You might also like
- EV Class NotesDocument30 pagesEV Class NotesVinod BabaleshwarNo ratings yet
- Calculation of Torque For Selection of MotorDocument6 pagesCalculation of Torque For Selection of Motoratanughosh125100% (6)
- Synchro Appl GuideDocument5 pagesSynchro Appl GuideAlexandre Anderson AlvesNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- Mathematical Modelling of Electromechanical Systems PPT PSDDocument8 pagesMathematical Modelling of Electromechanical Systems PPT PSDNoviaNo ratings yet
- DTrends Feb 2011Document14 pagesDTrends Feb 2011Rui AllenNo ratings yet
- Ac DrivesDocument36 pagesAc DrivesSeshagirirao GalamNo ratings yet
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDocument13 pagesThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimNo ratings yet
- Caculate Rotary LinearDocument3 pagesCaculate Rotary LinearTrinh Luong MienNo ratings yet
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocument39 pagesAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliNo ratings yet
- Dynamometers 161011144109Document28 pagesDynamometers 161011144109Mr.S UpenderNo ratings yet
- Motor Selection, Inertia PDFDocument6 pagesMotor Selection, Inertia PDFIswar Rauf Aboo 'AqilahNo ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- Torque MeasurementDocument43 pagesTorque Measurementvadithya1515No ratings yet
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocument15 pagesInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminNo ratings yet
- A Design of The DC Motor Control CircuitDocument9 pagesA Design of The DC Motor Control Circuitnyskyscraper051127No ratings yet
- Finalpaper 135Document6 pagesFinalpaper 135vinaynitw257No ratings yet
- Solid State Drives Short BookDocument25 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- User's Manual: D.C. Motor StudyDocument25 pagesUser's Manual: D.C. Motor Studymanoj_varma_1No ratings yet
- Web Motor GlossaryDocument7 pagesWeb Motor GlossaryansabhiNo ratings yet
- Induction Motor Speed ControlDocument46 pagesInduction Motor Speed Controlsolo400060% (10)
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- Torque Sensor: 3.1 Measurement MethodsDocument12 pagesTorque Sensor: 3.1 Measurement MethodsEric KerrNo ratings yet
- Aim: Apparatus Required: Theory:: Torque TransducerDocument4 pagesAim: Apparatus Required: Theory:: Torque TransducerArjyajyoti GoswamiNo ratings yet
- Expt 7 Shock Absorber Test RigDocument5 pagesExpt 7 Shock Absorber Test RigRithwik pawarNo ratings yet
- Measure CHDocument60 pagesMeasure CHIshu KumarNo ratings yet
- Aim: Apparatus Required: Theory:: Torque TransducerDocument4 pagesAim: Apparatus Required: Theory:: Torque TransducerNishant JainNo ratings yet
- Control System ComponentsDocument29 pagesControl System Componentsshreemanti0% (1)
- Slip Torque Characteristics of Induction MotorDocument22 pagesSlip Torque Characteristics of Induction MotorSree ShobhaNo ratings yet
- Med - 2013-05-12 - Vibration Measurement and ApplicationsDocument27 pagesMed - 2013-05-12 - Vibration Measurement and ApplicationsArslan AdeelNo ratings yet
- Induction Motor Drive Control MethodsDocument8 pagesInduction Motor Drive Control MethodsRudra Kumar MishraNo ratings yet
- Final Control ElementsDocument76 pagesFinal Control ElementsUtkarsh ModiNo ratings yet
- Intelligent Braking System Literature ReviewDocument39 pagesIntelligent Braking System Literature ReviewRaj WagdariNo ratings yet
- RBT Lab Manuval 11E608 CEDocument106 pagesRBT Lab Manuval 11E608 CEnandhakumarmeNo ratings yet
- مصدر التقرير الاحتراقDocument45 pagesمصدر التقرير الاحتراقياسر سعد حسونNo ratings yet
- Guide: Mr. M. Srinivasa Rao Asso. ProffesorDocument49 pagesGuide: Mr. M. Srinivasa Rao Asso. ProffesorSaurabh MishraNo ratings yet
- Synchro Application Guide: TransmitterDocument9 pagesSynchro Application Guide: TransmitterLeviatan McblueNo ratings yet
- An Serv 002 PDFDocument20 pagesAn Serv 002 PDFMario TapiaNo ratings yet
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocument25 pagesAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958No ratings yet
- 3.2 Sensors and TransducersDocument38 pages3.2 Sensors and Transducersjohanna shaanyenengeNo ratings yet
- Torque 1Document13 pagesTorque 1Raghvendra TiwariNo ratings yet
- Oos and TorsionDocument14 pagesOos and TorsionlisusedNo ratings yet
- Vibration EngineeringDocument37 pagesVibration EngineeringAlen Benguit II0% (1)
- 4 DynamometerDocument8 pages4 DynamometerParesh PatilNo ratings yet
- Torsion: Shear Stress & Twist (3.1-3.5Document27 pagesTorsion: Shear Stress & Twist (3.1-3.5Anonymous RGLhewESFNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- SANKAR POLYTECHNIC COLLEGE (AUTONOMOUS) SANKAR NAGAR DIPLOMA IN ELECTRICAL AND ELECTRONICS ENGINEERINGDocument45 pagesSANKAR POLYTECHNIC COLLEGE (AUTONOMOUS) SANKAR NAGAR DIPLOMA IN ELECTRICAL AND ELECTRONICS ENGINEERINGDilipkumarSureshNo ratings yet
- InductionMotors Gate Material PartBDocument38 pagesInductionMotors Gate Material PartBpraveen6494No ratings yet
- Induction MachineDocument48 pagesInduction MachinechethanNo ratings yet
- Torque Measurement (Torsion Meters)Document6 pagesTorque Measurement (Torsion Meters)Raghvendra Singh ShaktawatNo ratings yet
- Measuring Engine Power with a DynamometerDocument14 pagesMeasuring Engine Power with a Dynamometerpradip payghanNo ratings yet
- Servo Motor SelectionDocument11 pagesServo Motor Selectionanandparasu100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- ReadmeDocument4 pagesReadmevishiwizardNo ratings yet
- Part Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisDocument6 pagesPart Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisIjabiNo ratings yet
- Hardware Inloop Simulation IEEE LabVIEWDocument1 pageHardware Inloop Simulation IEEE LabVIEWvishiwizardNo ratings yet
- ACM2 TAU Datasheet enDocument5 pagesACM2 TAU Datasheet envishiwizardNo ratings yet
- 50 SCS Automotive Coatings - Rev0913Document4 pages50 SCS Automotive Coatings - Rev0913vishiwizardNo ratings yet
- 5 SmanualDocument16 pages5 SmanualMark ThomasNo ratings yet
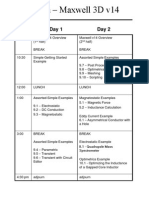
- Maxwell 3D v14 Training AgendaDocument1 pageMaxwell 3D v14 Training AgendavishiwizardNo ratings yet
- Electric Vehicle Motor Design NotesDocument131 pagesElectric Vehicle Motor Design NotesvishiwizardNo ratings yet
- LJLVJK LVJJV LKJVDocument5 pagesLJLVJK LVJJV LKJVvishiwizardNo ratings yet
- FAB Resistivity White PaperDocument8 pagesFAB Resistivity White PapervishiwizardNo ratings yet
- Engineered PlasticsDocument61 pagesEngineered Plastics고병석No ratings yet
- TRL Definitions PDFDocument1 pageTRL Definitions PDFBHARadwajNo ratings yet
- Recent Advances in Materials For Use in Permanent Magnet Machines - A ReviewDocument7 pagesRecent Advances in Materials For Use in Permanent Magnet Machines - A ReviewvishiwizardNo ratings yet
- Jeas 1012 787Document5 pagesJeas 1012 787vishiwizardNo ratings yet
- Op - XT546 246 346 - Op288 V03Document2 pagesOp - XT546 246 346 - Op288 V03vishiwizardNo ratings yet
- Nit 3600 1Document5 pagesNit 3600 1vishiwizardNo ratings yet
- Maxwell 2dDocument7 pagesMaxwell 2dvishiwizardNo ratings yet
- How to Check a MOSFETDocument2 pagesHow to Check a MOSFETvishiwizardNo ratings yet
- Big Energy Series 11.5.2012 Qing-Chang ZhongDocument1 pageBig Energy Series 11.5.2012 Qing-Chang ZhongvishiwizardNo ratings yet
- Electrical Resin BenefitsDocument2 pagesElectrical Resin BenefitsvishiwizardNo ratings yet
- Brushless Motor FundamentalsDocument13 pagesBrushless Motor FundamentalsvishiwizardNo ratings yet
- Presentation 1Document1 pagePresentation 1vishiwizardNo ratings yet
- Sensors Used in HEVDocument4 pagesSensors Used in HEVvishiwizard100% (1)
- Wittich2011 SonkusaleVanderveldeDocument1 pageWittich2011 SonkusaleVanderveldevishiwizardNo ratings yet
- FTF Aut f0234Document38 pagesFTF Aut f0234vishiwizardNo ratings yet
- Cam DesignDocument13 pagesCam DesignvishiwizardNo ratings yet
- Lit Survey RamamurthyDocument9 pagesLit Survey RamamurthyvishiwizardNo ratings yet
- Motor Primer1Document2 pagesMotor Primer1vishiwizardNo ratings yet
- Sona SPEED CatalogueDocument13 pagesSona SPEED CataloguevishiwizardNo ratings yet
- A Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesDocument1 pageA Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesvishiwizardNo ratings yet
- B-144 - Datasheet - PSVDocument6 pagesB-144 - Datasheet - PSVRameez AhmedNo ratings yet
- AQA A Level Physics Equation SheetDocument5 pagesAQA A Level Physics Equation SheetCamila Lorenzoni100% (2)
- Assignment in Advance WeldingDocument10 pagesAssignment in Advance WeldingShabbir WahabNo ratings yet
- Qip Ice 31 Stirling EnginesDocument20 pagesQip Ice 31 Stirling EnginesChetanPrajapatiNo ratings yet
- Shear Strength of Precast Prestressed Concrete Hollow Core SlabsDocument4 pagesShear Strength of Precast Prestressed Concrete Hollow Core SlabsMarkoGlamuzinaNo ratings yet
- Casting Forming Welding Thermal CyclesDocument25 pagesCasting Forming Welding Thermal CyclesJordArt GRNo ratings yet
- Diffusion in Ducts and DiffusersDocument9 pagesDiffusion in Ducts and DiffusersDr.S.RamamurthyNo ratings yet
- Project With MTHDLG 2-1Document14 pagesProject With MTHDLG 2-1Rohit chikkodiNo ratings yet
- Cambridge International General Certificate of Secondary EducationDocument20 pagesCambridge International General Certificate of Secondary Educationyuke kristinaNo ratings yet
- Tech Pub 248D Welding Performance Qualification PDFDocument242 pagesTech Pub 248D Welding Performance Qualification PDFCory100% (2)
- ANSI Z97.1 SummaryDocument4 pagesANSI Z97.1 SummaryAli YalazNo ratings yet
- Putro 2017Document93 pagesPutro 2017Yon tinyayaNo ratings yet
- Catalysis Science & Technology: Accepted ManuscriptDocument11 pagesCatalysis Science & Technology: Accepted Manuscriptumesh2329No ratings yet
- FailureNotes PDFDocument8 pagesFailureNotes PDFsameshni pillayNo ratings yet
- CFD ANALYSIS OF NACA 0012 AIRFOILDocument77 pagesCFD ANALYSIS OF NACA 0012 AIRFOILHassan Ayub KhanNo ratings yet
- Jorg B. Gotte Et Al - Light Beams With Fractional Orbital Angular Momentum and Their Vortex StructureDocument14 pagesJorg B. Gotte Et Al - Light Beams With Fractional Orbital Angular Momentum and Their Vortex StructureVing666789No ratings yet
- Heatwave Climate Change IntDocument5 pagesHeatwave Climate Change IntPulkit VasudhaNo ratings yet
- Wps For Smaw06-001 (Pipe 6g CS)Document10 pagesWps For Smaw06-001 (Pipe 6g CS)walitedisonNo ratings yet
- Finding force and acceleration using Newton's lawsDocument6 pagesFinding force and acceleration using Newton's laws黃錞彥No ratings yet
- Degradation Effects On Industrial Gas Turbines by Kurz and Burn and Wollie (2009)Document7 pagesDegradation Effects On Industrial Gas Turbines by Kurz and Burn and Wollie (2009)wolf_nsNo ratings yet
- Intro CsamtDocument4 pagesIntro CsamtJoshLeighNo ratings yet
- GWH Module 1 NotesDocument6 pagesGWH Module 1 NotesSahil AmeerNo ratings yet
- Lawend Kamal Askar - Assignment 1Document7 pagesLawend Kamal Askar - Assignment 1Lawend KoramarkiNo ratings yet
- Part 4 - Soft GroundDocument64 pagesPart 4 - Soft GroundsquakeNo ratings yet
- Transpallet Elevator Spare Parts CatalogDocument15 pagesTranspallet Elevator Spare Parts CatalogLuca FroliNo ratings yet
- Mole ConceptDocument26 pagesMole Conceptzefrus kunNo ratings yet
- Type 6010, 6011, and Whisper Disk Inline Diffusers: Bulletin 80.1:6010Document6 pagesType 6010, 6011, and Whisper Disk Inline Diffusers: Bulletin 80.1:6010Datt NguyenNo ratings yet
- DistributionatalogueDocument38 pagesDistributionatalogued22027lingmail.comNo ratings yet
- Durham E-Theses: Novel Block Co-Polymers As Potential Photonic MaterialsDocument118 pagesDurham E-Theses: Novel Block Co-Polymers As Potential Photonic MaterialsWassini BensNo ratings yet
- Lecture 7 Inclusions and Pinhole Formation in DIDocument33 pagesLecture 7 Inclusions and Pinhole Formation in DILuis Arturo RamirezNo ratings yet