You might also like
- How To Decide With Criteria and WeightDocument3 pagesHow To Decide With Criteria and WeightJuan AraqueNo ratings yet
- Feeder TablesDocument12 pagesFeeder TablesWilly RochaNo ratings yet
- Variable Speed DrivesDocument41 pagesVariable Speed DrivesJuan AraqueNo ratings yet
- Corrosion TheoryDocument10 pagesCorrosion Theory7amada11100% (1)
- Lightning Protection SystemDocument10 pagesLightning Protection SystemJuan Araque100% (1)
- Edsa PaladinDocument50 pagesEdsa PaladinIulian PârjoleanuNo ratings yet
- MV Cable TestingDocument6 pagesMV Cable TestingJuan AraqueNo ratings yet
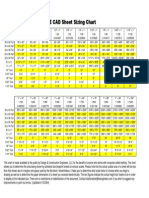
- CAD Sizing ChartDocument1 pageCAD Sizing ChartEdupuganti Sujith KumarNo ratings yet
- Modelling WorkshopDocument38 pagesModelling WorkshopJuan AraqueNo ratings yet
- Electrical Inspection and ToolsDocument4 pagesElectrical Inspection and ToolsJuan AraqueNo ratings yet
- Electric Power RequirementsDocument27 pagesElectric Power RequirementsJuan AraqueNo ratings yet
- Fuse Block Terminal For Nissan TiidaDocument1 pageFuse Block Terminal For Nissan TiidaJuan AraqueNo ratings yet
- Microsoft PowerPoint - Motor Protection Principles 101308.Ppt - Motor Protection PrinciplesDocument35 pagesMicrosoft PowerPoint - Motor Protection Principles 101308.Ppt - Motor Protection PrinciplesPaneendra Kumar0% (1)
- Lightning Protection SystemDocument10 pagesLightning Protection SystemJuan Araque100% (1)
- Shielded vs Non-Shielded Cables: Changes in the NECDocument20 pagesShielded vs Non-Shielded Cables: Changes in the NECJuan AraqueNo ratings yet
- 2010 Nissan VersaDocument338 pages2010 Nissan VersaChristian HammNo ratings yet
- Electric Load Management in IndustryDocument90 pagesElectric Load Management in IndustryHans De Keulenaer100% (23)
- Brochure Gas Turbine SGT-800 For Power GenerationDocument4 pagesBrochure Gas Turbine SGT-800 For Power GenerationJuan AraqueNo ratings yet
- Electric Load Management in IndustryDocument90 pagesElectric Load Management in IndustryHans De Keulenaer100% (23)
- Application Guideline For Electric Motor Drive Equipment For Natural Gas CompressorsDocument81 pagesApplication Guideline For Electric Motor Drive Equipment For Natural Gas CompressorsJuan AraqueNo ratings yet
- Conduit Color CodeDocument3 pagesConduit Color CodeJuan AraqueNo ratings yet
- Appendix 2 - ANSI&IEC Relay SymbolsDocument2 pagesAppendix 2 - ANSI&IEC Relay Symbolsapi-3697422100% (2)
- Lexe6274 01Document8 pagesLexe6274 01Juan AraqueNo ratings yet
- Applying Demand & Diversity FactorDocument5 pagesApplying Demand & Diversity Factoranchak99100% (1)
- Conduit or Cable TrayDocument2 pagesConduit or Cable TrayJuan AraqueNo ratings yet
- Applying Demand & Diversity FactorDocument5 pagesApplying Demand & Diversity Factoranchak99100% (1)
- NEMA FAQ EnclosuresDocument23 pagesNEMA FAQ EnclosureskarimakkiNo ratings yet
- Applying Demand & Diversity FactorDocument5 pagesApplying Demand & Diversity Factoranchak99100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Power Eletronics-UJTDocument41 pagesPower Eletronics-UJTDarshan BendreNo ratings yet
- Physics Experiment - 2Document3 pagesPhysics Experiment - 2Sandipan SamantaNo ratings yet
- Menu for Chopper System Technical ManualDocument24 pagesMenu for Chopper System Technical ManualAdam SchwemleinNo ratings yet
- SSS 7 Edition MANUAL The Analysis and Designs of Linear Circuit PDFDocument987 pagesSSS 7 Edition MANUAL The Analysis and Designs of Linear Circuit PDFEngr Azeem Awan100% (3)
- Sensible Transformer Maintenance PartDocument7 pagesSensible Transformer Maintenance Partdetroit44No ratings yet
- Losses in a D.C. Machine ExplainedDocument5 pagesLosses in a D.C. Machine ExplainedSerwan Bamerni100% (1)
- Rugged Industrial Pressure Transducers for Harsh EnvironmentsDocument8 pagesRugged Industrial Pressure Transducers for Harsh EnvironmentsEverton AlvesNo ratings yet
- Resistors: by Zain Ali, 9b 90% Google FreeDocument9 pagesResistors: by Zain Ali, 9b 90% Google FreeZain AliNo ratings yet
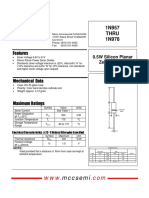
- Mccsemi:) HdwxuhvDocument2 pagesMccsemi:) HdwxuhvfreddyNo ratings yet
- Glulam Timber Structures DesignDocument13 pagesGlulam Timber Structures DesignClaudia TrifNo ratings yet
- Manual Universal II Level Transmitter - EnglishDocument40 pagesManual Universal II Level Transmitter - EnglishFernando Alves PereiraNo ratings yet
- Kirchhoff's LawsDocument3 pagesKirchhoff's Lawsحسين ابو حامدNo ratings yet
- SEM203P Instruction ManualDocument2 pagesSEM203P Instruction ManualDaniel Adi SaputraNo ratings yet
- HVAC Control SystemDocument111 pagesHVAC Control Systemjvfcv100% (1)
- Catalogue Imatek - VN EditionDocument18 pagesCatalogue Imatek - VN Editionlilama45-1No ratings yet
- STB80PF55 STP80PF55: P-Channel 55V - 0.016 - 80A - TO-220 - D PAK Stripfet™ Ii Power MosfetDocument13 pagesSTB80PF55 STP80PF55: P-Channel 55V - 0.016 - 80A - TO-220 - D PAK Stripfet™ Ii Power MosfetnotmikemikeNo ratings yet
- LDR Circuit Phy Class12Document29 pagesLDR Circuit Phy Class12RIYA DHAKAANNo ratings yet
- Tutorial1 2Document5 pagesTutorial1 2Khairil IkramNo ratings yet
- SET1RMEDocument5 pagesSET1RMEJohn Paul BruanNo ratings yet
- Event Code Group 500 (GPC3020 Up To 08/2012) : Lectrical YstemDocument7 pagesEvent Code Group 500 (GPC3020 Up To 08/2012) : Lectrical Ystemmarceloo1993No ratings yet
- 20 PlysilDocument1 page20 PlysilJuan AdrianzenNo ratings yet
- Microwaves101 - Smith Chart BasicsDocument5 pagesMicrowaves101 - Smith Chart BasicsAghna Tiyas MandalNo ratings yet
- Measuring The Complex Permittivity and Permeability of Lossy MaterialsDocument156 pagesMeasuring The Complex Permittivity and Permeability of Lossy Materialsok123jumpNo ratings yet
- Type SF - 1PR X 1.00mm2Document3 pagesType SF - 1PR X 1.00mm2spermhellNo ratings yet
- FDocument30 pagesFestionsNo ratings yet
- Lesson Plan 10 ElectricityDocument12 pagesLesson Plan 10 Electricityjatinder kaur100% (7)
- C612Document5 pagesC612Alexandre GomesNo ratings yet
- Rights Reserved) - Website, Permitted.: Compliance Verification of ESD Protective Equipment and MaterialsDocument45 pagesRights Reserved) - Website, Permitted.: Compliance Verification of ESD Protective Equipment and MaterialsIvan Dario Oyola RNo ratings yet
- Travel Sensor For Linear Actuators: ConstructionDocument2 pagesTravel Sensor For Linear Actuators: ConstructionOanea SilviuNo ratings yet
- Strain Gauge Principle, Features & UsesDocument9 pagesStrain Gauge Principle, Features & UsesAAKASHNo ratings yet