You might also like
- Ge Af300 LV VFDDocument158 pagesGe Af300 LV VFDBill CaiNo ratings yet
- Liquidtight FMC Fittings CrouseHindsDocument4 pagesLiquidtight FMC Fittings CrouseHindsBill CaiNo ratings yet
- Cooper Bussmann QuCooper Bussmann Quik-Spec Series of Product SpecsDocument6 pagesCooper Bussmann QuCooper Bussmann Quik-Spec Series of Product SpecsBill CaiNo ratings yet
- Cooper Bussmann Low-Peak CUBEFuseDocument2 pagesCooper Bussmann Low-Peak CUBEFuseBill CaiNo ratings yet
- Review of Sys GroundingDocument38 pagesReview of Sys GroundingChilamkurti Siva Sankara RaoNo ratings yet
- Basler Transformer Protection Application Guide PDFDocument33 pagesBasler Transformer Protection Application Guide PDFAbrakain69No ratings yet
- Ground Differential Protection MethodsDocument9 pagesGround Differential Protection MethodsBill CaiNo ratings yet
- VFD Braking Resistor - PowerohmDocument8 pagesVFD Braking Resistor - PowerohmBill CaiNo ratings yet
- Cooper Bussman Quik-Spec Coordination PanelboardDocument24 pagesCooper Bussman Quik-Spec Coordination PanelboardBill CaiNo ratings yet
- Squared MCCB 2004Document174 pagesSquared MCCB 2004Bill CaiNo ratings yet
- Busprot 3Document57 pagesBusprot 3Jeffrey S CadmanNo ratings yet
- Load ShedDocument41 pagesLoad ShedTayyab SaeedNo ratings yet
- Myths BaslerDocument15 pagesMyths BaslerBill CaiNo ratings yet
- Basler Harmonic GuideDocument25 pagesBasler Harmonic GuideBill CaiNo ratings yet
- Directional Overcurrent Relaying ConceptsDocument14 pagesDirectional Overcurrent Relaying ConceptsAji Istanto Rambono100% (1)
- Three Phase Transformer Winding ConfigurationsDocument40 pagesThree Phase Transformer Winding ConfigurationsbudanaNo ratings yet
- Power System Transient Anna University Notes in PDFDocument44 pagesPower System Transient Anna University Notes in PDFLeng SovannarithNo ratings yet
- Green PowerDocument22 pagesGreen PowerBill CaiNo ratings yet
- MATLAB Simulation of Power System FaultDocument6 pagesMATLAB Simulation of Power System FaultBill CaiNo ratings yet
- GE Lockout Relay HEA ManualDocument6 pagesGE Lockout Relay HEA ManualBill CaiNo ratings yet
- GE Lockout Relay GEH2058 ManualDocument30 pagesGE Lockout Relay GEH2058 ManualBill CaiNo ratings yet
- Atp Quick GuideDocument34 pagesAtp Quick Guideingrid_monrreal100% (2)
- Set Wireless Router As Access PointDocument5 pagesSet Wireless Router As Access PointBill CaiNo ratings yet
- Siemens Contactor - Fuse CombinationDocument42 pagesSiemens Contactor - Fuse CombinationBill CaiNo ratings yet
- MiCOM Alstom P99x Brochure GBDocument8 pagesMiCOM Alstom P99x Brochure GBBill CaiNo ratings yet
- Secondary Injection TestingDocument5 pagesSecondary Injection Testing322399mk7086100% (3)
- Kenwood TH F6 F7 EnglishDocument64 pagesKenwood TH F6 F7 EnglishClodoaldo PasquiniNo ratings yet
- Selection of Current TrafoDocument18 pagesSelection of Current TrafoSuraj KumarNo ratings yet
- Practical Inrush Restraint-SetttingDocument12 pagesPractical Inrush Restraint-SetttingtunghtdNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Online Banking QuestionnaireDocument4 pagesOnline Banking QuestionnaireMukesh Arya100% (3)
- Catalogo Marmol Artificial - Kingkonree International China Surface Industrial Co., LTDDocument67 pagesCatalogo Marmol Artificial - Kingkonree International China Surface Industrial Co., LTDTDNRamonNo ratings yet
- IS 2062 Rev 2011Document10 pagesIS 2062 Rev 2011Ganesh LohakareNo ratings yet
- 1550 LNA1087404 LTE L11 Performance and Optimization PDFDocument3 pages1550 LNA1087404 LTE L11 Performance and Optimization PDFRiverNo ratings yet
- Phone CircuitsDocument24 pagesPhone CircuitsMike White100% (1)
- BS 5486-13Document24 pagesBS 5486-13Venugopalan Manaladikalam0% (1)
- Full Text 01Document83 pagesFull Text 01thierrylindoNo ratings yet
- An Application of SMED MethodologyDocument4 pagesAn Application of SMED MethodologyIng Raul OrozcoNo ratings yet
- Standard Pipe SupportsDocument73 pagesStandard Pipe SupportsSaad Ahmad Siddiqui100% (1)
- EPDP Overview Training For TeamsDocument186 pagesEPDP Overview Training For Teamsp.c abhishek50% (2)
- NASENI Announces Vacancies for Managing Directors of R&D InstitutesDocument14 pagesNASENI Announces Vacancies for Managing Directors of R&D InstitutesJoe EkanemNo ratings yet
- Guide to Cleaning Underground TanksDocument26 pagesGuide to Cleaning Underground TanksAhmed FodaNo ratings yet
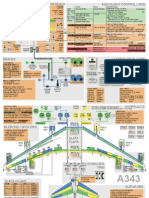
- Landing Gear / Nws Brakes: X F/CTL Altn Law (Prot Lost)Document1 pageLanding Gear / Nws Brakes: X F/CTL Altn Law (Prot Lost)Elias IruelaNo ratings yet
- Professional Overview Work History: Research InternDocument1 pageProfessional Overview Work History: Research InternAwanda PutraNo ratings yet
- Negotiation Skills For Project ManagersDocument137 pagesNegotiation Skills For Project Managersengr.s.a.malik6424100% (2)
- Insurance For Autonomous VehiclesDocument20 pagesInsurance For Autonomous Vehiclesssagr123No ratings yet
- OpenSAP A4h1 Week 4 Source CodeDocument21 pagesOpenSAP A4h1 Week 4 Source CodeSampath KumarNo ratings yet
- Fluid Filter Hydac (328 Pages)Document328 pagesFluid Filter Hydac (328 Pages)matjidiNo ratings yet
- Redundancy Pdu PDFDocument21 pagesRedundancy Pdu PDFPrem Singh MehtaNo ratings yet
- 7583 313435g Husky 1050 Graco EnglishDocument32 pages7583 313435g Husky 1050 Graco EnglishAgus YulfizarNo ratings yet
- Telescopic CylinderDocument4 pagesTelescopic Cylindergapc210% (1)
- TOCBooksDocument15 pagesTOCBooksinfaredmailmanNo ratings yet
- Quotation TejasDocument2 pagesQuotation TejasNedlloyd IndiaNo ratings yet
- Q2'20 UpdateDocument26 pagesQ2'20 UpdateFred Lamert100% (2)
- Funds ManagementDocument3 pagesFunds ManagementSowmyaNo ratings yet
- Check Valves (Amendments/Supplements To Bs 1868) : Technical SpecificationDocument11 pagesCheck Valves (Amendments/Supplements To Bs 1868) : Technical Specification윤규섭No ratings yet
- Moccu Agency PresentationDocument44 pagesMoccu Agency PresentationCameron BellingNo ratings yet
- 8+ Years Leading Innovation TeamsDocument4 pages8+ Years Leading Innovation TeamstrivenicatNo ratings yet
- Why Should My Conscience-1Document18 pagesWhy Should My Conscience-1gargrahul20004612No ratings yet
- Digital Weighing Indicator XK3190-A12 (E) : User ManualDocument17 pagesDigital Weighing Indicator XK3190-A12 (E) : User Manualiyol1No ratings yet