You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- High Voltage Engineering Kamaraju and NaiduDocument2 pagesHigh Voltage Engineering Kamaraju and NaiduAnbalagan GuruNo ratings yet
- Nov Dec Results College Comp 3rd SemDocument2 pagesNov Dec Results College Comp 3rd SemAnbalagan GuruNo ratings yet
- Electrical Quiz11Document1 pageElectrical Quiz11Anbalagan GuruNo ratings yet
- Basic Electronics Test Study GuideDocument26 pagesBasic Electronics Test Study GuideClark CabansagNo ratings yet
- 4thsem All Test MarksDocument6 pages4thsem All Test MarksAnbalagan GuruNo ratings yet
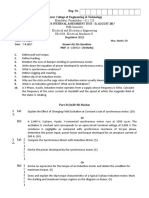
- Roever Engineering College Roever College of Engineering &technologyDocument5 pagesRoever Engineering College Roever College of Engineering &technologyAnbalagan GuruNo ratings yet
- CA Nov 2012 Downloaded FromDocument28 pagesCA Nov 2012 Downloaded FromRohit SinglaNo ratings yet
- Battery Sizing CalculatorDocument6 pagesBattery Sizing Calculatormfisol2000No ratings yet
- Cable Design - New (22.8.12)Document93 pagesCable Design - New (22.8.12)zanibabNo ratings yet
- Pump SizingDocument4 pagesPump SizingNikunj100% (5)
- Em-Ii Cia-2Document2 pagesEm-Ii Cia-2Anbalagan GuruNo ratings yet
- Ee6008 Microcontroller Based System Designl Question BankDocument4 pagesEe6008 Microcontroller Based System Designl Question BankAnbalagan GuruNo ratings yet
- MOdrobs - Mech 2017Document6 pagesMOdrobs - Mech 2017Anbalagan GuruNo ratings yet
- Strategic Plan 2010-2012: Thanthai Roever Institute of Polytechnic CollegeDocument50 pagesStrategic Plan 2010-2012: Thanthai Roever Institute of Polytechnic CollegeAnbalagan GuruNo ratings yet
- RCET Name ListDocument11 pagesRCET Name ListAnbalagan GuruNo ratings yet
- Exp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkDocument5 pagesExp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkAnbalagan GuruNo ratings yet
- Name ListDocument3 pagesName ListAnbalagan GuruNo ratings yet
- Starting of DC MotorDocument3 pagesStarting of DC MotorAnbalagan GuruNo ratings yet
- GA EM2 Lesson PlanDocument6 pagesGA EM2 Lesson PlanAnbalagan GuruNo ratings yet
- All Year Eee Name List 16 17Document2 pagesAll Year Eee Name List 16 17Anbalagan GuruNo ratings yet
- Rcet EeeDocument1 pageRcet EeeAnbalagan GuruNo ratings yet
- Data Structure and Algorithm AnalysisDocument57 pagesData Structure and Algorithm AnalysisAnbalagan GuruNo ratings yet
- TRB Engg. Prospucts 2016Document24 pagesTRB Engg. Prospucts 2016kssudhagarNo ratings yet
- Academic Year 2016-17 Odd Semester, 4 Year Eee: Ee6008 Microcontroller Based System Design, Subject inDocument2 pagesAcademic Year 2016-17 Odd Semester, 4 Year Eee: Ee6008 Microcontroller Based System Design, Subject inAnbalagan GuruNo ratings yet
- IET Club Activities at Roever CollegeDocument15 pagesIET Club Activities at Roever CollegeAnbalagan GuruNo ratings yet
- Ee6504 Electrical MachinesDocument2 pagesEe6504 Electrical MachinesAnbalagan GuruNo ratings yet
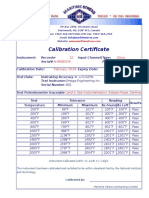
- Calibration Certificate SampleDocument1 pageCalibration Certificate SampleAnbalagan Guru100% (2)
- Unit IV Introduction To Arm ProcessorDocument2 pagesUnit IV Introduction To Arm ProcessorAnbalagan GuruNo ratings yet
- Unit III Peripherals and InterfacingDocument1 pageUnit III Peripherals and InterfacingAnbalagan GuruNo ratings yet
- Unit V Arm OrganizationDocument1 pageUnit V Arm OrganizationAnbalagan GuruNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Front Panel & Display Technical Data: User ManualDocument2 pagesFront Panel & Display Technical Data: User ManualJulio PorleyNo ratings yet
- Logic CHPT71Document27 pagesLogic CHPT71Eronjosh FontanozaNo ratings yet
- Unit-I-2-Marks-With-Ans3 Hydrology1 - BY Civildatas - Blogspot.in PDFDocument4 pagesUnit-I-2-Marks-With-Ans3 Hydrology1 - BY Civildatas - Blogspot.in PDFHimanshu sharmaNo ratings yet
- 08 Candelaria Punta Del Cobre IOCG Deposits PDFDocument27 pages08 Candelaria Punta Del Cobre IOCG Deposits PDFDiego Morales DíazNo ratings yet
- PM Master Data Template v1Document72 pagesPM Master Data Template v1Naseer SultanNo ratings yet
- UG WeibullDocument776 pagesUG WeibullCharles GuzmanNo ratings yet
- Transportation Planning ProcessDocument43 pagesTransportation Planning ProcessAncheta Suzanne ClarisseNo ratings yet
- OracleDocument23 pagesOracleriza arifNo ratings yet
- Create an access point for non-RouterOS laptop clientsDocument8 pagesCreate an access point for non-RouterOS laptop clientsGorgeus WaffleNo ratings yet
- A Design and Analysis of A Morphing Hyper-Elliptic Cambered Span (HECS) WingDocument10 pagesA Design and Analysis of A Morphing Hyper-Elliptic Cambered Span (HECS) WingJEORJENo ratings yet
- PVC PLasticisersDocument2 pagesPVC PLasticisersKrishna PrasadNo ratings yet
- Probability Statistics and Random Processes Third Edition T Veerarajan PDFDocument3 pagesProbability Statistics and Random Processes Third Edition T Veerarajan PDFbhavyamNo ratings yet
- Huawei Mediapad m5 10.8inch Ръководство За Потребителя (Cmr-Al09, 01, Neu)Document6 pagesHuawei Mediapad m5 10.8inch Ръководство За Потребителя (Cmr-Al09, 01, Neu)Галина ЦеноваNo ratings yet
- CI SetDocument18 pagesCI Setতন্ময় ঢালি Tanmay DhaliNo ratings yet
- Spesifikasi ACER Travelmate P2-P245Document12 pagesSpesifikasi ACER Travelmate P2-P245Sebastian Fykri AlmuktiNo ratings yet
- Sec 2 French ImmersionDocument1 pageSec 2 French Immersionapi-506328259No ratings yet
- Methods For Assessing The Stability of Slopes During Earthquakes-A Retrospective 1Document3 pagesMethods For Assessing The Stability of Slopes During Earthquakes-A Retrospective 1ilijarskNo ratings yet
- Lecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanDocument18 pagesLecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanLaura AmwayiNo ratings yet
- WebControls - TabStripDocument38 pagesWebControls - TabStripProkopis PrNo ratings yet
- Velocity profiles and incompressible flow field equationsDocument2 pagesVelocity profiles and incompressible flow field equationsAbdul ArifNo ratings yet
- MITRES 6 002S08 Chapter2Document87 pagesMITRES 6 002S08 Chapter2shalvinNo ratings yet
- Solutions To Irodov's Problems - Volume IIDocument442 pagesSolutions To Irodov's Problems - Volume IIZequinha de Abreu100% (2)
- Public Key Cryptography: S. Erfani, ECE Dept., University of Windsor 0688-558-01 Network SecurityDocument7 pagesPublic Key Cryptography: S. Erfani, ECE Dept., University of Windsor 0688-558-01 Network SecurityAbrasaxEimi370No ratings yet
- Records of Intervention On The Findings of Test Results and Other Forms of AssessmentDocument10 pagesRecords of Intervention On The Findings of Test Results and Other Forms of AssessmentLea May MagnoNo ratings yet
- Excel 2007 Lesson 7 QuizDocument5 pagesExcel 2007 Lesson 7 Quizdeep72No ratings yet
- THKDocument1,901 pagesTHKapi-26356646No ratings yet
- Unit-3 BioinformaticsDocument15 pagesUnit-3 Bioinformaticsp vmuraliNo ratings yet
- Jaguar Land Rover Configuration Lifecycle Management WebDocument4 pagesJaguar Land Rover Configuration Lifecycle Management WebStar Nair Rock0% (1)
- Mitsubishi diesel forklifts 1.5-3.5 tonnesDocument2 pagesMitsubishi diesel forklifts 1.5-3.5 tonnesJoniNo ratings yet
- PDS - GulfSea Hydraulic AW Series-1Document2 pagesPDS - GulfSea Hydraulic AW Series-1Zaini YaakubNo ratings yet