You might also like
- CV for Akshay Kumar SharmaDocument1 pageCV for Akshay Kumar SharmaYogesh RathiNo ratings yet
- Earth Is The Third Planet From The SunDocument2 pagesEarth Is The Third Planet From The SunYogesh RathiNo ratings yet
- 3-Di#Ffiw - Ffit'-'Ce: HH STJ A Verm-Q ', R'E'"V # #Y HJDocument2 pages3-Di#Ffiw - Ffit'-'Ce: HH STJ A Verm-Q ', R'E'"V # #Y HJYogesh RathiNo ratings yet
- 1.0 Solar EnergyDocument34 pages1.0 Solar EnergyYogesh RathiNo ratings yet
- Actual ReportDocument73 pagesActual ReportYogesh RathiNo ratings yet
- Main FileDocument40 pagesMain FileYogesh RathiNo ratings yet
- OxaDocument7 pagesOxaYogesh RathiNo ratings yet
- Cell Jammer ReportDocument53 pagesCell Jammer ReportYogesh RathiNo ratings yet
- Electronic Nose (E-Nose) Using Micro Electro Mechanical Systems (MEMS)Document34 pagesElectronic Nose (E-Nose) Using Micro Electro Mechanical Systems (MEMS)Yogesh RathiNo ratings yet
- Synthesis of Novel Oxazoles and Their Hydrazones: Vijay V Dabholkar and Sagir Ahmed Sabir Ali SyedDocument5 pagesSynthesis of Novel Oxazoles and Their Hydrazones: Vijay V Dabholkar and Sagir Ahmed Sabir Ali SyedYogesh RathiNo ratings yet
- Kamal 3pageDocument2 pagesKamal 3pageYogesh RathiNo ratings yet
- Imidazole and Benzimidazole Synthesis M Ross Grimmett 1997Document18 pagesImidazole and Benzimidazole Synthesis M Ross Grimmett 1997alphahisarNo ratings yet
- Solar Cooker Project ReportDocument5 pagesSolar Cooker Project ReportYogesh RathiNo ratings yet
- Parts DetailDocument26 pagesParts DetailYogesh RathiNo ratings yet
- Synthesis of Novel Oxazoles and Their Hydrazones: Vijay V Dabholkar and Sagir Ahmed Sabir Ali SyedDocument5 pagesSynthesis of Novel Oxazoles and Their Hydrazones: Vijay V Dabholkar and Sagir Ahmed Sabir Ali SyedYogesh RathiNo ratings yet
- Ogle ThesisDocument37 pagesOgle ThesisYogesh RathiNo ratings yet
- Imidazole and Benzimidazole Synthesis M Ross Grimmett 1997Document18 pagesImidazole and Benzimidazole Synthesis M Ross Grimmett 1997alphahisarNo ratings yet
- Department of Mechanical Engineering Shri Gokul Verma Govt. Polotechnic College Bharatpur (Raj)Document1 pageDepartment of Mechanical Engineering Shri Gokul Verma Govt. Polotechnic College Bharatpur (Raj)Yogesh RathiNo ratings yet
- Riddhi Siddhi Services: EarningsDocument1 pageRiddhi Siddhi Services: EarningsYogesh RathiNo ratings yet
- WDDocument2 pagesWDYogesh RathiNo ratings yet
- Department of Mechanical Engineering Shri Gokul Verma Govt. Polotechnic College Bharatpur (Raj)Document1 pageDepartment of Mechanical Engineering Shri Gokul Verma Govt. Polotechnic College Bharatpur (Raj)Yogesh RathiNo ratings yet
- SBI FinanceDocument76 pagesSBI FinanceYogesh RathiNo ratings yet
- ReportDocument29 pagesReportYogesh RathiNo ratings yet
- MBA Student Completes Summer Training on Working CapitalDocument1 pageMBA Student Completes Summer Training on Working CapitalYogesh RathiNo ratings yet
- Diesel Fuel FiltersDocument10 pagesDiesel Fuel FiltersYogesh RathiNo ratings yet
- Alwar Management Studies,: TitledDocument82 pagesAlwar Management Studies,: TitledPushpendra KumarNo ratings yet
- Diesel Fuel FiltersDocument10 pagesDiesel Fuel FiltersYogesh RathiNo ratings yet
- History of Insurance in IndiaDocument71 pagesHistory of Insurance in IndiaYogesh RathiNo ratings yet
- Alwar Management Studies,: TitledDocument82 pagesAlwar Management Studies,: TitledPushpendra KumarNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Study On Consumer's Perception Towards Honda Activa in Lucknow CityDocument37 pagesA Study On Consumer's Perception Towards Honda Activa in Lucknow CityChandan SrivastavaNo ratings yet
- Automatic Transmission Oil Temperature Sensor DTC P0711, P0712, P0713 Technical Service BulletinDocument10 pagesAutomatic Transmission Oil Temperature Sensor DTC P0711, P0712, P0713 Technical Service BulletinPerminov SergeyNo ratings yet
- Tandem Cold MillsDocument56 pagesTandem Cold MillsdownloadNo ratings yet
- SAAB 900 1993 (Opt)Document38 pagesSAAB 900 1993 (Opt)mnbvqwertNo ratings yet
- Mechanical Engineering Project IdeaDocument25 pagesMechanical Engineering Project Ideakebed ajamoNo ratings yet
- Belt Pulley & PTO System ExplainedDocument17 pagesBelt Pulley & PTO System ExplainedFoo He XuanNo ratings yet
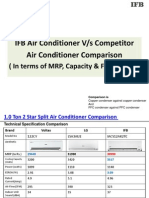
- IFB AC ComparisonDocument26 pagesIFB AC ComparisonVidhya JeyaramanNo ratings yet
- SKF ConCentra Ball Bearings Units - 6107 - I - ENDocument28 pagesSKF ConCentra Ball Bearings Units - 6107 - I - ENfcrosa100% (1)
- Hyundai Universe PDFDocument16 pagesHyundai Universe PDFMelvin Gascon33% (3)
- Thermax Engineering Construction Co. LTD: Crane Inspection ChecklistDocument2 pagesThermax Engineering Construction Co. LTD: Crane Inspection ChecklistSrinivasa Rao VenkumahanthiNo ratings yet
- Automobile IndustryDocument9 pagesAutomobile IndustrySuraj SharmaNo ratings yet
- Testers For Electric Motors and All Kinds of Windings: Product GuideDocument29 pagesTesters For Electric Motors and All Kinds of Windings: Product GuideMohamedNo ratings yet
- February Techlink 2013Document9 pagesFebruary Techlink 2013fulltransmissionNo ratings yet
- ASE Auto HRDocument78 pagesASE Auto HRRavi RanjanNo ratings yet
- Marketing WarfareDocument10 pagesMarketing Warfareshweta_46664100% (1)
- What Is Customer Relationship Management (CRM) ?Document4 pagesWhat Is Customer Relationship Management (CRM) ?MALAY KUMARNo ratings yet
- Ravindra Yamaha-1Document36 pagesRavindra Yamaha-1shubhambhartia09No ratings yet
- 2014 Book AutomotiveBatteryTechnology PDFDocument135 pages2014 Book AutomotiveBatteryTechnology PDFFrank AcostaNo ratings yet
- Central Council for Research in Unani Medicine Conveyance FormDocument3 pagesCentral Council for Research in Unani Medicine Conveyance FormANURAG SHARMANo ratings yet
- Toyota SynopsisDocument22 pagesToyota SynopsisGunjan AroraNo ratings yet
- PCP 96175276 PDFDocument3 pagesPCP 96175276 PDFpvsairam100% (5)
- 84460006air Hydraulic ActuatorsDocument20 pages84460006air Hydraulic ActuatorsteruretefuNo ratings yet
- Cycletone SDN BHD: 1. The Parties To This Agreement Are: 1.1 The OwnerDocument4 pagesCycletone SDN BHD: 1. The Parties To This Agreement Are: 1.1 The OwnerShahrizam RahimNo ratings yet
- Urban Roads TRIP Report October 2018Document24 pagesUrban Roads TRIP Report October 2018HPR NewsNo ratings yet
- Mary KayDocument16 pagesMary Kaytanhaitanha100% (1)
- Aiag Vda FmeaDocument244 pagesAiag Vda Fmeav56btmnrc4No ratings yet
- Marketing VolkswagenDocument9 pagesMarketing VolkswagenYuvraaj YadavNo ratings yet
- Transmission Case StudyDocument35 pagesTransmission Case StudyPratik AgrawalNo ratings yet
- A Study On The Impact of Demerger and Its Effects On Sales Revenue and Customer LevelDocument94 pagesA Study On The Impact of Demerger and Its Effects On Sales Revenue and Customer Levelsachin mohanNo ratings yet
- Maruthi and Hyandi AssigementDocument12 pagesMaruthi and Hyandi AssigementKiran RajNo ratings yet