You might also like
- Mathematics For Machine LearningDocument417 pagesMathematics For Machine LearningLê Mạnh93% (28)
- Inner ProductDocument40 pagesInner ProductArpan ChoudhuryNo ratings yet
- Mathematics For Machine LearningDocument417 pagesMathematics For Machine LearningLê Mạnh93% (28)
- Tiong Meng Chung, Hamdan Daniyal, Mohd Herwan Sulaiman, Mohd Shafie BakarDocument6 pagesTiong Meng Chung, Hamdan Daniyal, Mohd Herwan Sulaiman, Mohd Shafie BakarNguyễn Bình NamNo ratings yet
- Fuzzy Logic Fundamentals With Matlab: By: Hossein TootoonchyDocument8 pagesFuzzy Logic Fundamentals With Matlab: By: Hossein TootoonchyNguyễn Bình NamNo ratings yet
- IntroCtrlSys Chapter1 PDFDocument66 pagesIntroCtrlSys Chapter1 PDFNguyễn Bình NamNo ratings yet
- LaTeX Mathematical SymbolsDocument4 pagesLaTeX Mathematical Symbolsjfreyre100% (9)
- MIT6 241JS11 chap27LecturesonDynamicSystemsandControl PDFDocument11 pagesMIT6 241JS11 chap27LecturesonDynamicSystemsandControl PDFNguyễn Bình NamNo ratings yet
- 101 Declaration ADocument2 pages101 Declaration ANguyễn Bình NamNo ratings yet
- CAD Report Format Power Electronics DesignDocument6 pagesCAD Report Format Power Electronics DesignNguyễn Bình NamNo ratings yet
- Detailed Analysis of Micro-Grid Stability During Islanding Mode Under Different Load ConditionsDocument9 pagesDetailed Analysis of Micro-Grid Stability During Islanding Mode Under Different Load ConditionsDulal MannaNo ratings yet
- Letter of Recommendation Sample 3Document1 pageLetter of Recommendation Sample 3emma03No ratings yet
- PicDocument42 pagesPicNguyễn Bình Nam100% (1)
- So Sanh P&O, Advance - P&O - Fuzzy...Document12 pagesSo Sanh P&O, Advance - P&O - Fuzzy...Nguyễn Bình NamNo ratings yet
- Design and Evaluation of GaN-Based Dual-Phase Interleaved MHZ Critical ModeDocument6 pagesDesign and Evaluation of GaN-Based Dual-Phase Interleaved MHZ Critical ModeNguyễn Bình NamNo ratings yet
- Chong Bao So 14 Cua Thanh Pho DNDocument2 pagesChong Bao So 14 Cua Thanh Pho DNNguyễn Bình NamNo ratings yet
- Chap2 Mobile Wireless Channels v3Document25 pagesChap2 Mobile Wireless Channels v3Nguyễn Bình NamNo ratings yet
- IELTS WritingDocument32 pagesIELTS WritingNguyễn Bình Nam100% (1)
- Square Wave SourcesDocument18 pagesSquare Wave SourcesNguyễn Bình NamNo ratings yet
- Letter of Recommendation Sample 3Document1 pageLetter of Recommendation Sample 3emma03No ratings yet
- Letter of Recommendation Sample 1Document1 pageLetter of Recommendation Sample 1Arvind MuraliNo ratings yet
- Low-Data-Rate Narrow-Band Power-Line Communication On The European DomesticDocument4 pagesLow-Data-Rate Narrow-Band Power-Line Communication On The European DomesticNguyễn Bình NamNo ratings yet
- IELTS Reading Practice 1 (Academic) Time Allowed: 1 Hour Number of Questions: 40 Instructions All Answers Must Be Written On The Answer SheetDocument91 pagesIELTS Reading Practice 1 (Academic) Time Allowed: 1 Hour Number of Questions: 40 Instructions All Answers Must Be Written On The Answer SheetNguyễn Bình Nam50% (2)
- MIPS Green SheetDocument2 pagesMIPS Green SheetjasontgameNo ratings yet
- VisioTutorial PDFDocument14 pagesVisioTutorial PDFMatias BarnetoNo ratings yet
- La Place TransformDocument35 pagesLa Place TransformAhmed Sakr (أحمد صقر)No ratings yet
- Mplabx Ccs TutorialDocument17 pagesMplabx Ccs TutorialNguyễn Bình NamNo ratings yet
- IELTS WritingDocument32 pagesIELTS WritingNguyễn Bình Nam100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Coriolis - Atlas CompendiumDocument62 pagesCoriolis - Atlas CompendiumSquamata100% (2)
- Case Study OrthoDocument21 pagesCase Study Orthojoshua_santiago_5No ratings yet
- The Unseelie Prince Maze of Shadows Book 1 by Kathryn AnnDocument267 pagesThe Unseelie Prince Maze of Shadows Book 1 by Kathryn Annanissa Hri50% (2)
- Ballari City Corporation: Government of KarnatakaDocument37 pagesBallari City Corporation: Government of KarnatakaManish HbNo ratings yet
- Lab 1 Boys CalorimeterDocument11 pagesLab 1 Boys CalorimeterHafizszul Feyzul100% (1)
- PENGARUH CYBERBULLYING BODY SHAMING TERHADAP KEPERCAYAAN DIRIDocument15 pagesPENGARUH CYBERBULLYING BODY SHAMING TERHADAP KEPERCAYAAN DIRIRizky Hizrah WumuNo ratings yet
- BA50BCODocument6 pagesBA50BCOpedroarlindo-1No ratings yet
- DRUG LISTDocument45 pagesDRUG LISTAmitKumarNo ratings yet
- Flexural Analysis of Beams (Part 2)Document7 pagesFlexural Analysis of Beams (Part 2)Johnnette Nafuerza AggabaoNo ratings yet
- GF26.10-S-0002S Manual Transmission (MT), Function 9.7.03 Transmission 716.6 in MODEL 639.601 /603 /605 /701 /703 /705 /711 /713 /811 /813 /815Document2 pagesGF26.10-S-0002S Manual Transmission (MT), Function 9.7.03 Transmission 716.6 in MODEL 639.601 /603 /605 /701 /703 /705 /711 /713 /811 /813 /815Sven GoshcNo ratings yet
- Isaac Asimov - "Nightfall"Document20 pagesIsaac Asimov - "Nightfall"Aditya Sharma100% (1)
- India's 1991 Economic ReformsDocument5 pagesIndia's 1991 Economic ReformsLive AspireNo ratings yet
- E Series CatalystDocument1 pageE Series CatalystEmiZNo ratings yet
- Lease of Residential HouseDocument4 pagesLease of Residential HousedenvergamlosenNo ratings yet
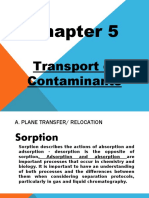
- Chapter 5Document11 pagesChapter 5XDXDXDNo ratings yet
- ACCA P1 Governance, Risk, and Ethics - Revision QuestionsDocument2 pagesACCA P1 Governance, Risk, and Ethics - Revision QuestionsChan Tsu ChongNo ratings yet
- Axis Bank Placement Paper Interview Questions 48072Document3 pagesAxis Bank Placement Paper Interview Questions 48072Ravi RanjanNo ratings yet
- Communication Networks Chapter 1 SolutionsDocument10 pagesCommunication Networks Chapter 1 SolutionsJ PrakashNo ratings yet
- Liebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning UnitDocument19 pagesLiebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning Unitjuan guerreroNo ratings yet
- Eurapipe ABS Pipe - Fittings ManualDocument52 pagesEurapipe ABS Pipe - Fittings ManualLê Minh ĐứcNo ratings yet
- Rapid ECG Interpretation Skills ChallengeDocument91 pagesRapid ECG Interpretation Skills ChallengeMiguel LizarragaNo ratings yet
- 1989 Volvo 740 Instruments and ControlsDocument107 pages1989 Volvo 740 Instruments and Controlsskyliner538No ratings yet
- Ecma L1221BR3 PD02 05172016Document2 pagesEcma L1221BR3 PD02 05172016Anil JindalNo ratings yet
- A Secret Baby by The Bratva by Lexi AsherDocument184 pagesA Secret Baby by The Bratva by Lexi Asheralisa sanchez100% (1)
- Berserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional StrengthDocument10 pagesBerserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional Strengthluciferr71No ratings yet
- Calculate Capacity of Room Air Conditioner: Room Detail Unit Electrical Appliances in The RoomDocument2 pagesCalculate Capacity of Room Air Conditioner: Room Detail Unit Electrical Appliances in The Roomzmei23No ratings yet
- Baella-Silva v. Hulsey, 454 F.3d 5, 1st Cir. (2006)Document9 pagesBaella-Silva v. Hulsey, 454 F.3d 5, 1st Cir. (2006)Scribd Government DocsNo ratings yet
- Chapter 63 Standard Integration: EXERCISE 256 Page 707Document9 pagesChapter 63 Standard Integration: EXERCISE 256 Page 707Khaerul UmamNo ratings yet
- NT140WHM N46Document34 pagesNT140WHM N46arif.fahmiNo ratings yet
- M Audio bx10s Manuel Utilisateur en 27417Document8 pagesM Audio bx10s Manuel Utilisateur en 27417TokioNo ratings yet