You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Cómo hacer un comunicador Bluetooth de Star TrekDocument40 pagesCómo hacer un comunicador Bluetooth de Star TrekeeindustrialNo ratings yet
- Digital Level For IcsDocument1 pageDigital Level For IcseeindustrialNo ratings yet
- 2Document40 pages2pekmesNo ratings yet
- MICRO Servo Motor Control using PIC16F877ADocument12 pagesMICRO Servo Motor Control using PIC16F877Aeeindustrial100% (1)
- Study of Hybrid Parameters of A TransistorDocument1 pageStudy of Hybrid Parameters of A TransistorPriyanka AlisonNo ratings yet
- HT12DDocument11 pagesHT12DeeindustrialNo ratings yet
- Laboratory Power Supply 24V 4ADocument20 pagesLaboratory Power Supply 24V 4AeeindustrialNo ratings yet
- Cómo hacer un comunicador Bluetooth de Star TrekDocument40 pagesCómo hacer un comunicador Bluetooth de Star TrekeeindustrialNo ratings yet
- Basic Lamp DimmerDocument3 pagesBasic Lamp DimmereeindustrialNo ratings yet
- SN5474LS95B 4-Bit Shift RegisterDocument6 pagesSN5474LS95B 4-Bit Shift RegisterhayssamNo ratings yet
- Threshold Switch Circuit raises voltage for relay coilDocument1 pageThreshold Switch Circuit raises voltage for relay coileeindustrialNo ratings yet
- 100 Ic CircuitsDocument42 pages100 Ic CircuitseeindustrialNo ratings yet
- Get Your PCBDocument17 pagesGet Your PCBeeindustrialNo ratings yet
- Proteus Design Suite Product GuideDocument12 pagesProteus Design Suite Product GuideSherif EltoukhiNo ratings yet
- 74166Document16 pages74166eeindustrialNo ratings yet
- 74194Document12 pages74194eeindustrialNo ratings yet
- EMSOFT 2009 Mindstorms TutorialDocument89 pagesEMSOFT 2009 Mindstorms TutorialeeindustrialNo ratings yet
- LM3914Document19 pagesLM3914Brzata PticaNo ratings yet
- How Priscilla Handles School BulliesDocument6 pagesHow Priscilla Handles School BullieseeindustrialNo ratings yet
- A Meeting of The MindstormsDocument5 pagesA Meeting of The MindstormseeindustrialNo ratings yet
- Combinational Logic CircuitsDocument30 pagesCombinational Logic CircuitseeindustrialNo ratings yet
- States of The MatterDocument1 pageStates of The MattereeindustrialNo ratings yet
- LM3914Document19 pagesLM3914Brzata PticaNo ratings yet
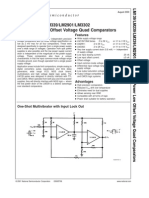
- LM339Document19 pagesLM339api-3825669No ratings yet
- LM107Document11 pagesLM107eeindustrialNo ratings yet
- En CD00003794 PDFDocument6 pagesEn CD00003794 PDFOpena JcNo ratings yet
- NTE6402 Programmable Unijunction Transistor (PUT) : DescriptionDocument2 pagesNTE6402 Programmable Unijunction Transistor (PUT) : DescriptioneeindustrialNo ratings yet
- Nte 6407Document2 pagesNte 6407eeindustrialNo ratings yet
- 2 N 2646Document2 pages2 N 2646Alexz PeregrinaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tabelas Normativas DinDocument2 pagesTabelas Normativas DinDeimos PhobosNo ratings yet
- Consistency ModelsDocument42 pagesConsistency ModelsPixel DinosaurNo ratings yet
- Shaft design exercisesDocument8 pagesShaft design exercisesIvanRosellAgustíNo ratings yet
- Receiving Welcoming and Greeting of GuestDocument18 pagesReceiving Welcoming and Greeting of GuestMarwa KorkabNo ratings yet
- Propaganda and Counterpropaganda in Film, 1933-1945: Retrospective of The 1972 ViennaleDocument16 pagesPropaganda and Counterpropaganda in Film, 1933-1945: Retrospective of The 1972 ViennaleDanWDurningNo ratings yet
- Topic 4 Petrophysics - Part 4Document32 pagesTopic 4 Petrophysics - Part 4Aneesch PreethaNo ratings yet
- NIT JRF OpportunityDocument4 pagesNIT JRF Opportunitybalaguru78No ratings yet
- Discourse Community 2Document7 pagesDiscourse Community 2api-272763663No ratings yet
- Saline Water Intrusion in Coastal Aquifers: A Case Study From BangladeshDocument6 pagesSaline Water Intrusion in Coastal Aquifers: A Case Study From BangladeshIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Platon Si Academia Veche de ZellerDocument680 pagesPlaton Si Academia Veche de ZellerDan BrizaNo ratings yet
- Imports System - data.SqlClient Imports System - Data Imports System PartialDocument2 pagesImports System - data.SqlClient Imports System - Data Imports System PartialStuart_Lonnon_1068No ratings yet
- Assignment2-9509Document5 pagesAssignment2-9509ritadhikarycseNo ratings yet
- HTTP - WWW - Aphref.aph - Gov.au - House - Committee - Pjcis - nsl2012 - Additional - Discussion Paper PDFDocument61 pagesHTTP - WWW - Aphref.aph - Gov.au - House - Committee - Pjcis - nsl2012 - Additional - Discussion Paper PDFZainul Fikri ZulfikarNo ratings yet
- I&C Engineer or Automation EngineerDocument3 pagesI&C Engineer or Automation Engineerapi-79304330No ratings yet
- Capitalism Communism Socialism DebateDocument28 pagesCapitalism Communism Socialism DebateMr. Graham Long100% (1)
- EdiTasc EDocument89 pagesEdiTasc EOglasnik MostarNo ratings yet
- Gpredict User Manual 1.2Document64 pagesGpredict User Manual 1.2Will JacksonNo ratings yet
- English Class Language DevicesDocument56 pagesEnglish Class Language DevicesKAREN GREGANDANo ratings yet
- RAGHAV Sound DesignDocument16 pagesRAGHAV Sound DesignRaghav ChaudhariNo ratings yet
- Physical Properties of Sea WaterDocument45 pagesPhysical Properties of Sea WaterjisuNo ratings yet
- Mitchell 1986Document34 pagesMitchell 1986Sara Veronica Florentin CuencaNo ratings yet
- A Comparative Marketing Study of LG ElectronicsDocument131 pagesA Comparative Marketing Study of LG ElectronicsAshish JhaNo ratings yet
- Livros Vet LinksDocument12 pagesLivros Vet LinksÉrica RebeloNo ratings yet
- Print Application FormDocument4 pagesPrint Application Formarjun guptaNo ratings yet
- RBI and Maintenance For RCC Structure SeminarDocument4 pagesRBI and Maintenance For RCC Structure SeminarcoxshulerNo ratings yet
- Unit 2 Technological Change Population and Growth 1.0Document33 pagesUnit 2 Technological Change Population and Growth 1.0knowme73No ratings yet
- Growing Up Psychic by Chip Coffey - ExcerptDocument48 pagesGrowing Up Psychic by Chip Coffey - ExcerptCrown Publishing Group100% (1)
- Assignment 1 - Tiered LessonDocument15 pagesAssignment 1 - Tiered Lessonapi-320736246No ratings yet
- Omega Fluid PDFDocument2 pagesOmega Fluid PDFapatzinfedNo ratings yet
- Appointment Letter JobDocument30 pagesAppointment Letter JobsalmanNo ratings yet