You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Literal Equations Name ProjectDocument4 pagesLiteral Equations Name Projectapi-297789948No ratings yet
- Margarine 12Document74 pagesMargarine 12the_gunners2004No ratings yet
- Cylinders of The PharaohDocument18 pagesCylinders of The PharaohiguandiánNo ratings yet
- Optimization of New Geometries of Switched Reluctances Motors Using FEM and Multi Objective Genetic AlgorithmDocument16 pagesOptimization of New Geometries of Switched Reluctances Motors Using FEM and Multi Objective Genetic Algorithmarnika33No ratings yet
- Design of A 43kW Switched Reluctance Machine For A High-Performance Hybrid Electric VehicleDocument6 pagesDesign of A 43kW Switched Reluctance Machine For A High-Performance Hybrid Electric Vehiclearnika33No ratings yet
- Cannizzaro 2016 JEDocument7 pagesCannizzaro 2016 JEarnika33No ratings yet
- Cannizzaro 2016 JEDocument7 pagesCannizzaro 2016 JEarnika33No ratings yet
- A Survey On Rotary-Linear Motors Used in Emerging ApplicationsDocument6 pagesA Survey On Rotary-Linear Motors Used in Emerging Applicationsarnika33No ratings yet
- Using Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine GeneratorsDocument4 pagesUsing Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine Generatorsarnika33No ratings yet
- On The Use of Rotary-Linear Generators in Floating Hybrid Wind and Wave Energy Conversion SystemsDocument6 pagesOn The Use of Rotary-Linear Generators in Floating Hybrid Wind and Wave Energy Conversion Systemsarnika33No ratings yet
- Control of Switched Reluctance Motor by Current Profiling Under Normal and Open Phase Operating ConditionDocument9 pagesControl of Switched Reluctance Motor by Current Profiling Under Normal and Open Phase Operating Conditionarnika33No ratings yet
- Novel Permanent Magnet Tubular Linear Generator For Wave Energy ConvertersDocument5 pagesNovel Permanent Magnet Tubular Linear Generator For Wave Energy Convertersarnika33No ratings yet
- Design and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.TDocument5 pagesDesign and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.Tarnika33No ratings yet
- Preliminary Comparative Study of Several Structures of Permanent-Magnet Synchronous Generator Used in Wind Energy System OptimizationDocument9 pagesPreliminary Comparative Study of Several Structures of Permanent-Magnet Synchronous Generator Used in Wind Energy System Optimizationarnika33No ratings yet
- FEM Based Prototype of Moving-Coil Coreless Linear-Generator (MCCLG) For Wave Energy ExtractionDocument6 pagesFEM Based Prototype of Moving-Coil Coreless Linear-Generator (MCCLG) For Wave Energy Extractionarnika33No ratings yet
- The History of Using Solar EnergyDocument8 pagesThe History of Using Solar Energyarnika33No ratings yet
- Design and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.TDocument5 pagesDesign and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.Tarnika33No ratings yet
- The Determination of Effects of Primary and Secondary Geometry of Tubular Linear GeneratorDocument6 pagesThe Determination of Effects of Primary and Secondary Geometry of Tubular Linear Generatorarnika33No ratings yet
- Ferkova 2017 EDPEDocument4 pagesFerkova 2017 EDPEarnika33No ratings yet
- Using Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine GeneratorsDocument4 pagesUsing Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine Generatorsarnika33No ratings yet
- 03 Paper 1010 CepoiDocument6 pages03 Paper 1010 Cepoiarnika33No ratings yet
- The History of Using Solar EnergyDocument8 pagesThe History of Using Solar Energyarnika33No ratings yet
- Computer Aided Modeling and Simulation of Bio-Inspired Hardware SystemsDocument6 pagesComputer Aided Modeling and Simulation of Bio-Inspired Hardware Systemsarnika33No ratings yet
- Wavelet Transform Approach To Rotor Faults Detection in Induction MotorsDocument6 pagesWavelet Transform Approach To Rotor Faults Detection in Induction Motorsarnika33No ratings yet
- Developing Control Techniques For Two-Coordinate Planar Positioning Systems by Means of Coupled Advanced Simulation ToolsDocument6 pagesDeveloping Control Techniques For Two-Coordinate Planar Positioning Systems by Means of Coupled Advanced Simulation Toolsarnika33No ratings yet
- Theoretical and Experimental Study of A Modular Tubular Transverse Flux Reluctance MachineDocument15 pagesTheoretical and Experimental Study of A Modular Tubular Transverse Flux Reluctance Machinearnika33No ratings yet
- Direct Drive System With Two Phase Transverse Flux Disc-Type MotorDocument6 pagesDirect Drive System With Two Phase Transverse Flux Disc-Type Motorarnika33No ratings yet
- The Evolution of CapacitorsDocument5 pagesThe Evolution of Capacitorsarnika33No ratings yet
- Torque Smoothing of A Fault Tolerant Segmental Stator Switched Reluctance MotorDocument7 pagesTorque Smoothing of A Fault Tolerant Segmental Stator Switched Reluctance Motorarnika33No ratings yet
- Transverse Flux Motor Drive DynamicsDocument4 pagesTransverse Flux Motor Drive Dynamicsarnika33No ratings yet
- Software Environment For Online Simulation of Switched Reluctance MachinesDocument25 pagesSoftware Environment For Online Simulation of Switched Reluctance Machinesarnika33No ratings yet
- Modular Stator Switched Reluctance Motor For Fault Tolerant Drive SystemsDocument11 pagesModular Stator Switched Reluctance Motor For Fault Tolerant Drive Systemsarnika33No ratings yet
- Comparative Study of Switched and Synchronous Reluctance Machines For Electric PropulsionDocument4 pagesComparative Study of Switched and Synchronous Reluctance Machines For Electric Propulsionarnika33No ratings yet
- 2012 - Mak - NatMater - Tightly Bound Trions in Monolayer MoS2Document5 pages2012 - Mak - NatMater - Tightly Bound Trions in Monolayer MoS2Liqin SuNo ratings yet
- 39 Space Air DistributionDocument25 pages39 Space Air DistributionPRASAD326100% (3)
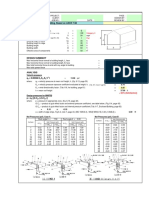
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Document2 pagesWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldNo ratings yet
- Flange CouplingDocument16 pagesFlange CouplingARUN VNo ratings yet
- At The Completion of The CourseDocument2 pagesAt The Completion of The Courseoday albuthbahakNo ratings yet
- MRAM: Magnetic Random Access MemoryDocument15 pagesMRAM: Magnetic Random Access MemoryJoyitaNo ratings yet
- Atomic Structure Basic ConceptsDocument39 pagesAtomic Structure Basic ConceptsTithiparna SenguptaNo ratings yet
- Generator DataDocument8 pagesGenerator DataMohammad Ibnul HossainNo ratings yet
- IME Micro ProjectDocument4 pagesIME Micro Projectshubhamghodekar76No ratings yet
- Happens To Be A Uniform Ellipsoid: Chapter 16 Gauss' LawDocument7 pagesHappens To Be A Uniform Ellipsoid: Chapter 16 Gauss' LawSamuel PakianathanNo ratings yet
- Energy Balance CalculationDocument2 pagesEnergy Balance CalculationSzelee KuekNo ratings yet
- Experiment 3 MOMDocument6 pagesExperiment 3 MOMHafiz HamzaNo ratings yet
- ANSYS FLUENT Population Balance Module ManualDocument80 pagesANSYS FLUENT Population Balance Module ManualGokul PrabuNo ratings yet
- Properties of Matter Test ReviewDocument9 pagesProperties of Matter Test ReviewAngel PeayNo ratings yet
- Bunker DesignDocument25 pagesBunker DesignswatkoolNo ratings yet
- Calculable Cross CapacitorDocument43 pagesCalculable Cross Capacitornova1234No ratings yet
- Robot DynamicsDocument52 pagesRobot Dynamicssilviocus88No ratings yet
- DividersDocument7 pagesDividersVenkatesh KarriNo ratings yet
- Physics of Electromagnetic Calorimeters Based On Crystal ScintillatorsDocument49 pagesPhysics of Electromagnetic Calorimeters Based On Crystal ScintillatorsVigneshRamakrishnanNo ratings yet
- Phreatic Line PDFDocument21 pagesPhreatic Line PDFshubhamNo ratings yet
- Str-A6051 52 53 59 61 62 69 79Document13 pagesStr-A6051 52 53 59 61 62 69 79Александр АндриановNo ratings yet
- Experimental study of four-point bending test on CLT deep beamsDocument6 pagesExperimental study of four-point bending test on CLT deep beamsFergus GardnerNo ratings yet
- Lang SethDocument52 pagesLang Sethrrmerlin_2No ratings yet
- 2 Alternating CurrentsDocument20 pages2 Alternating CurrentsJaseela NaufalNo ratings yet
- Quantum Mechanics EssentialsDocument56 pagesQuantum Mechanics EssentialsMuhammad ZeeshanNo ratings yet
- Helium Pycnometry Density TestDocument2 pagesHelium Pycnometry Density TestDapoer OmaOpa100% (1)
- Physics Investigatory ProjectDocument18 pagesPhysics Investigatory ProjectRΛJIBUL ISLΛMNo ratings yet