You might also like
- Present perfect and past tense guideDocument3 pagesPresent perfect and past tense guideBrenda Naranjo MorenoNo ratings yet
- Unit 2. Presen SimlpleDocument4 pagesUnit 2. Presen SimlpleBrenda Naranjo MorenoNo ratings yet
- Unit 2. Presen SimlpleDocument4 pagesUnit 2. Presen SimlpleBrenda Naranjo MorenoNo ratings yet
- Unit 13-Blue BookDocument6 pagesUnit 13-Blue BookBrenda Naranjo MorenoNo ratings yet
- INSTAGRAMDocument1 pageINSTAGRAMBrenda Naranjo MorenoNo ratings yet
- UNIT 48 Reported Speech 2Document4 pagesUNIT 48 Reported Speech 2Brenda Naranjo MorenoNo ratings yet
- UNIT 53 Verb-IngDocument4 pagesUNIT 53 Verb-IngBrenda Naranjo MorenoNo ratings yet
- Unit 31 Must and CanDocument3 pagesUnit 31 Must and CanBrenda Naranjo MorenoNo ratings yet
- Do you know where questions and reported questionsDocument4 pagesDo you know where questions and reported questionsBrenda Naranjo MorenoNo ratings yet
- UNIT 51 to ... (I want to do) and –ing (I enjoy doingDocument2 pagesUNIT 51 to ... (I want to do) and –ing (I enjoy doingBrenda Naranjo MorenoNo ratings yet
- Do you know where questions and reported questionsDocument4 pagesDo you know where questions and reported questionsBrenda Naranjo MorenoNo ratings yet
- Unit 51auxiliary VerbDocument2 pagesUnit 51auxiliary VerbBrenda Naranjo MorenoNo ratings yet
- Cortocircuito GeneradoresDocument4 pagesCortocircuito GeneradoresBrenda Naranjo MorenoNo ratings yet
- Dear KarenDocument2 pagesDear KarenBrenda Naranjo MorenoNo ratings yet
- UNIT 53 Verb-IngDocument4 pagesUNIT 53 Verb-IngBrenda Naranjo MorenoNo ratings yet
- 20Document1 page20Brenda Naranjo MorenoNo ratings yet
- Unit 45 BLUE BOOKDocument2 pagesUnit 45 BLUE BOOKBrenda Naranjo MorenoNo ratings yet
- 20Document1 page20Brenda Naranjo MorenoNo ratings yet
- Current vs Time for Power DevicesDocument1 pageCurrent vs Time for Power DevicesBrenda Naranjo MorenoNo ratings yet
- Exercises Unit 49Document4 pagesExercises Unit 49Brenda Naranjo MorenoNo ratings yet
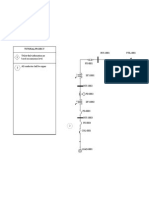
- 1line001 DRWDocument1 page1line001 DRWBrenda Naranjo MorenoNo ratings yet
- Somebody Will Clean The Room LaterDocument6 pagesSomebody Will Clean The Room LaterBrenda Naranjo MorenoNo ratings yet
- Current in Amperes: PD-0003 PD-0003Document1 pageCurrent in Amperes: PD-0003 PD-0003Brenda Naranjo MorenoNo ratings yet
- Present perfect and past tense guideDocument3 pagesPresent perfect and past tense guideBrenda Naranjo MorenoNo ratings yet
- Circuit Breaker TimeDocument6 pagesCircuit Breaker TimeBrenda Naranjo MorenoNo ratings yet
- Unit 9Document8 pagesUnit 9Brenda Naranjo Moreno100% (6)
- TCC2 2Document1 pageTCC2 2Brenda Naranjo MorenoNo ratings yet
- Present perfect and past tense guideDocument3 pagesPresent perfect and past tense guideBrenda Naranjo MorenoNo ratings yet
- Supplementary ExercisesDocument30 pagesSupplementary ExercisesBrenda Naranjo Moreno33% (3)
- Unit 2. Presen SimlpleDocument4 pagesUnit 2. Presen SimlpleBrenda Naranjo MorenoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter 4. Problem SM.4 - Toluene/Ethylbenzene Column BackgroundDocument11 pagesChapter 4. Problem SM.4 - Toluene/Ethylbenzene Column BackgroundBashar JawadNo ratings yet
- General CatalogueDocument171 pagesGeneral CatalogueHarsha Vardhan BNo ratings yet
- India 2030 - Exploring The FutureDocument32 pagesIndia 2030 - Exploring The FutureAloka MajumderNo ratings yet
- FlowServe CorporationDocument10 pagesFlowServe CorporationraghavaneieNo ratings yet
- Macroeconomics Report Consumption and SavingDocument8 pagesMacroeconomics Report Consumption and SavingRonibe B MalinginNo ratings yet
- From Aspiration To Reality: Unpacking The Africa Mining VisionDocument40 pagesFrom Aspiration To Reality: Unpacking The Africa Mining VisionOxfamNo ratings yet
- New Generation PlanningDocument4 pagesNew Generation PlanningBadhan HasanNo ratings yet
- SESCOM - Trade Show PresentationDocument2 pagesSESCOM - Trade Show PresentationJeremia NindaNo ratings yet
- Brochure Smart Cities ForwebDocument13 pagesBrochure Smart Cities ForwebAlexandra DumitrescuNo ratings yet
- Sabah and Labuan Grid Code 2011 - mv1.0Document170 pagesSabah and Labuan Grid Code 2011 - mv1.0Syam NeoNo ratings yet
- Demand Side ManagementDocument22 pagesDemand Side ManagementAbhishek SoodNo ratings yet
- DumperDocument14 pagesDumperAnvReañosVna100% (1)
- Energy and Sustainable Development in NigeriaDocument36 pagesEnergy and Sustainable Development in NigeriaLambert Dafom NuhuNo ratings yet
- Price-Fixing is Normal in Industrial EconomiesDocument10 pagesPrice-Fixing is Normal in Industrial EconomieseriNo ratings yet
- Ground Fault Protection and Coordination in Industrial and Commercial Power SystemsDocument46 pagesGround Fault Protection and Coordination in Industrial and Commercial Power Systemsgerrzen64100% (1)
- SVC PLUS The Efficient WayDocument8 pagesSVC PLUS The Efficient WayPushkarEENo ratings yet
- ESP Diagnostic With ExercisesDocument28 pagesESP Diagnostic With ExercisesReza RamadhanNo ratings yet
- 12 5 16 MVA Power Transformer Data Sheet PDFDocument5 pages12 5 16 MVA Power Transformer Data Sheet PDFajaymannNo ratings yet
- Shale CPDocument2 pagesShale CPDylanNo ratings yet
- SPE Java Newsletter Sep Dec2016Document56 pagesSPE Java Newsletter Sep Dec2016Faustina MarthaNo ratings yet
- Biofuels and Bioproducts From Wet and Gaseous Waste Streams Full Report PDFDocument128 pagesBiofuels and Bioproducts From Wet and Gaseous Waste Streams Full Report PDFzaedmohdNo ratings yet
- Capacitors Switchgear and Control Panel Manufacturing UnitDocument19 pagesCapacitors Switchgear and Control Panel Manufacturing UnitAkshay PatelNo ratings yet
- ALL AMN ALL en 1812 ALL Newsletter11 CAGIDatasheetDocument10 pagesALL AMN ALL en 1812 ALL Newsletter11 CAGIDatasheetCursed RonyNo ratings yet
- Senior Welding QC Engineer Targeting Oil & Gas ProjectsDocument3 pagesSenior Welding QC Engineer Targeting Oil & Gas ProjectsTauqeer SalimNo ratings yet
- Introduction To en 16001Document7 pagesIntroduction To en 16001IndrajeetdNo ratings yet
- Guide To Greener Electronics 18th Edition (November 2012)Document65 pagesGuide To Greener Electronics 18th Edition (November 2012)Michael OsinaNo ratings yet
- Pig SignalDocument4 pagesPig SignalDenstar Ricardo SilalahiNo ratings yet
- The Africa EnigmaDocument10 pagesThe Africa EnigmaIMANI Center for Policy and EducationNo ratings yet
- H5 BrochureDocument4 pagesH5 Brochurekrlittle4dNo ratings yet
- Current Affairs May Questions & Answers PDF 2016 PDFDocument26 pagesCurrent Affairs May Questions & Answers PDF 2016 PDFSamadarshi PaulNo ratings yet