You might also like
- Passive Tuned Mass Damper For Seismic Protection: Septimiu-George Luca and Cristian PastiaDocument10 pagesPassive Tuned Mass Damper For Seismic Protection: Septimiu-George Luca and Cristian PastiaIngeniero Emmanuel RodriguezNo ratings yet
- CE 7014 Chap2 Part 2Document51 pagesCE 7014 Chap2 Part 2Anonymous ep7LE5ZdP5No ratings yet
- Estimating Parameters for Tuned Mass Dampers in Seismic ApplicationsDocument19 pagesEstimating Parameters for Tuned Mass Dampers in Seismic ApplicationsAfham AhmadNo ratings yet
- Seismic Performance of Tuned Mass DampersDocument9 pagesSeismic Performance of Tuned Mass DampersAfham AhmadNo ratings yet
- A Comparative Study Between Codes of Spectrum For A Single Degree of Freedom (SDOF) System in Two Different Hazardous RegionsDocument24 pagesA Comparative Study Between Codes of Spectrum For A Single Degree of Freedom (SDOF) System in Two Different Hazardous RegionsParvathy KrishnaNo ratings yet
- Optimal Tuning of Tuned Mass Dampers for Seismic Response ReductionDocument9 pagesOptimal Tuning of Tuned Mass Dampers for Seismic Response ReductionbutelcanecNo ratings yet
- CE 6705 Analysis & Design of Buildings Against Hazards: Professor T. BalendraDocument29 pagesCE 6705 Analysis & Design of Buildings Against Hazards: Professor T. BalendraThet Naing WinNo ratings yet
- Mode Acceleration Approach For Generation of Floor Spectra Including Soil-Structure InteractionDocument17 pagesMode Acceleration Approach For Generation of Floor Spectra Including Soil-Structure Interactionali_mirgozarNo ratings yet
- Control of Response of Structures With Passive and Active Tuned Mass DampersDocument14 pagesControl of Response of Structures With Passive and Active Tuned Mass DampersKoustav MajumdarNo ratings yet
- 1209 3169 1 SMDocument17 pages1209 3169 1 SMDina AvdićNo ratings yet
- Optimization of Tuned Mass Damper in Multistoried Buildings: Dinakara Akarsh P., Ronghe G.NDocument6 pagesOptimization of Tuned Mass Damper in Multistoried Buildings: Dinakara Akarsh P., Ronghe G.NDina AvdićNo ratings yet
- Footbridge 2008Document10 pagesFootbridge 2008jacquesdurstNo ratings yet
- Impact Vibration Control Using Semi-Active DamperDocument25 pagesImpact Vibration Control Using Semi-Active DamperVineesh KpNo ratings yet
- Effectiveness of Tuned Mass Damper in Damage Reduction of Building Under Far-Field Ground MotionsDocument12 pagesEffectiveness of Tuned Mass Damper in Damage Reduction of Building Under Far-Field Ground MotionsJohAny BustamanteNo ratings yet
- Two Degrees of Freedom PID Control for Active Vibration ReductionDocument9 pagesTwo Degrees of Freedom PID Control for Active Vibration ReductionndjedouiNo ratings yet
- Energy-Based Seismic Performance of Reinforced Concrete Frame StructuresDocument12 pagesEnergy-Based Seismic Performance of Reinforced Concrete Frame Structuresceyo ceyoNo ratings yet
- Investigation of Dynamic Behavior of Geosynthetic Reinforced Soil Retaining Structures Under Earthquake LoadsDocument41 pagesInvestigation of Dynamic Behavior of Geosynthetic Reinforced Soil Retaining Structures Under Earthquake LoadsIrawan TaniNo ratings yet
- Ch6 PDFDocument34 pagesCh6 PDFVennela VasupilliNo ratings yet
- A Modal Pushover Analysis Procedure For Estimating Seismic Demands For Buildings - ChopraDocument22 pagesA Modal Pushover Analysis Procedure For Estimating Seismic Demands For Buildings - Chopraredpol50% (2)
- Manolis KoliopoulosDocument58 pagesManolis KoliopoulosSushil MundelNo ratings yet
- Analysis and Simulation of The Ultrasonic/Sonic Driller/Corer (USDC)Document11 pagesAnalysis and Simulation of The Ultrasonic/Sonic Driller/Corer (USDC)syahrial_chaniago4769No ratings yet
- Effect of Gearbox Parameters on Housing VibrationsDocument6 pagesEffect of Gearbox Parameters on Housing VibrationsSh.nasirpurNo ratings yet
- Eurodyn MS07-291Document5 pagesEurodyn MS07-291laican7No ratings yet
- Geotechnical Earthquake Engineering: Dr. Deepankar ChoudhuryDocument18 pagesGeotechnical Earthquake Engineering: Dr. Deepankar ChoudhuryRaghavendra CNo ratings yet
- Full Paper For ICEEI 2007 (#D-11)Document5 pagesFull Paper For ICEEI 2007 (#D-11)Rudy SartinoNo ratings yet
- Full Paper For ICEEI 2007 (#D-11)Document5 pagesFull Paper For ICEEI 2007 (#D-11)Rudy SartinoNo ratings yet
- SEISMIC RESPONSEDocument80 pagesSEISMIC RESPONSErmm99rmm99No ratings yet
- Sdof 1211798306003307 8Document131 pagesSdof 1211798306003307 8AzTaurRivaiNo ratings yet
- Dynamic Response of Equipment in Structures With Consideration of Tuning Effect 1992Document9 pagesDynamic Response of Equipment in Structures With Consideration of Tuning Effect 1992ciscoNo ratings yet
- CM Hracov StanislavDocument2 pagesCM Hracov StanislavStanNo ratings yet
- Dynamic Response of Telecommunication Tower 1.2.1 Response To WindDocument6 pagesDynamic Response of Telecommunication Tower 1.2.1 Response To Windjerico habitanNo ratings yet
- Earthquake Engineering - CE 232 Quiz Time Allowed: 1 HourDocument9 pagesEarthquake Engineering - CE 232 Quiz Time Allowed: 1 HourKenny CantilaNo ratings yet
- Fyp-Ppt oDocument39 pagesFyp-Ppt oAnupam SonarNo ratings yet
- Nonlinear and Robust Control Schemes For Offshore Steel Jacket PlatformsDocument20 pagesNonlinear and Robust Control Schemes For Offshore Steel Jacket PlatformsBharathNo ratings yet
- Optimal Damping Constant of The Quarter Car Shock AbsorberDocument14 pagesOptimal Damping Constant of The Quarter Car Shock AbsorberUrvashi KhatriNo ratings yet
- Soil-Structure Interaction Including Nonlinear Soil: V. GicevDocument19 pagesSoil-Structure Interaction Including Nonlinear Soil: V. GicevRicardo Horacio LoreficeNo ratings yet
- Impact Vibration Control Using Semi-Active Damper: Presented by Vineesh K P 10ME63R38Document25 pagesImpact Vibration Control Using Semi-Active Damper: Presented by Vineesh K P 10ME63R38Vineesh KpNo ratings yet
- 09 - OscillationsDocument11 pages09 - Oscillationsfazeelm24No ratings yet
- Seismic Response Spectra - A Tool For Seismic Design of StructuresDocument6 pagesSeismic Response Spectra - A Tool For Seismic Design of StructuresMUNICIPALIDAD SERREZUELANo ratings yet
- Earthq Engng Struct Dyn - 1998 - Sadek - A Method of Estimating The Parameters of Tuned Mass Dampers For SeismicDocument19 pagesEarthq Engng Struct Dyn - 1998 - Sadek - A Method of Estimating The Parameters of Tuned Mass Dampers For Seismicvishal.patelNo ratings yet
- 107 1 NTU SDS 2 1 Fundamental PeriodDocument39 pages107 1 NTU SDS 2 1 Fundamental Period陳俊鴻No ratings yet
- Trifunac y Brandy 1 19Document19 pagesTrifunac y Brandy 1 19flaco perezNo ratings yet
- 1975 Trifunac and GradyDocument46 pages1975 Trifunac and GradyNESTOR GEDEON BELLIDO AÑANCANo ratings yet
- 14th World Conference Performance Based Seismic EvaluationDocument8 pages14th World Conference Performance Based Seismic EvaluationYasser Abdel AzeemNo ratings yet
- Theory of Response Spectrum AnalysisDocument13 pagesTheory of Response Spectrum Analysistailieuxaydung2019No ratings yet
- Vibration LooseningDocument24 pagesVibration LooseningAmir MoradiNo ratings yet
- Modal Space Sliding-Mode Control of Structures: Earthquake Engng. Struct. Dyn. 27, 1303-1314 (1998)Document12 pagesModal Space Sliding-Mode Control of Structures: Earthquake Engng. Struct. Dyn. 27, 1303-1314 (1998)pippoNo ratings yet
- 05 Chapter Earth QuakeDocument27 pages05 Chapter Earth QuakeRaghavendra CNo ratings yet
- Buried Pipes Response to Seismic and Soil VariabilityDocument8 pagesBuried Pipes Response to Seismic and Soil VariabilityBeh RangNo ratings yet
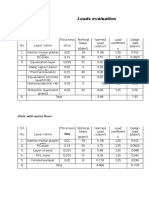
- Loads Evaluation: TerraceDocument9 pagesLoads Evaluation: Terraceandreeah37No ratings yet
- Soil Testing in The RC/TS Apparatus. Part 1Document13 pagesSoil Testing in The RC/TS Apparatus. Part 1м-р Горан ЈакимовскиNo ratings yet
- Fault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureFrom EverandFault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureMarion Y. ThomasNo ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- HW2 Group 3 SerenaDocument16 pagesHW2 Group 3 Serenasanh137No ratings yet
- HW2 Group 3 SerenaDocument16 pagesHW2 Group 3 Serenasanh137No ratings yet
- Sample Application LettersDocument3 pagesSample Application LettersMitchie GumeraNo ratings yet
- A Case Study of The Structural Responses of A Tall Building in Singapore Subjected To Close-In DetonationsDocument24 pagesA Case Study of The Structural Responses of A Tall Building in Singapore Subjected To Close-In Detonationssanh137No ratings yet
- Group 3 - FloridaDocument20 pagesGroup 3 - Floridasanh137No ratings yet
- Tall and Special Buildings: The Structural Design ofDocument2 pagesTall and Special Buildings: The Structural Design ofsanh137No ratings yet
- Chöông 7 - KEÁT CAÁU VAØ TÍNH TOAÙN COÄTDocument13 pagesChöông 7 - KEÁT CAÁU VAØ TÍNH TOAÙN COÄTsanh137No ratings yet
- HW2 Group 3 SerenaDocument16 pagesHW2 Group 3 Serenasanh137No ratings yet
- Course Enrollment SystemDocument2 pagesCourse Enrollment Systemsanh137No ratings yet
- CodeDocument3 pagesCodesanh137No ratings yet
- CC 2530Document36 pagesCC 2530sanh137No ratings yet
- Phu Luc Bao Cao Khao Sat Dia Chat Cong TrinhDocument508 pagesPhu Luc Bao Cao Khao Sat Dia Chat Cong Trinhsanh137No ratings yet
- 542 FTPDocument60 pages542 FTPsanh137No ratings yet
- 543 FTPDocument17 pages543 FTPsanh137No ratings yet
- 616 FTPDocument19 pages616 FTPsanh137No ratings yet
- Tall and Special Buildings: The Structural Design ofDocument2 pagesTall and Special Buildings: The Structural Design ofsanh137No ratings yet
- Progressive Collapse Resisting Capacity of Braced Frames: Jinkoo Kim, Youngho Lee and Hyunhoon ChoiDocument14 pagesProgressive Collapse Resisting Capacity of Braced Frames: Jinkoo Kim, Youngho Lee and Hyunhoon Choisanh137No ratings yet
- 698 FTPDocument2 pages698 FTPsanh137No ratings yet
- A Case Study of The Structural Responses of A Tall Building in Singapore Subjected To Close-In DetonationsDocument24 pagesA Case Study of The Structural Responses of A Tall Building in Singapore Subjected To Close-In Detonationssanh137No ratings yet
- 534 FTPDocument10 pages534 FTPsanh137No ratings yet
- 520 FTPDocument13 pages520 FTPsanh137No ratings yet
- 530 FTPDocument15 pages530 FTPsanh137No ratings yet
- 674 FTPDocument28 pages674 FTPsanh137No ratings yet
- 528 FTPDocument18 pages528 FTPsanh137No ratings yet
- 515 FTPDocument30 pages515 FTPsanh137No ratings yet
- Performance of Tall Buildings in Viña Del Mar in The 27 February 2010 Offshore Maule, Chile EarthquakeDocument20 pagesPerformance of Tall Buildings in Viña Del Mar in The 27 February 2010 Offshore Maule, Chile Earthquakesanh137No ratings yet
- 522 FTPDocument13 pages522 FTPsanh137No ratings yet
- 679 FTPDocument19 pages679 FTPsanh137No ratings yet
- 675 FTPDocument16 pages675 FTPsanh137No ratings yet
- Geometallurgical Modelling - A Mineral Processor's PerspectiveDocument2 pagesGeometallurgical Modelling - A Mineral Processor's PerspectiveAlexandra de la CadenaNo ratings yet
- Marshmallow LabDocument3 pagesMarshmallow Labapi-254428474No ratings yet
- Geomechanic Application For Hydraulic Fracturing in Lower Pematang Formation, Central Sumatra BasinDocument7 pagesGeomechanic Application For Hydraulic Fracturing in Lower Pematang Formation, Central Sumatra Basinnabella nurul fitriNo ratings yet
- UG Intake by Programme 2015 16 To 2018 2019Document8 pagesUG Intake by Programme 2015 16 To 2018 2019Parth ModiNo ratings yet
- Coarse and Fine Aggregates: Future of KeralaDocument11 pagesCoarse and Fine Aggregates: Future of KeralaDrThrivikramji KythNo ratings yet
- Filipino ChemistDocument10 pagesFilipino ChemistNevely98% (109)
- Stream Sediment Geochemical Mapping of The Mount Pinatubo-Dizon Mine Area, The Philippines Implications For Mineral Exploration and Environmental RiskDocument18 pagesStream Sediment Geochemical Mapping of The Mount Pinatubo-Dizon Mine Area, The Philippines Implications For Mineral Exploration and Environmental RiskKristopanus Patiung LantemonaNo ratings yet
- Intelligence Theory and Education: Planets' Role in Different Types of IntelligenceDocument8 pagesIntelligence Theory and Education: Planets' Role in Different Types of IntelligencePratyushAgarwal100% (1)
- Broad Form DeedDocument3 pagesBroad Form DeedWesley KuemmelNo ratings yet
- The Boneyard Project Year 2 2013 2Document3 pagesThe Boneyard Project Year 2 2013 2api-258990534No ratings yet
- For The Beauty of The EarthDocument4 pagesFor The Beauty of The EarthGi67% (3)
- Chapter 4 Rock MassDocument26 pagesChapter 4 Rock MassAzreenoor AtieqahNo ratings yet
- Geotechnical Investigations and Report General Purpose: TCE Consulting Engineers LimitedDocument38 pagesGeotechnical Investigations and Report General Purpose: TCE Consulting Engineers Limitedksshashidhar100% (1)
- SUMMATIVE TEST NO 1 Astronomical PhenomenaDocument2 pagesSUMMATIVE TEST NO 1 Astronomical PhenomenaGeri Isabel TampusNo ratings yet
- The Wiltshire Lamb, Gosport, HampshireDocument15 pagesThe Wiltshire Lamb, Gosport, HampshireWessex ArchaeologyNo ratings yet
- Keep It Simple Science Photocopy Master Sheets: AstronomyDocument21 pagesKeep It Simple Science Photocopy Master Sheets: AstronomyFlaaffyNo ratings yet
- Lucia 1995 Rock-FabricPetrophysical Classification of Carbonate Pore SpaceDocument26 pagesLucia 1995 Rock-FabricPetrophysical Classification of Carbonate Pore SpaceMarcos Antonio Romero Arteaga100% (1)
- Cosmic Wheel and TetrahedronDocument2 pagesCosmic Wheel and TetrahedronAtazothnashaas100% (1)
- Handouts For Ancient ScienceDocument9 pagesHandouts For Ancient ScienceGen ArnistoNo ratings yet
- Daftar Pustaka GeologiDocument2 pagesDaftar Pustaka GeologiAbdul Aziz SlametNo ratings yet
- New Residence: Design Review BoardDocument45 pagesNew Residence: Design Review BoardNone None None67% (3)
- Practice Test: B C D B C Caused Cancer in Laboratory Rats. DDocument5 pagesPractice Test: B C D B C Caused Cancer in Laboratory Rats. DNguyen CuongNo ratings yet
- H.T. Madondo Final Attachment ReportDocument70 pagesH.T. Madondo Final Attachment Reporttkubvos100% (1)
- (Episteme 7) Roberto Torretti (Auth.) - Philosophy of Geometry From Riemann To Poincaré-Springer Netherlands (1978)Document472 pages(Episteme 7) Roberto Torretti (Auth.) - Philosophy of Geometry From Riemann To Poincaré-Springer Netherlands (1978)Mário Raia NetoNo ratings yet
- Planetary Dignities and RelationshipsDocument9 pagesPlanetary Dignities and RelationshipsSaurav ChakrabortyNo ratings yet
- 718333-QP - Scientific Truths in The QuranDocument52 pages718333-QP - Scientific Truths in The QuranINFOPARK CSCNo ratings yet
- 5e Flower Dissection Investigation - Spring 2016Document3 pages5e Flower Dissection Investigation - Spring 2016api-309653899No ratings yet
- #Orchids, Their Structure, PDFDocument136 pages#Orchids, Their Structure, PDFMick Talbot100% (1)
- Wonderfallfinal 2Document10 pagesWonderfallfinal 2api-273595156No ratings yet
- Personal Statement of Mohammed Imad Eddine Alliouche PDFDocument2 pagesPersonal Statement of Mohammed Imad Eddine Alliouche PDFImad AllioucheNo ratings yet