You might also like
- Tuning of Pid Gains by Trial and ErrorDocument4 pagesTuning of Pid Gains by Trial and ErrorSajjad IdreesNo ratings yet
- Minimum IAE Tuning RulesDocument11 pagesMinimum IAE Tuning RulesjgkrishnanNo ratings yet
- Power Plant Familiarisation and DCS AdvantagesDocument22 pagesPower Plant Familiarisation and DCS AdvantagesSethu NaiduNo ratings yet
- SPPA-T1000 System OverviewDocument14 pagesSPPA-T1000 System OverviewNAYEEMNo ratings yet
- Electric Drives and Controls Pneumatics Service Linear Motion and Assembly Technologies HydraulicsDocument102 pagesElectric Drives and Controls Pneumatics Service Linear Motion and Assembly Technologies HydraulicsAnderson ThiagoNo ratings yet
- Developing A Control Logic SpecificationDocument21 pagesDeveloping A Control Logic SpecificationkaicyemNo ratings yet
- Turbine governor model data sheetsDocument13 pagesTurbine governor model data sheetskomiks0609No ratings yet
- Control of Heat Recovery Steam GeneratorDocument5 pagesControl of Heat Recovery Steam Generatordrmsrmurty9473100% (5)
- Flame ScannerDocument4 pagesFlame ScannerAlok Kumar NayakNo ratings yet
- Procon LDS Maintenance Manual-R5Document18 pagesProcon LDS Maintenance Manual-R5Watchara ThepjanNo ratings yet
- Plexos 6205Document6 pagesPlexos 6205Horacio EneroNo ratings yet
- AhmadJavaid (TZIDC ABB Positioner)Document17 pagesAhmadJavaid (TZIDC ABB Positioner)ahmedNo ratings yet
- 1-Plant Control Design 27LH2V v7 0Document61 pages1-Plant Control Design 27LH2V v7 0TheVirus Papa100% (1)
- Equipment Manual IntroductionDocument47 pagesEquipment Manual IntroductionAnkit Malhotra100% (2)
- CAO Manual Guidebook FINALDocument129 pagesCAO Manual Guidebook FINALFathur Ar-rahmanNo ratings yet
- CHE3162.Lecture11 CascadeDocument33 pagesCHE3162.Lecture11 Cascadexhche7No ratings yet
- DCS Training AddressDocument6 pagesDCS Training Addressanon-557231100% (1)
- Sistema de Control 2Document98 pagesSistema de Control 2Esteban CastellanoNo ratings yet
- Treon Introduction - Industrial NodeDocument11 pagesTreon Introduction - Industrial NodeAibek AltynbekNo ratings yet
- Pnspo!: Modbus Solution Cp1H / Cp1L / Cj1 / Cj2 / Cs1Document17 pagesPnspo!: Modbus Solution Cp1H / Cp1L / Cj1 / Cj2 / Cs1jmauricio19100% (1)
- PID ControlDocument22 pagesPID ControlJessica RossNo ratings yet
- MATLAB - Modelling in Time Domain - Norman NiseDocument3 pagesMATLAB - Modelling in Time Domain - Norman Niseichigo325No ratings yet
- E31404 Interlock List - FieldUpdates 291210 DCSDocument4 pagesE31404 Interlock List - FieldUpdates 291210 DCSrgonzalezmunozNo ratings yet
- Desmoke System p.155-173Document19 pagesDesmoke System p.155-173Just RysdanNo ratings yet
- Internship ReportDocument39 pagesInternship ReportUtkarsh YadavNo ratings yet
- Lecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Document61 pagesLecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Rama KrishnaNo ratings yet
- SIAD Engineering ASU LeaderDocument8 pagesSIAD Engineering ASU LeaderFarshad AsgariNo ratings yet
- Reference LAC50 DMDocument41 pagesReference LAC50 DMVivek Singh100% (1)
- AutomaticControlforMechanicalEngineersByM GalalRabieoptDocument176 pagesAutomaticControlforMechanicalEngineersByM GalalRabieoptHectorVasquezLaraNo ratings yet
- Hydrocom Specification Petronor NP HISA V1 - 0Document33 pagesHydrocom Specification Petronor NP HISA V1 - 0Nattapong Pongboot100% (1)
- Opal Generator Annunciator - Turbine V1 - Rev CDocument35 pagesOpal Generator Annunciator - Turbine V1 - Rev CRaj ChavanNo ratings yet
- 7.21 TGOV1: Steam Turbine-GovernorDocument2 pages7.21 TGOV1: Steam Turbine-GovernorMuthukumar SNo ratings yet
- # 6 - 1 Attachment ABB DCSDocument4 pages# 6 - 1 Attachment ABB DCSKevin NgoNo ratings yet
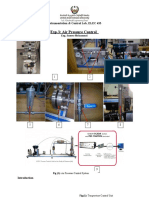
- Exp3 - Air Pressure ControlDocument8 pagesExp3 - Air Pressure ControlDon LawrenceNo ratings yet
- Risk Assessment of Thermal Power Plant PDFDocument6 pagesRisk Assessment of Thermal Power Plant PDFMuhammad.SaimNo ratings yet
- HAZOP ANALYSIS GUIDEDocument27 pagesHAZOP ANALYSIS GUIDEtrieuNo ratings yet
- Cause & Effect DiagramDocument4 pagesCause & Effect DiagramviqibagasNo ratings yet
- Installation, Operation and Maintenance InstructionsDocument72 pagesInstallation, Operation and Maintenance InstructionsSamuel Duruibe100% (1)
- Part-2 - Section 7 - Static Digital Excitation System - Particular Technical SpecificationDocument71 pagesPart-2 - Section 7 - Static Digital Excitation System - Particular Technical SpecificationAli HEIDARINo ratings yet
- Model Based ControlDocument6 pagesModel Based ControlIvan RadovicNo ratings yet
- Dynamic Matrix Control - A Computer Control AlgorithmDocument7 pagesDynamic Matrix Control - A Computer Control Algorithmquinteroudina50% (2)
- 2VAA003743 HR D en Symphony Plus S I O SD Series Digital I ODocument6 pages2VAA003743 HR D en Symphony Plus S I O SD Series Digital I OEnergon100% (2)
- Controls Engineer InterviewDocument3 pagesControls Engineer Interviewrhoney0120% (1)
- 2VAA005093 HR D en Series Control and IO Lo-Res BrochureDocument7 pages2VAA005093 HR D en Series Control and IO Lo-Res BrochureJulioNo ratings yet
- NUBERG Hydrogen Peroxide PlantsDocument4 pagesNUBERG Hydrogen Peroxide PlantsViqiNo ratings yet
- Dmcplus™ For Honeywell TDC 3000 User'S Guide: Reach Your True PotentialDocument92 pagesDmcplus™ For Honeywell TDC 3000 User'S Guide: Reach Your True Potentialluan zhiye0% (1)
- Guided Wave Radar in Steam Boiler Service: Measuring Water Level Accurately Despite ChallengesDocument14 pagesGuided Wave Radar in Steam Boiler Service: Measuring Water Level Accurately Despite ChallengesRoger SeaverNo ratings yet
- HC900 ControllerDocument75 pagesHC900 Controllerthanh_cdt01No ratings yet
- Close Loop Control Sys IntroDocument7 pagesClose Loop Control Sys IntroDwi Mulyanti DwimulyantishopNo ratings yet
- PUB060-001-00 - 1110 RCL NetworksDocument8 pagesPUB060-001-00 - 1110 RCL NetworksapisituNo ratings yet
- 14 Exercises enDocument68 pages14 Exercises enRobertoNo ratings yet
- Pds 4526 em Des 86 r400 Rev02 0 Process Simulation Fundamentals Process Modelling Using Unisim DesignDocument1 pagePds 4526 em Des 86 r400 Rev02 0 Process Simulation Fundamentals Process Modelling Using Unisim Designharde2lahNo ratings yet
- What Is Instrument I - O ListDocument1 pageWhat Is Instrument I - O ListzhangyiliNo ratings yet
- ISA StandardsDocument3 pagesISA Standardschandushar1604No ratings yet
- Deep Vacuum PrinciplesDocument4 pagesDeep Vacuum PrinciplesJohnMerrNo ratings yet
- Dead Weight TestersDocument5 pagesDead Weight TestersShrikant EkboteNo ratings yet
- VArticle - Thermal Design of APFC PanelsDocument4 pagesVArticle - Thermal Design of APFC PanelsChandru RangarajNo ratings yet
- 09 Chapter 3Document100 pages09 Chapter 3Uma Mageshwari100% (2)
- Revised Answer Key Isro 2018Document5 pagesRevised Answer Key Isro 2018pallavi guptaNo ratings yet
- Toyota Innova Crysta 2.4 GX MT Brochure PDFDocument14 pagesToyota Innova Crysta 2.4 GX MT Brochure PDFUma MageshwariNo ratings yet
- PS Mpu 6000aDocument57 pagesPS Mpu 6000aUma MageshwariNo ratings yet
- CATIA Labsheets PDFDocument31 pagesCATIA Labsheets PDFNagaraj KaluvacharlaNo ratings yet
- Orthographic Views in Multiview Drawings: Autocad 2015 Tutorial: 2D Fundamentals 5-1Document30 pagesOrthographic Views in Multiview Drawings: Autocad 2015 Tutorial: 2D Fundamentals 5-1Uma MageshwariNo ratings yet
- 12 Chapter 3Document70 pages12 Chapter 3Uma MageshwariNo ratings yet
- Me Cad Cam R 2013Document27 pagesMe Cad Cam R 2013Uma MageshwariNo ratings yet
- Signal Design Optimization for Radar Detection and EstimationDocument13 pagesSignal Design Optimization for Radar Detection and EstimationUma MageshwariNo ratings yet
- AbstractDocument210 pagesAbstractUma MageshwariNo ratings yet
- RM PDFDocument57 pagesRM PDFUma MageshwariNo ratings yet
- Biological Cybernetics: Prediction of A Moving Target's Position in Fast Goal-Directed ActionDocument10 pagesBiological Cybernetics: Prediction of A Moving Target's Position in Fast Goal-Directed ActionUma MageshwariNo ratings yet
- RM PDFDocument57 pagesRM PDFUma MageshwariNo ratings yet
- Orthographic ProjectionDocument16 pagesOrthographic ProjectionssaygunNo ratings yet
- Covariance Matrix EstimationDocument14 pagesCovariance Matrix EstimationUma MageshwariNo ratings yet
- CRB For Low-Rank DecompositionDocument13 pagesCRB For Low-Rank DecompositionUma MageshwariNo ratings yet
- Rocket Equation Derivation NotesDocument7 pagesRocket Equation Derivation NotesSrikar GhooliNo ratings yet
- Old Question PaperDocument5 pagesOld Question PaperUma MageshwariNo ratings yet
- Geometry of CRBDocument4 pagesGeometry of CRBUma MageshwariNo ratings yet
- Detection PDFDocument3 pagesDetection PDFUma MageshwariNo ratings yet
- IEEE Joint Angles Using Accelerometer and GyroscopeDocument7 pagesIEEE Joint Angles Using Accelerometer and GyroscopeUma MageshwariNo ratings yet
- Electronics 06 00015 v2Document18 pagesElectronics 06 00015 v2Uma MageshwariNo ratings yet
- Aero 2n v2Document29 pagesAero 2n v2Uma MageshwariNo ratings yet
- Channel Estimation For Ultra-Wideband CommDocument8 pagesChannel Estimation For Ultra-Wideband CommUma MageshwariNo ratings yet
- 8Document4 pages8Uma MageshwariNo ratings yet
- MECH 581a4 Rocket Propulsion Class Notes - Page: 1 Notes02.doc Thrust and The Rocket Equation Text: Sutton Ch. 2 and 4 Technical ObjectivesDocument9 pagesMECH 581a4 Rocket Propulsion Class Notes - Page: 1 Notes02.doc Thrust and The Rocket Equation Text: Sutton Ch. 2 and 4 Technical ObjectivesUma MageshwariNo ratings yet
- 19880010925Document24 pages19880010925Uma MageshwariNo ratings yet
- XMPL 421 1st Order 01 PDFDocument11 pagesXMPL 421 1st Order 01 PDFLourdhu Sagaya Jayakumar JNo ratings yet
- 4 out of 5 dentists recommend this multi-stage rocket siteDocument9 pages4 out of 5 dentists recommend this multi-stage rocket siteUma MageshwariNo ratings yet
- Rocket Equation Derivation NotesDocument7 pagesRocket Equation Derivation NotesSrikar GhooliNo ratings yet
- Nutrition Effects of VitaminsDocument21 pagesNutrition Effects of Vitaminsblessed cccNo ratings yet
- 03.can-Bus and Sae-Bus j1939 - CatDocument29 pages03.can-Bus and Sae-Bus j1939 - CatEdison Pfoccori BarrionuevoNo ratings yet
- HHG4M - Lifespan Development Textbook Lesson 4Document88 pagesHHG4M - Lifespan Development Textbook Lesson 4Lubomira SucheckiNo ratings yet
- Nokia N97 User Guide: 9221217 Issue 2.0Document76 pagesNokia N97 User Guide: 9221217 Issue 2.0Boris CavarNo ratings yet
- Artikel Ilmiah FikriDocument6 pagesArtikel Ilmiah FikriViola Mei DamayantiNo ratings yet
- List of Computer Networking DevicesDocument1 pageList of Computer Networking Deviceskamit17102900100% (1)
- Astrological Terms A-ZDocument63 pagesAstrological Terms A-Zmahadp08100% (1)
- Akshay 71 Seminar ReportDocument22 pagesAkshay 71 Seminar ReportSanket Yadav25% (4)
- Chapter 1 - Introduction To Machinery PrinciplesDocument27 pagesChapter 1 - Introduction To Machinery PrinciplesYousab CreatorNo ratings yet
- Large and Medium Manufacturing Industry Survey Report 2018Document778 pagesLarge and Medium Manufacturing Industry Survey Report 2018melakuNo ratings yet
- Overview of Pathophysiology of Hypoxemia and HypoxiaDocument15 pagesOverview of Pathophysiology of Hypoxemia and HypoxiaMARY ANN CAGATANNo ratings yet
- Classified Advertisements from Gulf Times NewspaperDocument6 pagesClassified Advertisements from Gulf Times NewspaperAli Naveed FarookiNo ratings yet
- Tween 80Document11 pagesTween 80fvdxrgNo ratings yet
- Matrix Analysis of Group Structure Reveals Key InsightsDocument22 pagesMatrix Analysis of Group Structure Reveals Key InsightsMahnooranjumNo ratings yet
- VCDS Scan Reveals Faults in HVAC, ABS and Transmission SystemsDocument4 pagesVCDS Scan Reveals Faults in HVAC, ABS and Transmission SystemsDan MirceaNo ratings yet
- Common Sense Mechanics 9Document9 pagesCommon Sense Mechanics 9Vikas VatsNo ratings yet
- DUB01CB Eng PDFDocument4 pagesDUB01CB Eng PDFAnonymous hj273CMNo ratings yet
- Mar For M: I MMQ SeriesDocument28 pagesMar For M: I MMQ SeriesIpal Febri NartaNo ratings yet
- SB632B Connecting Rod IdentificationDocument20 pagesSB632B Connecting Rod IdentificationLuisCheukoCheuquianNo ratings yet
- Wyoming County Fair (2022)Document20 pagesWyoming County Fair (2022)Watertown Daily TimesNo ratings yet
- English Test 6Document87 pagesEnglish Test 6Ha PhanNo ratings yet
- PCS PADDLE SHIFTER INSTALL GUIDEDocument21 pagesPCS PADDLE SHIFTER INSTALL GUIDEAndreas T P ManurungNo ratings yet
- Makalah Bahasa Inggris - Narrative TextDocument21 pagesMakalah Bahasa Inggris - Narrative TextFenny KartikaNo ratings yet
- Carl Sagan Wonder and Skepticism SecDocument13 pagesCarl Sagan Wonder and Skepticism SecAndreea BanagaNo ratings yet
- Paradise Pools Flyer With Price ListDocument5 pagesParadise Pools Flyer With Price ListKhuzaima HussainNo ratings yet
- 1 s2.0 S2210803316300781 MainDocument8 pages1 s2.0 S2210803316300781 MainGilang Aji P. EmonNo ratings yet
- Mouse Deer and TigerDocument2 pagesMouse Deer and Tigeralan.nevgan100% (1)
- Integrating Kuleana Rights and Land Trust PrioritesDocument50 pagesIntegrating Kuleana Rights and Land Trust PrioritesKeala Rodenhurst-JamesNo ratings yet
- 2 History of OrthodonticsDocument11 pages2 History of OrthodonticsMeiz JaleelNo ratings yet
- Modeling Vessel Impacts for Lock Wall DesignDocument15 pagesModeling Vessel Impacts for Lock Wall DesignSalam FaithNo ratings yet