemple avec passage par la pile : Cette technique met oeuvre un nouveau registre, BP (Base
Pointer), qui permet de lire des valeurs sur la pile sans les depiler ni modiIier SP. Le registre
BP permet un mode d'adressage indirect special, de la Iorme :
MOV AX, BP+6]
Cette instruction charge le contenu du mot memoire d'adresse BP+6 dans AX. Ainsi, on lira le
sommet de la pile avec :
MOV BP, SP ; BP pointe sur le sommet
MOV AX, BP] ; lit sans depiler
et le mot suivant avec :
MOV AX, BP+2] ; 2 car 2 octets par mot de pile.
L'appel de la procedure ''SOMME2'' avec passage par la pile est :
PUSH 6
PUSH var
CALL SOMME2
La procedure SOMME2 va lire la pile pour obtenir la valeur des parametres. Pour cela, il Iaut
bien comprendre quel est le contenu de la pile apres le CALL :
SP IP (adresse de retour)
SP2 var (premier parametre)
SP4 6 (deuxieme parametre)
Le sommet de la pile contient l'adresse de retour (ancienne valeur de IP empilee par CALL).
Chaque element de la pile occupe deux octets.
La procedure SOMME2 s'ecrit donc :
SOMME2 PROC near ; AX - arg1 arg2
MOV BP, SP ; adresse sommet pile
MOV AX, |BP2| ; charge argument 1
ADD AX, |BP4| ; ajoute argument 2
RET
SOMME2 ENDP
La valeur de retour est laissee dans AX. La solution avec passage par la pile parait plus lourde
sur cet exemple simple. Cependant, elle est beaucoup plus souple dans le cas general que le
passage par registre. Il est tres Iacile par exemple d'ajouter deux parametres supplementaires
sur la pile. Une procedure bien ecrite modiIie le moins de registres possible. En general,
l'accumulateur est utilise pour transmettre le resultat et est donc modiIie. Les autres registres
utilises par la procedure seront normalement sauvegardes sur la pile. Voici une autre version
de SOMME2 qui ne modiIie pas la valeur contenue par BP avant l'appel :
SOMME2 PROC NEAR ; AX - arg1 arg2
PUSH BP ; sauvegarde BP
MOV BP, SP ; adresse sommet pile
MOV AX, |BP4| ; charge argument 1
ADD AX, |BP6| ; ajoute argument 2
POP BP ; restaure ancien BP
RET
SOMME2 ENDP
Noter que les index des arguments (BP4 et BP6) sont modiIies car on a ajoute une valeur
au sommet de la pile.
J.4 Traduction en assembleur du langage C sur PC.
Nous nous interessons dans cette section a la traduction en assembleur des programmes en
langage C sur PC (processeurs de la Iamille 80x86 que nous avons un etudie auparavant). Le
detail de cette traduction (ou compilation) depend bien entendu du compilateur utilise et du
systeme d'exploitation (DOS, Windows, UNIX,...). Il depend aussi de divers reglages
modiIiables par le programmeur : taille du type int (16 ou 32 bits), modele de memoire utilise
(pointeurs sur 16 ou 32 bits, donnees et code dans des segments diIIerents ou non, etc.).
Nous n'aborderons pas ces problemes dans ce cours (voir la documentation detaillee du
compilateur utilise si besoin), mais nous etudierons quelques exemples de programmes C et
leurs traductions. Le compilateur utilise est Turbo C version 3 (en mode ANSI C) sous
DOS, avec des entiers de 16 bits et le modele de memoire ''small''. Normalement, ce
compilateur genere directement du code objet (Iichier .OBJ) a partir d'un Iichier source en
langage C (Iichier .C ou .CPP). Il est cependant possible de demander l'arrt de la compilation
pour obtenir du langage assembleur (Iichier .ASM). Pour cela, utiliser sous DOS la
commande :
tcc -S exemple.c
Un Iichier exemple.asm est alors cree. Considerons le programme en langage C suivant :
/* Programme EXEMPLE1.c en langage C */
void main(void)
char X 11;
char C 'A';
int Res;
iI (X 0)
Res -1;
else
Res 1;
}
Trois variables, X, C et Res sont deIinies avec ou sans valeur initiale. Ensuite, on teste le
signe de X et range 1 ou -1 dans la variable Res.
Le programme suivant montre la traduction en assembleur eIIectuee par Turbo C.
TEXT SEGMENT byte public 'CODE'
;
; void main(void)
;
ASSUME cs:TEXT
main PROC near
PUSH bp
MOV bp,sp
SUB sp, 4
;
; char X 11;
;
MOV byte ptr |bp-1|, 11
;
; char C 'A';
;
MOV byte ptr |bp-2|, 65
;
; int Res;
; iI (X 0)
;
CMP byte ptr |bp-1|, 0
JGE 186
;
; Res -1;
;
MOV word ptr |bp-4|, 65535
JMP 1114
186:
;
; else
; Res 1;
;
MOV word ptr |bp-4|, 1
1114:
;
; }
;
MOV sp,bp
POP bp
RET
main ENDP
TEXT ENDS
END
Remarquons les points suivants :
1. La Ionction main() est consideree a ce stade comme une procedure ordinaire (PROC
near). C'est plus tard, lors de la phase d'edition de lien, qu'il sera indique que la Ionction
main() correspond au point d'entree du programme (premiere instruction a executer). La
Ionction est terminee par l'instruction RET.
2. On n'utilise pas ici de segment de donnees : toutes les variables sont allouees sur la pile.
3. L'allocation des variables sur la pile s'eIIectue simplement en soustrayant au pointeur SP le
nombre d'octets que l'on va utiliser (ici 4, car 2 variables X et C d'un octet, plus une variable
Res de 2 octets).
4. La ligne X 11 est traduite par :
MOV byte ptr |bp-1|, 11
Noter l'utilisation de byte ptr pour indiquer que BP contient ici l'adresse d'une donnee de taille
octet. Le test iI (X 0) est traduit par une instruction CMP suivie d'un branchement
conditionnel, utilisant une etiquette placee par le compilateur (d'ou son nom etrange :
1114). Chaque langage de programmation doit deIinir une convention de passage des
parametres lors des appels de procedures ou de Ionctions. Cette convention permet de prevoir
l'etat de la pile avant, pendant et apres un appel de Ionction (dans quel ordre sont empiles les
parametres ? Qui est responsable de leur depilement ? Comment est passee la valeur de
retour ?). Etudions a partir d'un exemple simple comment sont passes les parametres lors des
appels de Ionctions en langage C.
/* Programme EXEMPLE2.C */
int maIonction( int x, int y )
return x y;
}
void main(void)
int X 11;
int Y 22;
int Res;
Res maIonction(X, Y);
}
La traduction en assembleur de ce programme (eIIectuee par Turbo C) donne le programme
suivant :
TEXT SEGMENT byte public 'CODE'
;
; int maIonction( int x, int y )
ASSUME cs:TEXT
maIonction PROC near
PUSH bp
MOV bp,sp
;
; return x y;
;
MOV ax, |bp4|
ADD ax, |bp6|
; }
POP bp
RET
maIonction ENDP
;
; void main(void)
;
ASSUME cs:TEXT
main PROC near
PUSH bp
MOV bp,sp
SUB sp,6
; int X 11;
MOV |bp-2|, 11
; int Y 22;
MOV |bp-4|, 22
;
; int Res;
; Res maIonction(X, Y);
PUSH word ptr |bp-4|
PUSH word ptr |bp-2|
CALL maIonction
ADD sp, 4
MOV |bp-6|,ax
; }
MOV sp,bp
POP bp
RET
main ENDP
TEXT ENDS
En etudiant cet exemple, on constate que :
1. la Ionction C ma_fonction() a ete traduite par une procedure assembleur nommee
_ma_fonction, qui lit ses arguments sur la pile a l'aide de la technique que nous avons vue
plus haut.
2. la Ionction ne modiIie pas l'etat de la pile;
3. Avant l'appel de la Ionction (CALL ), les arguments sont empiles (PUSH). Apres le retour
de la Ionction, le pointeur SP est incremente pour remettre la pile dans son etat precedent
(ADD sp, 4 est equivalent a deux instructions POP 2 octets).
5. La valeur retournee par la Ionction est passee dans AX (d'ou l'instruction MOV bp-6], ax).
Le respect des conventions d'appel de procedures est bien entendu tres important si l'on desire
melanger des Ionctions C et des procedures en assembleur.
You might also like
- Raccourcis ClavierDocument3 pagesRaccourcis ClavierKhalid Mac100% (2)
- Cours Ipv6Document78 pagesCours Ipv6abdel dalilNo ratings yet
- TP ScalaDocument2 pagesTP ScalafafaNo ratings yet
- Support TP - Admin Rés Et Environnement Client ServeurDocument75 pagesSupport TP - Admin Rés Et Environnement Client ServeurEne Shi100% (1)
- Série D'exercices N°1 - Chimie - Notion D'avancement D'une Réaction Chimique - Bac M SC Exp (2009-2010) MR Soudani ElyesDocument2 pagesSérie D'exercices N°1 - Chimie - Notion D'avancement D'une Réaction Chimique - Bac M SC Exp (2009-2010) MR Soudani Elyesأبوأحمد الجزيري75% (8)
- Série D'exercices N°1 - Chimie - Notion D'avancement D'une Réaction Chimique - Bac M SC Exp (2009-2010) MR Soudani ElyesDocument2 pagesSérie D'exercices N°1 - Chimie - Notion D'avancement D'une Réaction Chimique - Bac M SC Exp (2009-2010) MR Soudani Elyesأبوأحمد الجزيري75% (8)
- Fiche Pedagogique Les Structures de DonnéesDocument6 pagesFiche Pedagogique Les Structures de DonnéesSâkly ChihèbNo ratings yet
- MahdiaSousse PDFDocument1 pageMahdiaSousse PDFعائشة بيوضNo ratings yet
- Chapitre 3 Cours 1Document33 pagesChapitre 3 Cours 1Rania AkrourNo ratings yet
- Raport de Stage Sur Présentation Siwtch 5500-1.2.3Document21 pagesRaport de Stage Sur Présentation Siwtch 5500-1.2.3Carol MarinhoNo ratings yet
- 6 Séance 3Document5 pages6 Séance 3Gregory CollinNo ratings yet
- 6.3.3.7 Lab - Configuring 802.1Q Trunk-Based Inter-VLAN RoutingDocument8 pages6.3.3.7 Lab - Configuring 802.1Q Trunk-Based Inter-VLAN Routingعاطف غضبانيNo ratings yet
- ZigBee 2PDocument21 pagesZigBee 2PAbdelkhalek BenhimaNo ratings yet
- TP2 Administration Du CME-VoIPDocument4 pagesTP2 Administration Du CME-VoIPkamdem bocheng joelNo ratings yet
- Administration Linux Partie IIIDocument77 pagesAdministration Linux Partie IIIrajae ansariNo ratings yet
- Introduction À L'asynchroneDocument2 pagesIntroduction À L'asynchroneYesmine MakkesNo ratings yet
- Documentation InterruptionsDocument14 pagesDocumentation Interruptionszbhp zNo ratings yet
- Adressage IP v4 - Routage 1 - Exercice Résolu - Sébastien Adam, Un Développeur Hors Du Commun PDFDocument2 pagesAdressage IP v4 - Routage 1 - Exercice Résolu - Sébastien Adam, Un Développeur Hors Du Commun PDFJeanNo ratings yet
- Allocation Dynamique de MémoireDocument43 pagesAllocation Dynamique de Mémoireebelle harryNo ratings yet
- TP HaproxyDocument3 pagesTP HaproxyBAILA ATHIMAN ROLANDNo ratings yet
- Cours TCP-IPDocument25 pagesCours TCP-IPArmos100% (1)
- TD Proc AssembleurDocument2 pagesTD Proc AssembleurWejdène GuedriNo ratings yet
- Examen TP 02-02-2011 CompressedDocument2 pagesExamen TP 02-02-2011 Compressedخالد خالدNo ratings yet
- Installation SAP GUI - WindowsDocument23 pagesInstallation SAP GUI - WindowsOussama LachhabNo ratings yet
- ITN Module 13 094452Document26 pagesITN Module 13 094452Ibrahima Sory BahNo ratings yet
- FR Notice D Utilisation Mapcarev2.476217Document6 pagesFR Notice D Utilisation Mapcarev2.476217Brian QuatreNo ratings yet
- ITE7 Chp10Document20 pagesITE7 Chp10Mamadou yahya BarryNo ratings yet
- Chapitre 9Document12 pagesChapitre 9Mich le TwinsNo ratings yet
- Schemas NGN 1Document8 pagesSchemas NGN 1Danra Emmanuel MarcusNo ratings yet
- Linux - Chap3 Gestion de FichiersDocument60 pagesLinux - Chap3 Gestion de FichiersOuerghiMohamedSaidNo ratings yet
- Projet ScientifiqueDocument18 pagesProjet ScientifiqueAmine LamaneNo ratings yet
- Main 1Document54 pagesMain 1Nejwa ParadNo ratings yet
- Sujet TP SambaDocument2 pagesSujet TP SambaImade EddineNo ratings yet
- Cluster Et Réplication - Les Moyens Techniques de La Haute DisponibilitéDocument6 pagesCluster Et Réplication - Les Moyens Techniques de La Haute Disponibilitékingmo644No ratings yet