You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Airbus A300-600/A310 Landing Gear SystemsDocument190 pagesAirbus A300-600/A310 Landing Gear SystemsRaph 1123No ratings yet
- BTech Seminar on MICROPILES: ADVANCED FOUNDATION ENGINEERINGDocument17 pagesBTech Seminar on MICROPILES: ADVANCED FOUNDATION ENGINEERINGTrudeep DaveNo ratings yet
- Client Needs and Software Requirements V2.2Document43 pagesClient Needs and Software Requirements V2.2Mehmet DemirezNo ratings yet
- Process Control Valves TrainingDocument12 pagesProcess Control Valves TrainingpptmnltNo ratings yet
- Economic DispatchDocument37 pagesEconomic DispatchHasan KurniawanNo ratings yet
- Online Registration Subsidy Apmapb PDFDocument4 pagesOnline Registration Subsidy Apmapb PDFA. D. PrasadNo ratings yet
- CIVIL5 THDocument13 pagesCIVIL5 THA. D. PrasadNo ratings yet
- GIS Data Management & Mapping Potential Limiting Factors to Marten RecolonizationDocument11 pagesGIS Data Management & Mapping Potential Limiting Factors to Marten RecolonizationA. D. PrasadNo ratings yet
- Hasso Plattner D.school. These Are Among The 229 Students From 62 Higher Education Institutions in 10 CountriesDocument1 pageHasso Plattner D.school. These Are Among The 229 Students From 62 Higher Education Institutions in 10 CountriesA. D. PrasadNo ratings yet
- 48215MasonryIntro 3Document44 pages48215MasonryIntro 3A. D. PrasadNo ratings yet
- 1393Document1 page1393A. D. PrasadNo ratings yet
- Employees On Deputation As On 09.04.2015: S.No Name Designa Tion Date of Birth Deputated OrganizationDocument2 pagesEmployees On Deputation As On 09.04.2015: S.No Name Designa Tion Date of Birth Deputated OrganizationA. D. PrasadNo ratings yet
- 1395Document2 pages1395A. D. PrasadNo ratings yet
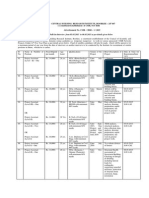
- Invitation For Submission of Research Proposals: Government of India Department of Science and Technology NRDMS DivisionDocument2 pagesInvitation For Submission of Research Proposals: Government of India Department of Science and Technology NRDMS DivisionA. D. PrasadNo ratings yet
- Brochure DOEWS 2016Document5 pagesBrochure DOEWS 2016A. D. PrasadNo ratings yet
- Irrigation Executive Engineers ListDocument10 pagesIrrigation Executive Engineers ListA. D. PrasadNo ratings yet
- Irrigation & CAD DepartmentDocument2 pagesIrrigation & CAD DepartmentA. D. PrasadNo ratings yet
- CEC May June15Document2 pagesCEC May June15A. D. PrasadNo ratings yet
- Department of Civil EngineeringDocument1 pageDepartment of Civil EngineeringA. D. PrasadNo ratings yet
- G D RamtekkarDocument4 pagesG D RamtekkarA. D. Prasad100% (1)
- Research ProjectsDocument14 pagesResearch ProjectsMuthu Vijay DeepakNo ratings yet
- Advt Walkin June2015Document1 pageAdvt Walkin June2015A. D. PrasadNo ratings yet
- Cbri AdvtDocument5 pagesCbri AdvtHariharan MokkaralaNo ratings yet
- MK-CKH VKJ Vecksmdj JK"V H Izks - KSFXDH Lalfkku) Tkyu/KjDocument1 pageMK-CKH VKJ Vecksmdj JK"V H Izks - KSFXDH Lalfkku) Tkyu/KjDeo Karan RamNo ratings yet
- Irrigation & CAD DepartmentDocument2 pagesIrrigation & CAD DepartmentA. D. PrasadNo ratings yet
- Ef ProjectsDocument21 pagesEf ProjectsA. D. PrasadNo ratings yet
- Faculty Contract 2015Document3 pagesFaculty Contract 2015A. D. PrasadNo ratings yet
- National Institute of Technology Karnataka, Surathkal, Mangalore, 575 025Document1 pageNational Institute of Technology Karnataka, Surathkal, Mangalore, 575 025A. D. PrasadNo ratings yet
- WWW - Nitmanipur.ac - in / Admin@nitmanipur - Ac.inDocument5 pagesWWW - Nitmanipur.ac - in / Admin@nitmanipur - Ac.inJeshiNo ratings yet
- Vol9 No2 519-524Document6 pagesVol9 No2 519-524A. D. PrasadNo ratings yet
- Advertisment For Visiting FacultyDocument1 pageAdvertisment For Visiting FacultyA. D. PrasadNo ratings yet
- Advertisement For Adjunct Assistant Professor of PracticeDocument1 pageAdvertisement For Adjunct Assistant Professor of PracticeA. D. PrasadNo ratings yet
- KJ Hannover Workshop2013Document6 pagesKJ Hannover Workshop2013A. D. PrasadNo ratings yet
- Aster Gdem Readme - Ev1.0Document6 pagesAster Gdem Readme - Ev1.0Ivan MendezNo ratings yet
- 638Document5 pages638A. D. PrasadNo ratings yet
- LED Floodlight Technical Data SheetDocument7 pagesLED Floodlight Technical Data SheetVishnu PrajapatiNo ratings yet
- Lesson Plan Template: The Pearl AcademiesDocument3 pagesLesson Plan Template: The Pearl Academiesapi-300023217No ratings yet
- DiMaggio Et Al 2001 Social Implication of The InternetDocument30 pagesDiMaggio Et Al 2001 Social Implication of The InternetDon CorneliousNo ratings yet
- About The Business 1.1 Business Profile Positif CorporationDocument7 pagesAbout The Business 1.1 Business Profile Positif CorporationLinh DalanginNo ratings yet
- Eapp Review PaperDocument3 pagesEapp Review PaperJayy H. Lopez100% (1)
- Hydraulic Cylinder Joints: Understanding Loads and DesignDocument16 pagesHydraulic Cylinder Joints: Understanding Loads and DesignVinaySeebaNo ratings yet
- CERAWeek 2012Document28 pagesCERAWeek 2012kentselveNo ratings yet
- 431510nt PDFDocument14 pages431510nt PDFkbryantperez2012No ratings yet
- Sony MP3 NWZ B143F ManualDocument82 pagesSony MP3 NWZ B143F ManualdummihaiNo ratings yet
- 2012 Price Schedule Fiberfrax Durablanket 2600 - UnifraxDocument2 pages2012 Price Schedule Fiberfrax Durablanket 2600 - UnifraxMagin Idelfonso TorreblancaNo ratings yet
- Bose v. McDonaldsDocument26 pagesBose v. McDonaldsjoemullinNo ratings yet
- International Air Service Development at Boston Logan: June 7, 2012Document20 pagesInternational Air Service Development at Boston Logan: June 7, 2012chaouch.najehNo ratings yet
- Is 9459Document13 pagesIs 9459Anonymous mcHqIfbnV1No ratings yet
- Mechanics of Flight by A.C KermodeDocument2 pagesMechanics of Flight by A.C KermodeJhony BhatNo ratings yet
- Refrigeration Cycles and Systems: A Review: ArticleDocument18 pagesRefrigeration Cycles and Systems: A Review: ArticleSuneel KallaNo ratings yet
- Timeouts PT8.5xDocument21 pagesTimeouts PT8.5xJack WangNo ratings yet
- Strategic MGMT 4Document33 pagesStrategic MGMT 4misbahaslam1986No ratings yet
- The Changing Face of The NewsDocument2 pagesThe Changing Face of The NewsYanaNo ratings yet
- Assignment 5 - AirportDocument2 pagesAssignment 5 - AirportSaroj AcharyaNo ratings yet
- New Microsoft Office Word DocumentDocument3 pagesNew Microsoft Office Word DocumentNajaf BatoolNo ratings yet
- HP Warranty Order Format (WOF) repair parts documentDocument1 pageHP Warranty Order Format (WOF) repair parts documentAnonymous BH8FLrUebNo ratings yet
- Codigos Ford Escape ReneDocument1 pageCodigos Ford Escape ReneKandy KnNo ratings yet
- 300G IM SettingsSheets 20160122Document27 pages300G IM SettingsSheets 20160122zeljkoradaNo ratings yet
- GAZT E-invoice Data DictionaryDocument119 pagesGAZT E-invoice Data Dictionarysahira TejadaNo ratings yet
- Vibration Measuring Instrument: Assignment of Subject NVHDocument28 pagesVibration Measuring Instrument: Assignment of Subject NVHSandeep Kadam60% (5)