You might also like
- Engineering MECHANICS analyzes torsion of non-circular barsDocument16 pagesEngineering MECHANICS analyzes torsion of non-circular barsPREM KUMARNo ratings yet
- IFEM Ch00Document38 pagesIFEM Ch00Yusuf YamanerNo ratings yet
- Intro To FemDocument28 pagesIntro To FemcNo ratings yet
- Numerical Grid GenerationDocument336 pagesNumerical Grid Generationjiandong3600100% (2)
- Review PDFDocument200 pagesReview PDFbenicilloNo ratings yet
- Numerical Methods For Large Eigenvalue ProblemsDocument285 pagesNumerical Methods For Large Eigenvalue ProblemsQuinton Boltin100% (1)
- Advance Numerical AnalysisDocument133 pagesAdvance Numerical AnalysisRavi ShankarNo ratings yet
- Introduction to FEMDocument51 pagesIntroduction to FEMJeetender Singh KushawahaNo ratings yet
- A Finite Element Formulation For Nonlinear Incompressible Elastic and Inelastic AnalysisDocument53 pagesA Finite Element Formulation For Nonlinear Incompressible Elastic and Inelastic Analysisguanicad712827No ratings yet
- FEM ReferencesDocument26 pagesFEM ReferencesephNo ratings yet
- FEM Lecture Notes Liu UCDocument188 pagesFEM Lecture Notes Liu UCsujan_duttaNo ratings yet
- J.B. Institute of Engineering and Technology: Course Code: C322 Finite Element MethodDocument82 pagesJ.B. Institute of Engineering and Technology: Course Code: C322 Finite Element MethodGopinath GangadhariNo ratings yet
- Finite Element Analysis: Dr. Latha NagendranDocument91 pagesFinite Element Analysis: Dr. Latha NagendranPopularCollectionClipsNo ratings yet
- Practical FEA OverviewDocument37 pagesPractical FEA OverviewPavan Kumar VinjanampatiNo ratings yet
- Finite Element Method: Mechanical Engineering DepartmentDocument27 pagesFinite Element Method: Mechanical Engineering DepartmentmNo ratings yet
- MWR Galerkin FemDocument64 pagesMWR Galerkin FemTharshan Rajasekar100% (1)
- Finite Element Method An Overview PDFDocument8 pagesFinite Element Method An Overview PDFMuller AsmareNo ratings yet
- Approximate Methods - Weighted Residual MethodsDocument30 pagesApproximate Methods - Weighted Residual MethodsMohammad Tawfik100% (2)
- Introduction About Finite Element AnalysisDocument19 pagesIntroduction About Finite Element AnalysisSabareeswaran MurugesanNo ratings yet
- CFD LectureDocument82 pagesCFD LectureLong DoanNo ratings yet
- UMAT Theory - Nader Abedrabbo, PH.DDocument2 pagesUMAT Theory - Nader Abedrabbo, PH.DSebastiao SilvaNo ratings yet
- John H. S. Lee-The Gas Dynamics of Explosions-Cambridge University Press (2016)Document218 pagesJohn H. S. Lee-The Gas Dynamics of Explosions-Cambridge University Press (2016)Luis Felipe Gutierrez MarcantoniNo ratings yet
- Finite Element AnalysisDocument34 pagesFinite Element Analysisramamoorthy2587No ratings yet
- Basic Floquet Theory ChapterDocument40 pagesBasic Floquet Theory ChapterThalia JuarezNo ratings yet
- NFEM Ch01 PDFDocument15 pagesNFEM Ch01 PDFmadhuNo ratings yet
- New Finite Element Analysis Lec1Document35 pagesNew Finite Element Analysis Lec1BookMaggotNo ratings yet
- Modal CorrelationDocument53 pagesModal CorrelationDasaka BrahmendraNo ratings yet
- Cantilever Beam TutorialDocument7 pagesCantilever Beam TutorialMohammad Ahmad GharaibehNo ratings yet
- MTech Semester I Exam Questions on Elasticity and PlasticityDocument2 pagesMTech Semester I Exam Questions on Elasticity and PlasticityNaren GujjarNo ratings yet
- The Finite Strain Johnson Cook Plasticity and Damage Constitutive Model in AlegraDocument52 pagesThe Finite Strain Johnson Cook Plasticity and Damage Constitutive Model in AlegraOumeyma HamlauiNo ratings yet
- What Is Finite Element AnalysisDocument18 pagesWhat Is Finite Element AnalysisNo ShieelaNo ratings yet
- Finite Element For Heat Transfer: AnalysisDocument204 pagesFinite Element For Heat Transfer: Analysisvigia41100% (1)
- Simulation of explosive impact design with LS-DYNADocument8 pagesSimulation of explosive impact design with LS-DYNAheltaherNo ratings yet
- Finite Element Analysis: Presented by J.Sai GaneshDocument7 pagesFinite Element Analysis: Presented by J.Sai GaneshSai Ganesh JayakaranNo ratings yet
- Advanced Mechanics of MaterialsDocument2 pagesAdvanced Mechanics of MaterialsShubham BhagwatNo ratings yet
- Solution To Engineering Problems Using Finite Element MethodDocument39 pagesSolution To Engineering Problems Using Finite Element Methodahmet mehmetNo ratings yet
- Applied Mechanics of Solids: An Introduction to the Mechanics of Elastic and Plastic DeformationDocument18 pagesApplied Mechanics of Solids: An Introduction to the Mechanics of Elastic and Plastic DeformationHunny GuptaNo ratings yet
- Evaluation of The Non-Linear Fracture Parameters J and C With ANSYSDocument11 pagesEvaluation of The Non-Linear Fracture Parameters J and C With ANSYSPeti KovácsNo ratings yet
- Navier - Stokes Equation PDFDocument10 pagesNavier - Stokes Equation PDFanagha sreenivasamNo ratings yet
- The University of Edinburgh Dynamical Systems Problem SetDocument4 pagesThe University of Edinburgh Dynamical Systems Problem SetHaaziquah TahirNo ratings yet
- Topology Optimization For Shell Structures With Linear Buckling ResponsesDocument6 pagesTopology Optimization For Shell Structures With Linear Buckling ResponsesAltairEnlighten100% (1)
- Partial Differential Equations 2Document134 pagesPartial Differential Equations 2bstockus100% (1)
- Determining Stress Intensity Factors Analytically and NumericallyDocument50 pagesDetermining Stress Intensity Factors Analytically and NumericallyAdnen Laamouri100% (1)
- Solitons IntroDocument8 pagesSolitons Intromexicanu99No ratings yet
- Continuum MechanicsDocument10 pagesContinuum Mechanicschristophe100% (1)
- Chapter 7 - FEMDocument34 pagesChapter 7 - FEMpaivensolidsnake100% (1)
- STAR CCM Design Manager Spotlight PDFDocument69 pagesSTAR CCM Design Manager Spotlight PDFAbimaelNo ratings yet
- Fracture Mechanics Lecture Notes on Theory and ApplicationsDocument137 pagesFracture Mechanics Lecture Notes on Theory and ApplicationsElias Kapa100% (1)
- Finite Element AnalysisDocument3 pagesFinite Element AnalysisAndreia MenesesNo ratings yet
- Autodyn New FeaturesDocument68 pagesAutodyn New Featurespushkarajsherkar100% (1)
- Advanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdDocument8 pagesAdvanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdChaitanya RamNo ratings yet
- Elasto-Plastic and Damage Modeling of Reinforced ConcreteDocument173 pagesElasto-Plastic and Damage Modeling of Reinforced Concreterodrigo93_vgNo ratings yet
- IterMethBook 2nded PDFDocument567 pagesIterMethBook 2nded PDF甘逸凱No ratings yet
- Femap UputstvoDocument66 pagesFemap Uputstvodakiza019-1No ratings yet
- FEAP Theory ManualDocument160 pagesFEAP Theory ManualengenheirovitorNo ratings yet
- Nptel: Aero Elasticity - Video CourseDocument2 pagesNptel: Aero Elasticity - Video CourseMarin PerićNo ratings yet
- Analytical Solution of A Cubic EquationDocument3 pagesAnalytical Solution of A Cubic EquationaskarnabNo ratings yet
- Matlab Report1Document2 pagesMatlab Report1Samy MohamedNo ratings yet
- Periodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsFrom EverandPeriodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsNo ratings yet
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsFrom EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorNo ratings yet
- DTSB5Document6 pagesDTSB5pgkaeroNo ratings yet
- HyperMesh Geometry CleanupDocument8 pagesHyperMesh Geometry Cleanupvijendra_1893No ratings yet
- InterviewDocument15 pagesInterviewpgkaeroNo ratings yet
- Lecture 6Document96 pagesLecture 6pgkaeroNo ratings yet
- Isentropic Flow Through Varying Area DuctDocument9 pagesIsentropic Flow Through Varying Area DuctpgkaeroNo ratings yet
- Vijay 4exp 3 IDocument3 pagesVijay 4exp 3 IpgkaeroNo ratings yet
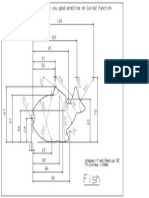
- Fish Catia ModelDocument1 pageFish Catia ModelpgkaeroNo ratings yet
- NozzlDocument1 pageNozzlpgkaeroNo ratings yet
- Mtech Mech (1) MJNDocument70 pagesMtech Mech (1) MJNpgkaeroNo ratings yet
- Question Bank: AE1254 - PROPULSION IDocument8 pagesQuestion Bank: AE1254 - PROPULSION ISêlvâkûmâr JayabalaNo ratings yet
- Fea 2MDocument13 pagesFea 2MSubharanjani MathiNo ratings yet
- ME2353 Finite Element Analysis Lecture NotesDocument34 pagesME2353 Finite Element Analysis Lecture Notespgkaero100% (2)
- Finite Element AnalysisDocument3 pagesFinite Element AnalysispgkaeroNo ratings yet
- Finite Element Method Two MarksDocument33 pagesFinite Element Method Two Markspgkaero100% (1)
- Finite Element Method Two MarksDocument33 pagesFinite Element Method Two Markspgkaero100% (1)
- Phy QuotationDocument2 pagesPhy Quotationpgkaero100% (1)
- 3 and 4 Unit Propulsion2 Problems PDFDocument8 pages3 and 4 Unit Propulsion2 Problems PDFpgkaeroNo ratings yet
- Propulsion 2 Solved ProblemsDocument19 pagesPropulsion 2 Solved ProblemspgkaeroNo ratings yet
- Aerodynamics Lab Manual (PCT)Document17 pagesAerodynamics Lab Manual (PCT)pgkaeroNo ratings yet
- Aerodynamics Lab Manual (PCT)Document21 pagesAerodynamics Lab Manual (PCT)pgkaero80% (5)
- Aerodynamics Lab Manual (PCT)Document21 pagesAerodynamics Lab Manual (PCT)pgkaero80% (5)
- How Motorcycle Exhaust Pipes Are Made & Materials NeededDocument8 pagesHow Motorcycle Exhaust Pipes Are Made & Materials NeededRidzuan JazlanNo ratings yet
- PW-5 Ultrasonic Stud WeldingDocument4 pagesPW-5 Ultrasonic Stud WeldingAMB SpainNo ratings yet
- Load Rating Training Hand Calculations: Tim Keller, PE Amjad Waheed, PEDocument35 pagesLoad Rating Training Hand Calculations: Tim Keller, PE Amjad Waheed, PEDaniel Rojas CisnerosNo ratings yet
- BCS WS QS LMSW 105 23272r2Document8 pagesBCS WS QS LMSW 105 23272r2ddNo ratings yet
- Price ListDocument8 pagesPrice ListKausik GhoshNo ratings yet
- Quotation Chiller 21-4-4mDocument2 pagesQuotation Chiller 21-4-4mMuharram SeptionoNo ratings yet
- Laterite StoneDocument3 pagesLaterite StoneIndraja Rm100% (1)
- Conplast F292Document4 pagesConplast F292Mohammed AdilNo ratings yet
- Kick-Off Meeting - Pipe CulvertsDocument12 pagesKick-Off Meeting - Pipe CulvertsShabbar Abbas MalikNo ratings yet
- Painting Breakdown Surface AreaDocument6 pagesPainting Breakdown Surface AreaMohd FadzleNo ratings yet
- Define Soil Stabilization?: UN IT - 5 ST Abi Liz Atio NDocument5 pagesDefine Soil Stabilization?: UN IT - 5 ST Abi Liz Atio Nhimabindugvsd71No ratings yet
- Fire Exit Railing DetailsDocument1 pageFire Exit Railing DetailsRenz ChuaNo ratings yet
- CBM Catlog Revised 18 04 PDF (Final)Document19 pagesCBM Catlog Revised 18 04 PDF (Final)Muhammad Najam AbbasNo ratings yet
- Fire Tube Boilers PDFDocument16 pagesFire Tube Boilers PDFG.SWAMI67% (3)
- DAIKIN Error CodesDocument3 pagesDAIKIN Error Codesmazlie mazlanNo ratings yet
- Sandip Institute ME Dept MCQ on Advanced Manufacturing ProcessesDocument109 pagesSandip Institute ME Dept MCQ on Advanced Manufacturing ProcessesMudassir KhanNo ratings yet
- EBPlateDocument8 pagesEBPlateLeonardo BalocchiNo ratings yet
- Expandafoam TDSDocument2 pagesExpandafoam TDSkhraieric16No ratings yet
- Central Air Conditioning SystemDocument5 pagesCentral Air Conditioning SystemRUSHALI SRIVASTAVANo ratings yet
- 04 40 Masonry - Catalogue - Nelissen Handmoulded Facing BrickDocument35 pages04 40 Masonry - Catalogue - Nelissen Handmoulded Facing BrickKH LeeNo ratings yet
- Hot and cold water faucet fixture with adjustable valvesDocument6 pagesHot and cold water faucet fixture with adjustable valvesmarlondijiNo ratings yet
- Juntas EnchaquetadasDocument1 pageJuntas EnchaquetadasPablo PasqualiniNo ratings yet
- ASME Standard List of Piping and FittingsDocument7 pagesASME Standard List of Piping and Fittingsjuantamad02No ratings yet
- Jockey Pump 96517052 - CR - 520 - AFGJAEHQQEDocument8 pagesJockey Pump 96517052 - CR - 520 - AFGJAEHQQEShafa AlmaliyaNo ratings yet
- TDS - RheoFIT 726 PDFDocument2 pagesTDS - RheoFIT 726 PDFAlexi ALfred H. TagoNo ratings yet
- Tiles, Marble, Granite Work Schedule of Rates (Revised) With ICS - 2022Document10 pagesTiles, Marble, Granite Work Schedule of Rates (Revised) With ICS - 2022ecobuildconstructionltdNo ratings yet
- High production carding machine systemDocument1 pageHigh production carding machine systemJ.SathishNo ratings yet
- 5 & 6 UnitsDocument46 pages5 & 6 UnitsCH TEJA KIRANNo ratings yet
- Sikagrout - 4 UwDocument3 pagesSikagrout - 4 UwTanveer Hussain ButtNo ratings yet
- Cement Class 12 ChemistryDocument11 pagesCement Class 12 ChemistryRohit JaiswalNo ratings yet