You might also like
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarNo ratings yet
- Butterworth Filter DesignDocument12 pagesButterworth Filter DesignVannyMeiSariNo ratings yet
- EL220 Signals and Systems: Experiment # 12Document6 pagesEL220 Signals and Systems: Experiment # 12Choudhary Abdul AqeelNo ratings yet
- Band Pass Filter Design Part 1. Band Pass Filters From First Principles Richard Harris G3OTKDocument13 pagesBand Pass Filter Design Part 1. Band Pass Filters From First Principles Richard Harris G3OTKopachecoNo ratings yet
- Filters in GeneralDocument3 pagesFilters in GeneralJoseGarciaRuizNo ratings yet
- 2 - Higher-Order, Cascaded, Active Filters: ECE 6414: Continuous Time Filters (P. Allen) - Chapter 2 Page 2-1Document36 pages2 - Higher-Order, Cascaded, Active Filters: ECE 6414: Continuous Time Filters (P. Allen) - Chapter 2 Page 2-1Beigh Umair ZahoorNo ratings yet
- Active Filters GuideDocument60 pagesActive Filters GuideTuấnNguyễnNo ratings yet
- Filters 2Document60 pagesFilters 2Nguyễn Hoàng KhaNo ratings yet
- Principles of Communication Expt 1Document3 pagesPrinciples of Communication Expt 1Jam MagatNo ratings yet
- National Taiwan University Term Paper on Notch FiltersDocument43 pagesNational Taiwan University Term Paper on Notch Filtersanand248No ratings yet
- Active and Passive Filter CircuitsDocument10 pagesActive and Passive Filter CircuitsDavid.R.Gilson88% (8)
- Active Filters ExplainedDocument37 pagesActive Filters ExplainedHassan allaNo ratings yet
- ElectronicsIII Lect03Document45 pagesElectronicsIII Lect03林嚮往的啊啊No ratings yet
- Filter DesignDocument22 pagesFilter DesignAbdul Rozaq SyamsuddinNo ratings yet
- Sescar de Guzman Experiment PartialDocument9 pagesSescar de Guzman Experiment PartialKyle ChesterNo ratings yet
- Experiment RC FiltersDocument11 pagesExperiment RC FiltersingeniouNo ratings yet
- Active and Passive FiltersDocument11 pagesActive and Passive FiltersHemanshu DasNo ratings yet
- American International University-Bangladesh (Aiub) : Faculty of Engineering Department of EEEDocument10 pagesAmerican International University-Bangladesh (Aiub) : Faculty of Engineering Department of EEESajedul Islam RiyanNo ratings yet
- Analog Filter Design DemystifiedDocument11 pagesAnalog Filter Design DemystifiedSanjay Parelkar100% (1)
- Active Filter Design Techniques: Thomas KugelstadtDocument11 pagesActive Filter Design Techniques: Thomas KugelstadtYeimy Paola CamaargoNo ratings yet
- Butterworth vs Chebyshev Filters: Maximally Flat vs Equal Ripple ResponseDocument15 pagesButterworth vs Chebyshev Filters: Maximally Flat vs Equal Ripple ResponseZeyad Tareq Al SaroriNo ratings yet
- Butterworth FilterDocument6 pagesButterworth FilterSauravAbidRahmanNo ratings yet
- Advanced Power Electronics Homework #2 Filter StudyDocument19 pagesAdvanced Power Electronics Homework #2 Filter StudyTo Dinh DuNo ratings yet
- Active Filters Frequency ResponsesDocument24 pagesActive Filters Frequency ResponsesKhairy YaakobNo ratings yet
- A Basic Introduction To Band-Pass FilterDocument15 pagesA Basic Introduction To Band-Pass FilterTalal Al-SindiNo ratings yet
- Project Report On Notch Filters: Submitted To: Submitted byDocument15 pagesProject Report On Notch Filters: Submitted To: Submitted byIrfananjum0No ratings yet
- A Filter Primer: Application Note 733Document20 pagesA Filter Primer: Application Note 733msdn12000No ratings yet
- Band Pass FiltersDocument5 pagesBand Pass FiltersHeraNo ratings yet
- Lab - L3411Document10 pagesLab - L3411Muhammad AhmedNo ratings yet
- Linear IC Applications: Active Filters ExplainedDocument14 pagesLinear IC Applications: Active Filters Explainedeshwar_worldNo ratings yet
- Design and Characterization of A Band-Pass Filter PDFDocument6 pagesDesign and Characterization of A Band-Pass Filter PDFjgalindesNo ratings yet
- Lic Project ReportDocument9 pagesLic Project ReportJayachandra JVNo ratings yet
- Simple LC Filter IIDocument3 pagesSimple LC Filter IIdhananjaymohapatra2009No ratings yet
- Active Filter LabDocument10 pagesActive Filter LabHimmawan Sabda MaulanaNo ratings yet
- Audio Spectrum Analyzer - Circuit Desgin ProjectDocument29 pagesAudio Spectrum Analyzer - Circuit Desgin ProjectNinh Ngoc Dzu95% (22)
- BMEN 3120 Active Filters: Ami Shah 11/10/2015Document11 pagesBMEN 3120 Active Filters: Ami Shah 11/10/2015Ami ShahNo ratings yet
- 18ee63 DSP Module-3Document19 pages18ee63 DSP Module-3Appasabgouda BiradarNo ratings yet
- Bandpass Filter Tutorial2Document10 pagesBandpass Filter Tutorial2Ali SigNo ratings yet
- A Filter Primer (MXM AN733)Document20 pagesA Filter Primer (MXM AN733)Carlos GamioNo ratings yet
- BAND-PASS FILTER DESIGNDocument10 pagesBAND-PASS FILTER DESIGNAzmat GuldastaNo ratings yet
- Filters Active Passive N Switched CapacitorDocument24 pagesFilters Active Passive N Switched Capacitorgotti45No ratings yet
- Microwave FiltersDocument20 pagesMicrowave FiltersDiptiman BiswasNo ratings yet
- Monty B Bode Plots and First Order Filters ReportDocument11 pagesMonty B Bode Plots and First Order Filters ReportMonts 42No ratings yet
- ACtive Notch Filter DesignDocument43 pagesACtive Notch Filter DesignDrMohammad Rafee ShaikNo ratings yet
- Department of Electrical Engineering: Instrumentation Lab EE-702Document11 pagesDepartment of Electrical Engineering: Instrumentation Lab EE-702Mayur GuptaNo ratings yet
- Microwave Networks: DR L.Anjaneyulu NIT, WarangalDocument79 pagesMicrowave Networks: DR L.Anjaneyulu NIT, Warangalnaveenchennuri_iasNo ratings yet
- Design and Analysis of A 2.4 GHZ, Fifth - Order Chebyshev Microstrip LPFDocument6 pagesDesign and Analysis of A 2.4 GHZ, Fifth - Order Chebyshev Microstrip LPFJournal of TelecommunicationsNo ratings yet
- Bandstop Filters and The Bainter Topology: by Bonnie C. BakerDocument5 pagesBandstop Filters and The Bainter Topology: by Bonnie C. Bakerpaoki01No ratings yet
- احمد تركي كحيوش 2Document30 pagesاحمد تركي كحيوش 2أحمد تركي كحيوشNo ratings yet
- Updated RFD Lab Manual PDFDocument46 pagesUpdated RFD Lab Manual PDFAminaMouhoucheNo ratings yet
- Lab 1:introduction To Signals, Passive RC Filters and OpampsDocument7 pagesLab 1:introduction To Signals, Passive RC Filters and Opampsmrcinek01No ratings yet
- Low Pass Filter Guide: Cutoff Frequencies & RC CircuitsDocument7 pagesLow Pass Filter Guide: Cutoff Frequencies & RC CircuitsYawar ArslanNo ratings yet
- 2nd Order, 3rd Order FiltersDocument9 pages2nd Order, 3rd Order FiltersYashaswa JainNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Basics of Schmitt Trigger - How Schmitt Trigger WorksDocument15 pagesBasics of Schmitt Trigger - How Schmitt Trigger WorksShoaib MughalNo ratings yet
- Course Outline-EE360 Control Systems Spring 2020Document5 pagesCourse Outline-EE360 Control Systems Spring 2020Shoaib MughalNo ratings yet
- Course Outline-EE360 Control Systems Spring 2020Document5 pagesCourse Outline-EE360 Control Systems Spring 2020Shoaib MughalNo ratings yet
- Formation of Bus Admittance Matrix UsingDocument24 pagesFormation of Bus Admittance Matrix UsingQuazi Mosaddequl Haque100% (1)
- Magnetic CircuitsDocument31 pagesMagnetic CircuitsBineilKcThapaNo ratings yet
- Assignment # 2 Chapter # 2 & 3 Control SystemsDocument1 pageAssignment # 2 Chapter # 2 & 3 Control SystemsShoaib MughalNo ratings yet
- Fuel Starvation Pem PDFDocument8 pagesFuel Starvation Pem PDFShoaib MughalNo ratings yet
- ECE 476 - Power System Analysis Fall 2011 TR 12:30-2 PM: and Design, Fifth Edition, Thomson, 2011Document1 pageECE 476 - Power System Analysis Fall 2011 TR 12:30-2 PM: and Design, Fifth Edition, Thomson, 2011ratheeshkumardNo ratings yet
- 19 Applications of Proton Exchange Membrane Fuel Cell SystemsDocument19 pages19 Applications of Proton Exchange Membrane Fuel Cell SystemsTung HuynhNo ratings yet
- Comparison of The DCDC Converters For Fuel Cell ApplicationsDocument9 pagesComparison of The DCDC Converters For Fuel Cell ApplicationsShoaib MughalNo ratings yet
- Magnetic Circuits, Materials GDocument52 pagesMagnetic Circuits, Materials Giorek_22No ratings yet
- ZBus matrix building algorithmDocument10 pagesZBus matrix building algorithmsandeepbabu28No ratings yet
- Lab10 PDFDocument4 pagesLab10 PDFShoaib MughalNo ratings yet
- How To Write A Letter of MotivationDocument1 pageHow To Write A Letter of MotivationShoaib MughalNo ratings yet
- EEG Based Machine Control: Department of Electronics and Communication EngineeringDocument4 pagesEEG Based Machine Control: Department of Electronics and Communication EngineeringShoaib MughalNo ratings yet
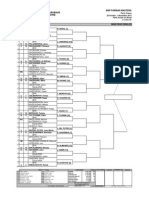
- BNP Paribas Masters: Main Draw SinglesDocument1 pageBNP Paribas Masters: Main Draw SinglesShoaib MughalNo ratings yet
- 09 Clippers & ClampersDocument6 pages09 Clippers & ClampersJian LastinoNo ratings yet
- Application GuideDocument8 pagesApplication GuidejuliocanalesNo ratings yet
- Sentence CompletionDocument4 pagesSentence CompletionShoaib MughalNo ratings yet
- LM Ece Ew Manual 01112012Document0 pagesLM Ece Ew Manual 01112012Shoaib MughalNo ratings yet
- FYP - 1 ReportDocument10 pagesFYP - 1 ReportShoaib MughalNo ratings yet
- Engineering ManagementDocument26 pagesEngineering ManagementShoaib MughalNo ratings yet
- Measure Power & Energy in 1-φ AC CircuitsDocument2 pagesMeasure Power & Energy in 1-φ AC CircuitsShoaib MughalNo ratings yet
- LM WShopTechnology PDFDocument0 pagesLM WShopTechnology PDFShoaib MughalNo ratings yet
- Milling: VFT RPM DinDocument3 pagesMilling: VFT RPM Dinhammada1001No ratings yet
- Power Factor Correction ExplanationDocument4 pagesPower Factor Correction ExplanationShoaib MughalNo ratings yet
- Bill 2012 6Document16 pagesBill 2012 6Shoaib MughalNo ratings yet
- Fin MathDocument11 pagesFin MathShoaib MughalNo ratings yet
- Principle of LVDTDocument3 pagesPrinciple of LVDTShoaib MughalNo ratings yet
- AirROC T35 D45 D50 Tech SpecDocument4 pagesAirROC T35 D45 D50 Tech SpecmdelvallevNo ratings yet
- Troublesshooting Manual 3b6 PDFDocument50 pagesTroublesshooting Manual 3b6 PDFAgnieszka Wawrzyniak Rybka100% (1)
- Prova ScrumDocument11 pagesProva ScrumJoanna de Cassia ValadaresNo ratings yet
- Service Manual Aire Central Lg. Ln-C0602sa0 PDFDocument31 pagesService Manual Aire Central Lg. Ln-C0602sa0 PDFFreddy Enrique Luna MirabalNo ratings yet
- Spjc/Lim Lima-Callao, Peru: .Radar - Minimum.AltitudesDocument41 pagesSpjc/Lim Lima-Callao, Peru: .Radar - Minimum.AltitudesVicente PortocarreroNo ratings yet
- Comprehensive Case 1 BKAR3033 A221Document3 pagesComprehensive Case 1 BKAR3033 A221naufal hazimNo ratings yet
- Course Contents: Academic Session 2020-21 B.A. LL.B. (Hons.) Tenth SemesterDocument52 pagesCourse Contents: Academic Session 2020-21 B.A. LL.B. (Hons.) Tenth SemesterShashank PandeyNo ratings yet
- Princeton Review GRE ScheduleDocument1 pagePrinceton Review GRE ScheduleNishant PanigrahiNo ratings yet
- SafeCargo PDFDocument76 pagesSafeCargo PDFSyukry MaulidyNo ratings yet
- Sample Demand LetterDocument3 pagesSample Demand LetterShaniemielle Torres-BairanNo ratings yet
- Valuing Common and Preferred SharesDocument31 pagesValuing Common and Preferred SharesAdam Mo AliNo ratings yet
- Introducing Global PoliticsDocument8 pagesIntroducing Global PoliticsMeann Joy BaclayonNo ratings yet
- Industrial Tour Report (JEWEL - MANAGEMENT-CU)Document37 pagesIndustrial Tour Report (JEWEL - MANAGEMENT-CU)Mohammad Jewel100% (2)
- 803 Web Application Class XI 1Document254 pages803 Web Application Class XI 1Naina KanojiaNo ratings yet
- InkscapePDFLaTeX PDFDocument3 pagesInkscapePDFLaTeX PDFFrancesco ReaNo ratings yet
- Announcement: Inter-And Intra-Sectoral Dynamics For Transforming Indian AgricultureDocument8 pagesAnnouncement: Inter-And Intra-Sectoral Dynamics For Transforming Indian AgricultureEnamul HaqueNo ratings yet
- Relocation Guide Version 5.6 - New BrandingDocument29 pagesRelocation Guide Version 5.6 - New BrandingEndika AbiaNo ratings yet
- Image Processing Toolbox - FunctionsDocument16 pagesImage Processing Toolbox - Functionsabcd efghNo ratings yet
- Components in Action Script 2.0 UNIT 3Document4 pagesComponents in Action Script 2.0 UNIT 3k.nagendraNo ratings yet
- Breadtalk AR 2011Document158 pagesBreadtalk AR 2011Wong ZieNo ratings yet
- Cs 2032 Data Warehousing and Data Mining Question Bank by GopiDocument6 pagesCs 2032 Data Warehousing and Data Mining Question Bank by Gopiapi-292373744No ratings yet
- PSK Lab ManualDocument4 pagesPSK Lab ManualSakshi DewadeNo ratings yet
- ElasticityDocument27 pagesElasticityJames Baryl GarceloNo ratings yet
- Cement Lined Piping SpecificationDocument167 pagesCement Lined Piping SpecificationvenkateshwaranNo ratings yet
- Computer Security: Principles and PracticeDocument21 pagesComputer Security: Principles and Practicekrishnakumar velapanNo ratings yet
- Nonlinear Optimization: Benny YakirDocument38 pagesNonlinear Optimization: Benny YakirMahfuzulhoq ChowdhuryNo ratings yet
- Advance NewsletterDocument14 pagesAdvance Newsletterapi-206881299No ratings yet
- TopGearDocument188 pagesTopGearbarborina10% (1)
- Power BI 101@ ScaleDocument46 pagesPower BI 101@ ScalePRANAV INDINo ratings yet
- Vissim 11 - ManualDocument1,219 pagesVissim 11 - Manualmauricionsantos60% (5)