You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Civil Engg. Minor Project On Residential Buildning....Document56 pagesCivil Engg. Minor Project On Residential Buildning....kripa8shankar8pathak50% (2)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- BSNL Tariff PosterDocument1 pageBSNL Tariff PosterGaurav ChaurasiaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- BSNL Tariff PosterDocument1 pageBSNL Tariff PosterGaurav ChaurasiaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Notification Bihar State Power Holding Company LTD AE JE Revenue Officer PostsDocument8 pagesNotification Bihar State Power Holding Company LTD AE JE Revenue Officer PostsPANKAJOISTNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Blood Pressure ControllerDocument19 pagesBlood Pressure ControllerPANKAJOISTNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- 8051 MicrocontrollerDocument11 pages8051 MicrocontrollerPANKAJOISTNo ratings yet
- Current Affairs February 2013 Study Material - FreeJobAlertDocument13 pagesCurrent Affairs February 2013 Study Material - FreeJobAlertPANKAJOISTNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- February 2013 Awards and Honours - FreeJobAlertDocument4 pagesFebruary 2013 Awards and Honours - FreeJobAlertPANKAJOISTNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Differences Between Windows 7 and Windows 8Document3 pagesThe Differences Between Windows 7 and Windows 8PANKAJOISTNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- NTC Thermistors Data SheetDocument11 pagesNTC Thermistors Data SheetEyob AmraNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- AcknowledgementDocument1 pageAcknowledgementPANKAJOISTNo ratings yet
- Automatic Fan Speed ControlDocument11 pagesAutomatic Fan Speed ControlAbhilash Redefining LoveNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- F6929612Obj Electrical Paper II 2009Document23 pagesF6929612Obj Electrical Paper II 2009PANKAJOISTNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- MosfetDocument9 pagesMosfetPANKAJOISTNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- File1-Lecture 09 - Transmission LinesDocument55 pagesFile1-Lecture 09 - Transmission LinesPANKAJOISTNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- TDFC Global Engineering Solutions CompanyDocument189 pagesTDFC Global Engineering Solutions CompanyplanningNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Damper mechanism details for Atlas Copco rock drills under 40 charactersDocument27 pagesDamper mechanism details for Atlas Copco rock drills under 40 characterssalvador341100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- GH G ConversionDocument146 pagesGH G ConversionjorgeNo ratings yet
- A Novel ZVS-ZCS Bi-Directional Flyback DC-DCDocument6 pagesA Novel ZVS-ZCS Bi-Directional Flyback DC-DCArceu CamposNo ratings yet
- Mechanics - Fluid Dynamics: K. Suresh Senanayake 1Document2 pagesMechanics - Fluid Dynamics: K. Suresh Senanayake 1mangsureshNo ratings yet
- Siemens Actuator M3K20FXNDocument10 pagesSiemens Actuator M3K20FXNbasil christopherNo ratings yet
- Installation Instructions: Mico Basic 8.6Document2 pagesInstallation Instructions: Mico Basic 8.6Servizio TecnicoNo ratings yet
- July 8 Pages - Gowrie NewsDocument16 pagesJuly 8 Pages - Gowrie NewsTonya HarrisonNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Dolphin by EnOcean enDocument16 pagesDolphin by EnOcean en刘嘉伟No ratings yet
- QT-002!02!50 HZ Lister Peter - Aksa - Mitsubishi - John Deere - Perkins Engine-Alternator Couple Table 2015.02.16Document1 pageQT-002!02!50 HZ Lister Peter - Aksa - Mitsubishi - John Deere - Perkins Engine-Alternator Couple Table 2015.02.16Cris_eu09No ratings yet
- Test Bank For Achieve For Interactive General Chemistry, 1e by Macmillan Learning Test BankDocument9 pagesTest Bank For Achieve For Interactive General Chemistry, 1e by Macmillan Learning Test BankNail BaskoNo ratings yet
- Automatic Street Light Control Using LDRDocument39 pagesAutomatic Street Light Control Using LDRAyush Kumar100% (1)
- With Refanned Jt8D Engines: CR-1348s Report Mdcj4519Document238 pagesWith Refanned Jt8D Engines: CR-1348s Report Mdcj4519FernandoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- PPTs ON BONTON CABLESDocument10 pagesPPTs ON BONTON CABLESShaishav Anand100% (1)
- CV - Alok Singh - Tech HSE & Loss Prevention Engineer (May-2018)Document5 pagesCV - Alok Singh - Tech HSE & Loss Prevention Engineer (May-2018)toalok4723No ratings yet
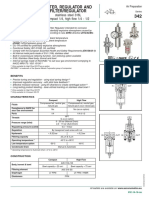
- Numatics Series 342Document6 pagesNumatics Series 342Jebran FarazNo ratings yet
- 001 NemDocument4 pages001 NemNg Han PeiNo ratings yet
- Types of Supports For Vessels - Chemical Engineering WorldDocument10 pagesTypes of Supports For Vessels - Chemical Engineering WorldAdityaNo ratings yet
- Wet Steam Washing SystemDocument7 pagesWet Steam Washing SystemPrudhvi Raj100% (1)
- TERAO Presentation August 2022Document48 pagesTERAO Presentation August 2022LuatNguyenNo ratings yet
- Metalux Hbled Standard Efficiency Specsheet - Hbled ld5 24se W Unv l850 Ed2 UDocument5 pagesMetalux Hbled Standard Efficiency Specsheet - Hbled ld5 24se W Unv l850 Ed2 UDANIEL SALAZARNo ratings yet
- SUPER PPTPPTDocument15 pagesSUPER PPTPPTsrinuNo ratings yet
- EMT2-hw4 - SolDocument6 pagesEMT2-hw4 - SolSuper SpecialNo ratings yet
- IPM 200 Series: Internal Permanent Magnet MotorsDocument7 pagesIPM 200 Series: Internal Permanent Magnet MotorsLuu JosNo ratings yet
- Sungris BrochureDocument8 pagesSungris Brochurechemasi123No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Rectification ProcessDocument5 pagesRectification ProcessDilnaz TegispayNo ratings yet
- 50 Straw Bale House PlansDocument9 pages50 Straw Bale House Plansdarius-matuiza-81990% (1)
- Mechatronics Handbook - 02 - Mechatronic Design Approach PDFDocument16 pagesMechatronics Handbook - 02 - Mechatronic Design Approach PDFJosé Fernando TerronesNo ratings yet
- P6112 Alstom PG9171E PowerPlant SpecificationsDocument1 pageP6112 Alstom PG9171E PowerPlant SpecificationsSunario YapNo ratings yet
- Chlorosorb Ultra Case StudiesDocument5 pagesChlorosorb Ultra Case StudiesWitta Kartika RestuNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)