You might also like
- Digital Modulations using MatlabFrom EverandDigital Modulations using MatlabRating: 4 out of 5 stars4/5 (6)
- Advanced GPS Signal Acquisition: Viktor PrzebindaDocument8 pagesAdvanced GPS Signal Acquisition: Viktor PrzebindaJessica SmithNo ratings yet
- FFT128 ProjectDocument70 pagesFFT128 ProjectBảo Ngọc LêNo ratings yet
- 1975 Number Theoretic Transforms To Implement Fast Digital ConvolutionDocument11 pages1975 Number Theoretic Transforms To Implement Fast Digital ConvolutionRajesh BathijaNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument5 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- On-Chip Implementation of High Speed and High Resolution Pipeline Radix 2 FFT AlgorithmDocument3 pagesOn-Chip Implementation of High Speed and High Resolution Pipeline Radix 2 FFT AlgorithmDr. Rozita teymourzadeh, CEng.No ratings yet
- Hardware Implementation Low Power High Speed FFT CoreDocument7 pagesHardware Implementation Low Power High Speed FFT CoreAndrew TheKanenasNo ratings yet
- Vlsi Architecture For r2b r4b r8bDocument81 pagesVlsi Architecture For r2b r4b r8bvsangvai26No ratings yet
- PTFFT 2Document6 pagesPTFFT 2obula863No ratings yet
- Implementation of Efficient 64-Point FFT/IFFT Block For OFDM Transreciever of IEEE 802.11aDocument6 pagesImplementation of Efficient 64-Point FFT/IFFT Block For OFDM Transreciever of IEEE 802.11aInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 12 - Chepter 5Document11 pages12 - Chepter 5KhaireddineNo ratings yet
- VHDL Implementation of FFT/IFFT Blocks For OFDM: Pawan Verma Harpreet Kaur Mandeep Singh Balwinder SinghDocument3 pagesVHDL Implementation of FFT/IFFT Blocks For OFDM: Pawan Verma Harpreet Kaur Mandeep Singh Balwinder SinghParamesh WaranNo ratings yet
- Design and Implementation of An Optimized Double Precision Floating Point Divider On FPGADocument8 pagesDesign and Implementation of An Optimized Double Precision Floating Point Divider On FPGAPrathyusha DileepNo ratings yet
- VLSI Implementation of Pipelined Fast Fourier TransformDocument6 pagesVLSI Implementation of Pipelined Fast Fourier TransformIjarcet JournalNo ratings yet
- On-Chip Implementation of High Resolution High Speed Low Area Floating Point AdderSubtractor With Reducing Mean Latency For OFDM ApplicationsDocument6 pagesOn-Chip Implementation of High Resolution High Speed Low Area Floating Point AdderSubtractor With Reducing Mean Latency For OFDM ApplicationsDr. Rozita teymourzadeh, CEng.No ratings yet
- A 64 Point Fourier Transform ChipDocument21 pagesA 64 Point Fourier Transform ChipBibinMathewNo ratings yet
- Efficient FPGA Implementation of FFT/IFFT Processor: Ahmed Saeed, M. Elbably, G. Abdelfadeel, and M. I. EladawyDocument8 pagesEfficient FPGA Implementation of FFT/IFFT Processor: Ahmed Saeed, M. Elbably, G. Abdelfadeel, and M. I. Eladawyfadhil78No ratings yet
- 5 Ofdm: 5.1 Overview About An OFDM SystemDocument9 pages5 Ofdm: 5.1 Overview About An OFDM SystemThehieu DangNo ratings yet
- Mapping The SISO Module of The Turbo Decoder To A FPFADocument8 pagesMapping The SISO Module of The Turbo Decoder To A FPFAAnonymous 9ksuyYy34PNo ratings yet
- FFTDocument4 pagesFFTJasim ArNo ratings yet
- Design and Implementation of Pipelined FFT Processor: D.Venkata Kishore, C.Ram KumarDocument4 pagesDesign and Implementation of Pipelined FFT Processor: D.Venkata Kishore, C.Ram KumarShakeel RanaNo ratings yet
- VHDL Implementation of A Flexible and Synthesizable FFT ProcessorDocument5 pagesVHDL Implementation of A Flexible and Synthesizable FFT ProcessorHarrySchrovskiNo ratings yet
- Two Step Binary LogDocument5 pagesTwo Step Binary LogVenkatram PavanNo ratings yet
- A Memory-Based FFT Processor Design With Generalized Efficient Conflict-Free Address SchemesDocument11 pagesA Memory-Based FFT Processor Design With Generalized Efficient Conflict-Free Address Schemessai haritha kavuluruNo ratings yet
- Comparative Study of Various FFT Algorithm Implementation On FPGADocument4 pagesComparative Study of Various FFT Algorithm Implementation On FPGAInternational Journal of Emerging Trends in Signal Processing (IJETSP)No ratings yet
- Implementation of Fast Fourier Transform (FFT) On FPGA Using Verilog HDLDocument21 pagesImplementation of Fast Fourier Transform (FFT) On FPGA Using Verilog HDLNikitaPrabhu0% (1)
- OFDM Simulation EE810Document18 pagesOFDM Simulation EE810Ashique Mahmood100% (1)
- Design of An Efficient FFT Processor For OFDM Systems: Haining Jiang, Hanwen Luo, Jifeng Tian and Wentao SongDocument5 pagesDesign of An Efficient FFT Processor For OFDM Systems: Haining Jiang, Hanwen Luo, Jifeng Tian and Wentao SongJana Bhaskar RaoNo ratings yet
- PSD Computation Using Modified Welch AlgorithmDocument4 pagesPSD Computation Using Modified Welch AlgorithmijsretNo ratings yet
- A Matrix-Multiply Unit For Posits in Reconfigurable Logic Leveraging (Open) CAPIDocument9 pagesA Matrix-Multiply Unit For Posits in Reconfigurable Logic Leveraging (Open) CAPImuhammad zeeshanNo ratings yet
- Base Paper FPR FFTDocument5 pagesBase Paper FPR FFTOleti GowthamiNo ratings yet
- FFT Ifft Block Floating PointDocument7 pagesFFT Ifft Block Floating PointpeusalatNo ratings yet
- Color Bayer CFA Image Compression Using Adaptive Lifting Scheme and SPIHT With Huffman CodingDocument5 pagesColor Bayer CFA Image Compression Using Adaptive Lifting Scheme and SPIHT With Huffman CodingPanjieNo ratings yet
- Performance Analysis of OFDM For Different Modulation TechniquesDocument6 pagesPerformance Analysis of OFDM For Different Modulation Techniquesrahman08413No ratings yet
- SSRN-id3869494Document5 pagesSSRN-id3869494Prabhu SNo ratings yet
- Choosing FFTs for ADSP-21xx processorsDocument3 pagesChoosing FFTs for ADSP-21xx processorsRaghu KodiNo ratings yet
- DIT Radix-2Document7 pagesDIT Radix-2Suha NoriNo ratings yet
- Real-Time Partitioned Convolution For Ambiophonics Surround SoundDocument4 pagesReal-Time Partitioned Convolution For Ambiophonics Surround SoundotringalNo ratings yet
- A Low Power Radix-2 FFT Accelerator For FPGADocument5 pagesA Low Power Radix-2 FFT Accelerator For FPGAMuhammad Majid AltafNo ratings yet
- Design and Simulation of 32-Point FFT Using Radix-2 Algorithm For FPGA 2012Document5 pagesDesign and Simulation of 32-Point FFT Using Radix-2 Algorithm For FPGA 2012mohamedNo ratings yet
- Multithreaded Algorithms For The Fast Fourier TransformDocument10 pagesMultithreaded Algorithms For The Fast Fourier Transformiv727No ratings yet
- Area-Efficient Architecture For Fast Fourier TransformDocument7 pagesArea-Efficient Architecture For Fast Fourier TransformRajesh BathijaNo ratings yet
- Paper Electronics ET009 SozopolDocument4 pagesPaper Electronics ET009 SozopolPrimitivo GonzálezNo ratings yet
- WiMAX Channel Simulation Uni ReportDocument5 pagesWiMAX Channel Simulation Uni Reportandygray119No ratings yet
- Transmitter Architecture for Pulsed OFDMDocument4 pagesTransmitter Architecture for Pulsed OFDMPramanshu SinghNo ratings yet
- A Fast and Area Efficient 2-D Convolver For Real Time Image ProcessingDocument5 pagesA Fast and Area Efficient 2-D Convolver For Real Time Image ProcessingdharamNo ratings yet
- HW-Efficient Reduced-Latency Configurable Mixed-Radix FFTDocument7 pagesHW-Efficient Reduced-Latency Configurable Mixed-Radix FFTnikolicnemanjaNo ratings yet
- Variable precision FP multiplier performance comparisonDocument4 pagesVariable precision FP multiplier performance comparisonRajesh BathijaNo ratings yet
- Efficient Radix-4 and Radix-8 Butterfly ElementsDocument6 pagesEfficient Radix-4 and Radix-8 Butterfly ElementsSuresh KumarNo ratings yet
- Z-Transform in DSP PDFDocument3 pagesZ-Transform in DSP PDFKanchan Gorain0% (1)
- Ijesat 2012 02 Si 01 02Document4 pagesIjesat 2012 02 Si 01 02Ijesat JournalNo ratings yet
- 1ea7 PDFDocument6 pages1ea7 PDFSwetha VanamNo ratings yet
- Floating Point ArithDocument8 pagesFloating Point ArithVishnupriya Akinapelli100% (1)
- FFT Algorithms: A Survey: Pavan Kumar K M, Priya Jain, Ravi Kiran S, Rohith N, Ramamani KDocument5 pagesFFT Algorithms: A Survey: Pavan Kumar K M, Priya Jain, Ravi Kiran S, Rohith N, Ramamani KSenthil SivakumarNo ratings yet
- Course Material (Question Bamk)Document4 pagesCourse Material (Question Bamk)lakshmiNo ratings yet
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- LEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingFrom EverandLEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- State Encoding: One-Hot Encoding Output EncodingDocument24 pagesState Encoding: One-Hot Encoding Output EncodingRajesh BathijaNo ratings yet
- 1984 Implementation of Cellular-Logic Operators Using 3 3 Convolution and Table Lookup HardwareDocument9 pages1984 Implementation of Cellular-Logic Operators Using 3 3 Convolution and Table Lookup HardwareRajesh BathijaNo ratings yet
- 7001ENG Week 6 PresentationsDocument17 pages7001ENG Week 6 PresentationsRajesh BathijaNo ratings yet
- BSNL Bill 2016-2017Document1 pageBSNL Bill 2016-2017Rajesh BathijaNo ratings yet
- 1987 New 2n DCT Algorithms Suitable For Vlsi ImplementationDocument4 pages1987 New 2n DCT Algorithms Suitable For Vlsi ImplementationRajesh BathijaNo ratings yet
- 1974 Fast One-Dimensional Digital Convolution by Multidimensional TechniquesDocument10 pages1974 Fast One-Dimensional Digital Convolution by Multidimensional TechniquesRajesh BathijaNo ratings yet
- 000154774Document118 pages000154774Rajesh BathijaNo ratings yet
- My Name Is Vipin KumarDocument1 pageMy Name Is Vipin KumarRajesh BathijaNo ratings yet
- Brief Profile Format-RKBDocument1 pageBrief Profile Format-RKBRajesh BathijaNo ratings yet
- 1974 Fast Convolution Using Fermat Number Transforms With Applications To Digital FilteringDocument11 pages1974 Fast Convolution Using Fermat Number Transforms With Applications To Digital FilteringRajesh BathijaNo ratings yet
- 1982 Sequential Convolution Techniques For Image FilteringDocument10 pages1982 Sequential Convolution Techniques For Image FilteringRajesh BathijaNo ratings yet
- 1994 A Fast Thresholded Linear Convolution Representation of Morphological OperationsDocument4 pages1994 A Fast Thresholded Linear Convolution Representation of Morphological OperationsRajesh BathijaNo ratings yet
- 1977 New Algorithms For Digital ConvolutionDocument19 pages1977 New Algorithms For Digital ConvolutionRajesh BathijaNo ratings yet
- 1996 Lossless Acceleration of Fractal Image Compression by Fast ConvolutionDocument4 pages1996 Lossless Acceleration of Fractal Image Compression by Fast ConvolutionRajesh BathijaNo ratings yet
- 1997 Perfect Reconstruction Circular Convolution Filter Banks and Their Application To The Implementation of Bandlimited Discrete Wavelet TransformsDocument4 pages1997 Perfect Reconstruction Circular Convolution Filter Banks and Their Application To The Implementation of Bandlimited Discrete Wavelet TransformsRajesh BathijaNo ratings yet
- 2014 IJRET - International Journal of Research in Engineering and TechnologyDocument4 pages2014 IJRET - International Journal of Research in Engineering and TechnologyRajesh BathijaNo ratings yet
- 1990 Parallel Implementation of The Convolution Method in Image ReconstructionDocument10 pages1990 Parallel Implementation of The Convolution Method in Image ReconstructionRajesh BathijaNo ratings yet
- Examples of Block Diagram ReductionDocument19 pagesExamples of Block Diagram ReductionRajesh BathijaNo ratings yet
- 2013 Jan 25 Docomo 300 Rs SurbhiDocument1 page2013 Jan 25 Docomo 300 Rs SurbhiRajesh BathijaNo ratings yet
- Assignment-2 Control SystemDocument4 pagesAssignment-2 Control SystemRajesh BathijaNo ratings yet
- 2013 VHDL Modeling of Booth Radix-4 Floating Point Multiplier For VLSI Designers LibraryDocument11 pages2013 VHDL Modeling of Booth Radix-4 Floating Point Multiplier For VLSI Designers LibraryRajesh BathijaNo ratings yet
- Contacts NoDocument105 pagesContacts NoRajesh BathijaNo ratings yet
- Assignment For Electronics I Year I SemDocument2 pagesAssignment For Electronics I Year I SemRajesh BathijaNo ratings yet
- File 0001Document41 pagesFile 0001Rajesh BathijaNo ratings yet
- Ercv16 07 2014Document4 pagesErcv16 07 2014Rajesh BathijaNo ratings yet
- 2005 Low Power N-Bit Adders and Multiplier Using Lowest-number-Of-transistor 1-Bit AddersDocument4 pages2005 Low Power N-Bit Adders and Multiplier Using Lowest-number-Of-transistor 1-Bit AddersRajesh BathijaNo ratings yet
- Chapter - 4single Stage IC Amplifier (For IT Class)Document85 pagesChapter - 4single Stage IC Amplifier (For IT Class)Rajesh BathijaNo ratings yet
- Quick Latex Tutorial: Rolando V. Raqueño Friday, June 06, 2014Document44 pagesQuick Latex Tutorial: Rolando V. Raqueño Friday, June 06, 2014Rajesh BathijaNo ratings yet
- Geetanjali Institute of Technical Studies, Udaipur Index of Co-Curricular ActivityDocument1 pageGeetanjali Institute of Technical Studies, Udaipur Index of Co-Curricular ActivityRajesh BathijaNo ratings yet
- Get Rid of Streamyx Intermittent ConnectionDocument8 pagesGet Rid of Streamyx Intermittent ConnectionsathevilNo ratings yet
- Unit6-DETECTION AND ESTIMATION PDFDocument24 pagesUnit6-DETECTION AND ESTIMATION PDFAdal ArasuNo ratings yet
- Basics of Designing MATV/community Antenna SystemsDocument11 pagesBasics of Designing MATV/community Antenna SystemsJacob JosephNo ratings yet
- Philips FWM 567 Service Manual PDFDocument79 pagesPhilips FWM 567 Service Manual PDFJaelNo ratings yet
- REC-551-POC-Quiz - 2Document1 pageREC-551-POC-Quiz - 2Jinendra JainNo ratings yet
- EEE207 Tutorial SolutionsDocument42 pagesEEE207 Tutorial SolutionsEarlJaysonAlvaran100% (1)
- Hearing Aid System Using MatlabDocument6 pagesHearing Aid System Using MatlabAbhishek ChedeNo ratings yet
- CMOS Analog Design Using All-Region MOSFET Modeling Fundamentals of Sampled-Data CircuitsDocument23 pagesCMOS Analog Design Using All-Region MOSFET Modeling Fundamentals of Sampled-Data Circuitsraju.kprr8862No ratings yet
- DR DG 10 Mo NRZDocument6 pagesDR DG 10 Mo NRZGilbertoLageNo ratings yet
- Irjet V4i877Document6 pagesIrjet V4i877Roselle LasagasNo ratings yet
- Ec PDFDocument212 pagesEc PDFwengNo ratings yet
- Sony DVP-F21 Service ManaulDocument90 pagesSony DVP-F21 Service ManaulwildkowNo ratings yet
- T-288ND/T-288NE User's Manual: Network Series ModemDocument85 pagesT-288ND/T-288NE User's Manual: Network Series ModemWest CharleNo ratings yet
- DCS Comprehension QuestionsDocument4 pagesDCS Comprehension QuestionsRameshkumar JayaramanNo ratings yet
- SUNRISE Measuring and Qualifying The UpstreamDocument110 pagesSUNRISE Measuring and Qualifying The UpstreamJorge Luis RodriguezNo ratings yet
- Bit Error Ratio BER in DVB As A Function of S/N: Application NoteDocument16 pagesBit Error Ratio BER in DVB As A Function of S/N: Application NoteIndra Al-KahfiNo ratings yet
- Robust Design Experiments For Better Products TaguchiDocument30 pagesRobust Design Experiments For Better Products TaguchiVikas GowdaNo ratings yet
- Garmin Gbr23 - Beacon Receiver Owners ManualDocument24 pagesGarmin Gbr23 - Beacon Receiver Owners ManualZemia LubaslikaNo ratings yet
- AD5933Document44 pagesAD5933janstein85No ratings yet
- EEM 702 Communication Engineering SyllabusDocument9 pagesEEM 702 Communication Engineering SyllabusMehar GuptaNo ratings yet
- Gaite Et Al., 2012. Crustal Structure of Mexico...Document12 pagesGaite Et Al., 2012. Crustal Structure of Mexico...maritalbNo ratings yet
- Marantz CD4000 PDFDocument28 pagesMarantz CD4000 PDFboroda2410No ratings yet
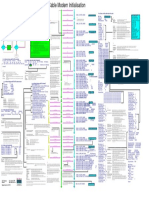
- Cisco CM - Initialization-Pdf-Wallchart PDFDocument1 pageCisco CM - Initialization-Pdf-Wallchart PDFjjmazueraNo ratings yet
- Activity Tracker User Guide 1.2Document19 pagesActivity Tracker User Guide 1.2ENo ratings yet
- A Comparison of FFT and Polyphase ChannelizersDocument49 pagesA Comparison of FFT and Polyphase Channelizerstasos1970No ratings yet
- Ads 8344Document13 pagesAds 8344mann_onlyNo ratings yet
- IJMSEDocument13 pagesIJMSEShafayat HossainNo ratings yet
- Chapter 3 SignalsDocument98 pagesChapter 3 SignalsMehedi AhamedNo ratings yet
- Phase OTDR Coherent DetectionDocument6 pagesPhase OTDR Coherent DetectiongeorgeNo ratings yet