You might also like
- On Design and Applications of Digital DifferentiatorsDocument7 pagesOn Design and Applications of Digital DifferentiatorstkbattulaNo ratings yet
- UBICC - Samira - 94 - 608 - 608Document8 pagesUBICC - Samira - 94 - 608 - 608Ubiquitous Computing and Communication JournalNo ratings yet
- Real Coded GA Designs Optimal IIR Digital FiltersDocument10 pagesReal Coded GA Designs Optimal IIR Digital FiltersDhanarasiSyamNo ratings yet
- CIC Filter Introduction: Efficient Decimation and Interpolation Using Cascaded Integrator-Comb FiltersDocument7 pagesCIC Filter Introduction: Efficient Decimation and Interpolation Using Cascaded Integrator-Comb FiltersKaren JohannaNo ratings yet
- Optimal IIR Filter Design Using Novel Particle Swarm Optimization TechniqueDocument12 pagesOptimal IIR Filter Design Using Novel Particle Swarm Optimization TechniquemenguemengueNo ratings yet
- Test Bench For Dynamic Range Testing of AdcDocument9 pagesTest Bench For Dynamic Range Testing of AdcNishant SinghNo ratings yet
- Giroscopios de Fibra ÓpticaDocument9 pagesGiroscopios de Fibra ÓpticaRamón José Pérez MenéndezNo ratings yet
- Direct Digital Frequency Synthesizer With CORDIC AlgorithmDocument12 pagesDirect Digital Frequency Synthesizer With CORDIC AlgorithmYermakov Vadim IvanovichNo ratings yet
- Phase Unwrapping Via IBFS Graph CutsDocument12 pagesPhase Unwrapping Via IBFS Graph CutsLovely BabuNo ratings yet
- Lee Yang ReportDocument14 pagesLee Yang ReportauroshisdasNo ratings yet
- Ilter: IcsiDocument6 pagesIlter: IcsiDiego BardalesNo ratings yet
- Do Cum en To 10348Document14 pagesDo Cum en To 10348Abdul KaderNo ratings yet
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDocument8 pagesNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorNo ratings yet
- Radon Gpu ManuscriptDocument5 pagesRadon Gpu ManuscriptMustafa Berkan BİÇERNo ratings yet
- Cockrum Fall 2008 Final PaperDocument15 pagesCockrum Fall 2008 Final Papernayeem4444No ratings yet
- To Put SlideDocument5 pagesTo Put SlidevivekNo ratings yet
- FFTDocument4 pagesFFTJasim ArNo ratings yet
- InTech-Fractional Delay Digital FiltersDocument27 pagesInTech-Fractional Delay Digital FiltersSidharth MahotraNo ratings yet
- Paper 39Document10 pagesPaper 39ho-faNo ratings yet
- An Instruction Set For The Efficient Implementation of The Cordic AlgorithmDocument4 pagesAn Instruction Set For The Efficient Implementation of The Cordic AlgorithmNaveen JainNo ratings yet
- Optimal Approximation of Analog PID Controllers of Complex Fractional-OrderDocument28 pagesOptimal Approximation of Analog PID Controllers of Complex Fractional-OrderGabriel CelestinoNo ratings yet
- DSP Exam Solutions from University of ManchesterDocument16 pagesDSP Exam Solutions from University of ManchesterEmmanuel Aron JoshuaNo ratings yet
- Wemmu 001Document4 pagesWemmu 001shastryNo ratings yet
- Reducing Front-End Bandwidth May Improve Digital GNSS Receiver PerformanceDocument6 pagesReducing Front-End Bandwidth May Improve Digital GNSS Receiver Performanceyaro82No ratings yet
- Modulation Doping For Iterative Demapping of Bit-Interleaved Coded ModulationDocument3 pagesModulation Doping For Iterative Demapping of Bit-Interleaved Coded ModulationabdulsahibNo ratings yet
- An Evolutionary FIR Filter Design MethodDocument16 pagesAn Evolutionary FIR Filter Design MethodmenguemengueNo ratings yet
- Fourth Problem Assignment: EE603 - DSP and Its ApplicationsDocument5 pagesFourth Problem Assignment: EE603 - DSP and Its Applicationschandan choudharyNo ratings yet
- FMCW Signal ProcessingDocument36 pagesFMCW Signal Processingyjh63601No ratings yet
- Project Paper PDFDocument8 pagesProject Paper PDFGargi SharmaNo ratings yet
- PAPERDocument6 pagesPAPERMADDULURI JAYASRINo ratings yet
- SOLDSPX06Document16 pagesSOLDSPX06Shafayet UddinNo ratings yet
- FPGA Implementation of Adaptive Filter for Impulsive Noise ReductionDocument8 pagesFPGA Implementation of Adaptive Filter for Impulsive Noise ReductionNavathej BangariNo ratings yet
- A Comb Filter Design Using Fractional-Sample DelayDocument5 pagesA Comb Filter Design Using Fractional-Sample DelayTayyab MujahidNo ratings yet
- A Novel Lifting Scheme for Multiresolution Radar Signal CorrelationDocument11 pagesA Novel Lifting Scheme for Multiresolution Radar Signal CorrelationAnil KumarNo ratings yet
- Weighted Partitioning For Fast MultiplierlessDocument5 pagesWeighted Partitioning For Fast MultiplierlessDr. Ruqaiya KhanamNo ratings yet
- IIR Digital Filter Design With New Stability Constraint Based On Argument PrincipleDocument11 pagesIIR Digital Filter Design With New Stability Constraint Based On Argument PrincipleHemant TulsaniNo ratings yet
- Sheng Chen : Digital IIR Filter Design Using Particle Swarm OptimisationDocument9 pagesSheng Chen : Digital IIR Filter Design Using Particle Swarm OptimisationDhanarasiSyamNo ratings yet
- Real-Time Convex Optimization in Signal Processing: Comments To or Are WelcomeDocument11 pagesReal-Time Convex Optimization in Signal Processing: Comments To or Are Welcomebinayaks248No ratings yet
- VHDL Implementation of A Flexible and Synthesizable FFT ProcessorDocument5 pagesVHDL Implementation of A Flexible and Synthesizable FFT ProcessorHarrySchrovskiNo ratings yet
- A New Radix-4 FFT AlgorithmDocument6 pagesA New Radix-4 FFT AlgorithmIAEME PublicationNo ratings yet
- Low-Latency Convolution For Real-Time ApplicationDocument7 pagesLow-Latency Convolution For Real-Time ApplicationotringalNo ratings yet
- 9 HRTHDocument22 pages9 HRTHNithindev GuttikondaNo ratings yet
- Designing FIR Filters by Frequency SamplingDocument4 pagesDesigning FIR Filters by Frequency SamplingApricot BlueberryNo ratings yet
- Design of FIR Digital Filters Using Particle Swarm OptimizationDocument26 pagesDesign of FIR Digital Filters Using Particle Swarm OptimizationShekhar sharmaNo ratings yet
- Research On Analog Bandwidth Enhancement Technology For Digital Storage OscilloscopeDocument4 pagesResearch On Analog Bandwidth Enhancement Technology For Digital Storage OscilloscopeMarioNo ratings yet
- Design and Implementation of Pipelined FFT Processor: D.Venkata Kishore, C.Ram KumarDocument4 pagesDesign and Implementation of Pipelined FFT Processor: D.Venkata Kishore, C.Ram KumarShakeel RanaNo ratings yet
- (IJCST-V9I2P10) :DR - Shine N DasDocument6 pages(IJCST-V9I2P10) :DR - Shine N DasEighthSenseGroupNo ratings yet
- The International Journal of Engineering and Science (The IJES)Document7 pagesThe International Journal of Engineering and Science (The IJES)theijesNo ratings yet
- Performance Analysis of CORDIC Architectures Targeted For FPGA DevicesDocument6 pagesPerformance Analysis of CORDIC Architectures Targeted For FPGA Deviceseditor_ijarcsseNo ratings yet
- Documention TheoryDocument72 pagesDocumention TheorySaNtosh KomakulaNo ratings yet
- Lab # 07 IIR PDFDocument13 pagesLab # 07 IIR PDFIrfan HaiderNo ratings yet
- DSP Am08Document3 pagesDSP Am08Senthil KumarNo ratings yet
- Fast Modular Multiplication Using Parallel Prefix Adder: Pravin P. Zode Raghavendra B. DeshmukhDocument4 pagesFast Modular Multiplication Using Parallel Prefix Adder: Pravin P. Zode Raghavendra B. DeshmukhPrafulani GajbhiyeNo ratings yet
- Al. (2015) ) - These Areas Often Require Real-Time Results With The Efficiency. A 32-BitDocument8 pagesAl. (2015) ) - These Areas Often Require Real-Time Results With The Efficiency. A 32-BittresaNo ratings yet
- Review On Word Length Optimization: Pandi G Sabareeswari, Bhuvaneswari S DR Manivannan SDocument4 pagesReview On Word Length Optimization: Pandi G Sabareeswari, Bhuvaneswari S DR Manivannan Sbhuvana_eeeNo ratings yet
- FIR FILTERS IMPLEMENTATION APPROACHES REPORTDocument14 pagesFIR FILTERS IMPLEMENTATION APPROACHES REPORTH052 Rajesh Komaravalli ECENo ratings yet
- Efficient FPGA Implementation of FFT/IFFT Processor: Ahmed Saeed, M. Elbably, G. Abdelfadeel, and M. I. EladawyDocument8 pagesEfficient FPGA Implementation of FFT/IFFT Processor: Ahmed Saeed, M. Elbably, G. Abdelfadeel, and M. I. Eladawyfadhil78No ratings yet
- An Efficient BER Analysis of OFDM Systems With ICI Conjugate Cancellation MethodDocument6 pagesAn Efficient BER Analysis of OFDM Systems With ICI Conjugate Cancellation Methodnayeem4444No ratings yet
- Integer Optimization and its Computation in Emergency ManagementFrom EverandInteger Optimization and its Computation in Emergency ManagementNo ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
- Using-Dev-CDocument11 pagesUsing-Dev-CigoysinghNo ratings yet
- New Microsoft Office Word DocumentDocument15 pagesNew Microsoft Office Word DocumentPushpendra DwivediNo ratings yet
- Field Marshal Sam Manekshaw On LeadershipDocument9 pagesField Marshal Sam Manekshaw On LeadershipPushpendra Dwivedi100% (1)
- 5 BDocument1 page5 BPushpendra DwivediNo ratings yet
- PricelistDocument5 pagesPricelistDeepak Kumar AryaNo ratings yet
- Practice For Elementary Algebra TestDocument9 pagesPractice For Elementary Algebra TestPushpendra DwivediNo ratings yet
- Nit Recruitment 2013 PDFDocument15 pagesNit Recruitment 2013 PDFSourabh AroraNo ratings yet
- 5 BDocument1 page5 BPushpendra DwivediNo ratings yet
- Programming With WxDec-C++Document155 pagesProgramming With WxDec-C++Pushpendra DwivediNo ratings yet
- 25 BDocument1 page25 BPushpendra DwivediNo ratings yet
- 3 ADocument1 page3 APushpendra DwivediNo ratings yet
- N M) Is Given By: Nu) ) ), 'RALPDocument4 pagesN M) Is Given By: Nu) ) ), 'RALPPushpendra DwivediNo ratings yet
- CompilersDocument191 pagesCompilersNitzan Ofer100% (1)
- 4 BDocument1 page4 BPushpendra DwivediNo ratings yet
- ESE Instructions 2011Document22 pagesESE Instructions 2011Pushpendra DwivediNo ratings yet
- Administrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserDocument7 pagesAdministrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserPushpendra DwivediNo ratings yet
- SC Filter Frequency ResponseDocument15 pagesSC Filter Frequency ResponsePushpendra DwivediNo ratings yet
- 1 BDocument1 page1 BPushpendra DwivediNo ratings yet
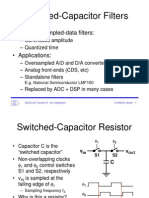
- Switched-Capacitor Filters: - "Analog" Sampled-Data FiltersDocument24 pagesSwitched-Capacitor Filters: - "Analog" Sampled-Data FiltersPushpendra DwivediNo ratings yet
- Higher Order Filter Options: - Cascade of BiquadsDocument14 pagesHigher Order Filter Options: - Cascade of BiquadsPushpendra DwivediNo ratings yet
- Implementation Issues: - Component Spread - Sensitivity - Tuning - Noise - Finite Gain - Finite BandwidthDocument3 pagesImplementation Issues: - Component Spread - Sensitivity - Tuning - Noise - Finite Gain - Finite BandwidthPushpendra DwivediNo ratings yet
- Sampling and Aliasing: - Any Continuous Time Signal Can Be Sampled and Processed in The Sampled-Data DomainDocument8 pagesSampling and Aliasing: - Any Continuous Time Signal Can Be Sampled and Processed in The Sampled-Data DomainPushpendra DwivediNo ratings yet
- Electronic Noise: - Dynamic Range in The Analog DomainDocument22 pagesElectronic Noise: - Dynamic Range in The Analog DomainPushpendra DwivediNo ratings yet
- Analog Filter SynthesisDocument19 pagesAnalog Filter SynthesisPushpendra DwivediNo ratings yet
- Administrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserDocument7 pagesAdministrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserPushpendra DwivediNo ratings yet
- Introduction To Filters: First-Order RC Filter (LPF1)Document13 pagesIntroduction To Filters: First-Order RC Filter (LPF1)Pushpendra DwivediNo ratings yet
- Tow Thomas PDFDocument16 pagesTow Thomas PDFsweety_1No ratings yet
- C18 Accelerating and Deceleerating MethodsDocument59 pagesC18 Accelerating and Deceleerating Methodssathishkumar3eNo ratings yet
- Types of Electrical Holders GuideDocument26 pagesTypes of Electrical Holders GuidePrachiNo ratings yet
- Samsung Plazma TV ps42p5hx D72a P Puccini 42s5 SM (ET)Document126 pagesSamsung Plazma TV ps42p5hx D72a P Puccini 42s5 SM (ET)Marcelo Araujo De Almeida100% (1)
- ZXSDR R8862A Product DescriptionDocument26 pagesZXSDR R8862A Product DescriptionPissu PusaNo ratings yet
- Sop For Image ProcessingDocument5 pagesSop For Image ProcessingLOKESHWARA REDDYNo ratings yet
- Fcb20N60: N-Channel Superfet MosfetDocument9 pagesFcb20N60: N-Channel Superfet MosfetEo GpNo ratings yet
- Hammh 18 IDocument85 pagesHammh 18 IKaiNo ratings yet
- rr310204 Power ElectronicsDocument5 pagesrr310204 Power ElectronicsSRINIVASA RAO GANTANo ratings yet
- DIY Adriano Obstacle Avoiding CarDocument6 pagesDIY Adriano Obstacle Avoiding CarAshwiniNo ratings yet
- Trace Tables: Natalee A. Johnson, ContributorDocument166 pagesTrace Tables: Natalee A. Johnson, ContributorLatoya AndersonNo ratings yet
- ACS800 Sine Filters Revg PDFDocument72 pagesACS800 Sine Filters Revg PDFZinou ZizouNo ratings yet
- Vlsi Design PDFDocument120 pagesVlsi Design PDFHareesh Harsha100% (1)
- SRF Control Strategy based on STFIS Controllers For Single-Stage Four-Leg Transformerless InverterDocument7 pagesSRF Control Strategy based on STFIS Controllers For Single-Stage Four-Leg Transformerless InverterHocine AbdelhakNo ratings yet
- MICROCONTROLLER NOTES Unit 6Document13 pagesMICROCONTROLLER NOTES Unit 6SOMESH B SNo ratings yet
- Chapter 31Document22 pagesChapter 31OmarWaelNo ratings yet
- Method Statement GIS HV TestDocument28 pagesMethod Statement GIS HV Testnayagammailbox75% (4)
- A11 Electric Diagram-3Document7 pagesA11 Electric Diagram-3Ibrahim TamerNo ratings yet
- I. Introduction To Wave Propagation: July, 2003 © 2003 by H.L. Bertoni 1Document71 pagesI. Introduction To Wave Propagation: July, 2003 © 2003 by H.L. Bertoni 1DrShashikant DargarNo ratings yet
- Danfoss Vlt6oo Manual1Document32 pagesDanfoss Vlt6oo Manual1OGNo ratings yet
- Airinterfaces PDFDocument390 pagesAirinterfaces PDFGaurav KukadeNo ratings yet
- SG3125 - 3400HV MV 20 SEN Ver14 201906Document141 pagesSG3125 - 3400HV MV 20 SEN Ver14 201906freeware freeNo ratings yet
- Manual Radar Icom Mr1010riiDocument74 pagesManual Radar Icom Mr1010riiIVANILDONo ratings yet
- Space MouseDocument16 pagesSpace MousePranoy RajNo ratings yet
- 03 Exh I Sos MRP-2495Document7 pages03 Exh I Sos MRP-2495Naba majeadNo ratings yet
- HFX 400 HF Long WireDocument2 pagesHFX 400 HF Long WireShaunVermaakNo ratings yet
- Terminal Venting and ElectrocutionDocument8 pagesTerminal Venting and ElectrocutionCamila LopezNo ratings yet
- 01 - PMC - SignalsDocument58 pages01 - PMC - Signalsregis.nx4100% (1)
- Machinery Protection Devices ChapterDocument50 pagesMachinery Protection Devices Chaptermilanstr100% (2)
- Editable Computer Network ManualDocument168 pagesEditable Computer Network ManualPRABHAKAR MORENo ratings yet
- XTA DC1048 Install Audio Processor Offers Comprehensive EQ and Flexible ControlDocument1 pageXTA DC1048 Install Audio Processor Offers Comprehensive EQ and Flexible ControlRobi SulistionoNo ratings yet