You might also like
- Reactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisDocument10 pagesReactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisjandazNo ratings yet
- The Ship's Electrical Network, Engine Control and AutomationDocument6 pagesThe Ship's Electrical Network, Engine Control and AutomationJohn SmithNo ratings yet
- Dynamic Disturbance of Wind Farm Connected to 14 Bus Network Using STATCOMDocument6 pagesDynamic Disturbance of Wind Farm Connected to 14 Bus Network Using STATCOMSandeep KumarNo ratings yet
- Simulation Model of Hydro Power PlantDocument7 pagesSimulation Model of Hydro Power Plantwoldemariam workuNo ratings yet
- Actual Wind EnergyDocument11 pagesActual Wind EnergyAbhishek V DeshpandeNo ratings yet
- 2008 Braun EwecDocument10 pages2008 Braun EwecfarzanesunflowerNo ratings yet
- Wind Generator Power Flow Modeling GuideDocument14 pagesWind Generator Power Flow Modeling Guidekunsridhar8901No ratings yet
- Harmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesDocument8 pagesHarmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesijcctsNo ratings yet
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- Novel Control of Grid Connected Photovoltaic (PV) Solar Farm For Improving Transient Stability and Transmission Limits Both During Night and DayDocument8 pagesNovel Control of Grid Connected Photovoltaic (PV) Solar Farm For Improving Transient Stability and Transmission Limits Both During Night and DayNCNo ratings yet
- Limite Reactiva DFIGDocument9 pagesLimite Reactiva DFIGMartin__PringleNo ratings yet
- An Improved Electronic Load Controller For Isolated Small Hydro Wind Hybrid SystemDocument12 pagesAn Improved Electronic Load Controller For Isolated Small Hydro Wind Hybrid SystemShakeel RanaNo ratings yet
- A Simple Flywheel Induction Motor For Large Power Short Time Compensation in Inverter-Driven Stand-Alone Power SystemsDocument7 pagesA Simple Flywheel Induction Motor For Large Power Short Time Compensation in Inverter-Driven Stand-Alone Power SystemstalatsonNo ratings yet
- A Comparative Analisys of FACTS Devices Implemented in The Romanian Power SystemDocument6 pagesA Comparative Analisys of FACTS Devices Implemented in The Romanian Power SystemsalmanNo ratings yet
- Micro Hydro Power Plant With Three-Phase Induction Generator Feeding Single-Phase ConsumersDocument6 pagesMicro Hydro Power Plant With Three-Phase Induction Generator Feeding Single-Phase ConsumersElisrayNo ratings yet
- Distribution System DesignDocument6 pagesDistribution System DesignMAcryan Pacquiao PactolNo ratings yet
- 510 TorresDocument6 pages510 TorresnavidelecNo ratings yet
- Performance and Analysis of STATCOM For Damping Power System Disturbances Using Fuzzy Logic ControllerDocument11 pagesPerformance and Analysis of STATCOM For Damping Power System Disturbances Using Fuzzy Logic ControllerBerhanu ZelalemNo ratings yet
- Steady State Analysis of Wind TurbineDocument7 pagesSteady State Analysis of Wind TurbineKhy-khy PutraNo ratings yet
- Study of Autonomous Hybrid Power System Using SVC and StatcomDocument5 pagesStudy of Autonomous Hybrid Power System Using SVC and StatcomtinazdrilicNo ratings yet
- Report On Aircraft Electrical Systems BackgroundDocument5 pagesReport On Aircraft Electrical Systems BackgroundRahul ChandranNo ratings yet
- Power Marine ManagementDocument4 pagesPower Marine ManagementSyby SibelNo ratings yet
- Power Electronics Powertrain ArchitecturDocument6 pagesPower Electronics Powertrain ArchitecturArumi MarNo ratings yet
- Dynamic Modeling of GE Wind TurbineDocument7 pagesDynamic Modeling of GE Wind TurbineLaura RoseroNo ratings yet
- Reactive Power Sharing in Ship Energy Systems With Shaft GeneratorsDocument18 pagesReactive Power Sharing in Ship Energy Systems With Shaft GeneratorsFares MalakNo ratings yet
- Development of An Independent Type of Hybrid Power Generation SystemDocument6 pagesDevelopment of An Independent Type of Hybrid Power Generation SystemUshma V PatelNo ratings yet
- Dynamic CompensationDocument6 pagesDynamic Compensationhiabhijit29No ratings yet
- Hybrid BatteryDocument10 pagesHybrid BatterySamundra GurungNo ratings yet
- Enhancing LVRT Capability of DFIG Wind Turbines Using Advanced Control StrategyDocument8 pagesEnhancing LVRT Capability of DFIG Wind Turbines Using Advanced Control StrategyHeather CarterNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Motor-Generator - WikipediaDocument7 pagesMotor-Generator - Wikipediahema FawzyNo ratings yet
- Transient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropDocument8 pagesTransient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropIAEME PublicationNo ratings yet
- 1st International Nuclear and Renewable Energy Conference Proceedings Examines Dynamic Disturbance of Wind Farm Connected to Power GridDocument6 pages1st International Nuclear and Renewable Energy Conference Proceedings Examines Dynamic Disturbance of Wind Farm Connected to Power GridArifah HamidunNo ratings yet
- Eiwp02 13Document5 pagesEiwp02 13user765No ratings yet
- Mat LabDocument74 pagesMat LabA RakeshNo ratings yet
- Frequency and Load ControlDocument37 pagesFrequency and Load Controlobisonandlaw100% (1)
- Autonomous Hybrid System Using Pmsgs For Hydro and Wind Power GenerationDocument6 pagesAutonomous Hybrid System Using Pmsgs For Hydro and Wind Power GenerationVineet P ChandranNo ratings yet
- A Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridDocument4 pagesA Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridbarneypseNo ratings yet
- Raviraju Published PaperDocument10 pagesRaviraju Published Paperraviraju2498No ratings yet
- Harmonic Reduction IEEE PaperDocument6 pagesHarmonic Reduction IEEE PaperRajasekaranViswaNo ratings yet
- Enhancing Power System Stability of Wind Farm Equipped With Permanent Magnet Synchronous Generator Using Back To Back ConvertorDocument6 pagesEnhancing Power System Stability of Wind Farm Equipped With Permanent Magnet Synchronous Generator Using Back To Back ConvertorMahendiran CrNo ratings yet
- Ram MEEDocument14 pagesRam MEEBudhar Ramaji EknathNo ratings yet
- 2 Ares - 1502.00215ggDocument6 pages2 Ares - 1502.00215ggMatheus MaiaNo ratings yet
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDocument8 pagesImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanNo ratings yet
- Dynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsDocument7 pagesDynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-GeneratorsPacha MamiNo ratings yet
- MAPÚA UNIVERSITY POWER PLANT ENGINEERING DESIGN PROJECTDocument13 pagesMAPÚA UNIVERSITY POWER PLANT ENGINEERING DESIGN PROJECTRick AlvientoNo ratings yet
- Ijsta P11 Cem 08Document18 pagesIjsta P11 Cem 08amir amirNo ratings yet
- A Neutral-Point Clamped Converter System For Direct-Drive Variable-Speed Wind Power UnitDocument12 pagesA Neutral-Point Clamped Converter System For Direct-Drive Variable-Speed Wind Power UnitNguyen Nga-VietNo ratings yet
- UNIT-2 Introduction To Facts: Need For Transmission Networks InterconnectionsDocument13 pagesUNIT-2 Introduction To Facts: Need For Transmission Networks Interconnectionspadma kalyan RelaNo ratings yet
- Electrical Generation and Distribution On Cargo ShipDocument10 pagesElectrical Generation and Distribution On Cargo ShipDavid Ella Inalegwu100% (2)
- Pinaki Mitra Ganesh K. Venayagamoorthy: Intelligent Coordinated Control of A Wind Farm and Distributed SmartparksDocument8 pagesPinaki Mitra Ganesh K. Venayagamoorthy: Intelligent Coordinated Control of A Wind Farm and Distributed SmartparksscribsunilNo ratings yet
- A Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersDocument10 pagesA Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersAJER JOURNALNo ratings yet
- Improved Three Phase Single Phase Torque Cancellation IEEEAccess2021Document10 pagesImproved Three Phase Single Phase Torque Cancellation IEEEAccess2021DEBARATI DAMNo ratings yet
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesDocument7 pagesModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilNo ratings yet
- Control of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridDocument6 pagesControl of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridNam GiangNo ratings yet
- Primary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEDocument8 pagesPrimary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEМилан ЛукићNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Usermanual en SLDDocument181 pagesUsermanual en SLDellie210879No ratings yet
- Short Circuit Current CalculationDocument52 pagesShort Circuit Current CalculationSamarakoon Banda100% (2)
- Sgre 2013052714274989Document4 pagesSgre 2013052714274989ellie210879No ratings yet
- Jpee 2014041715575051Document8 pagesJpee 2014041715575051ellie210879No ratings yet
- Short Circuit Current CalculationDocument52 pagesShort Circuit Current CalculationSamarakoon Banda100% (2)
- About The Circuit Builder Electrical Standards Database - AutoCAD Electrical - Autodesk Knowledge NetworkDocument17 pagesAbout The Circuit Builder Electrical Standards Database - AutoCAD Electrical - Autodesk Knowledge Networkellie210879No ratings yet
- About Circuits - AutoCAD Electrical - Autodesk Knowledge NetworkDocument4 pagesAbout Circuits - AutoCAD Electrical - Autodesk Knowledge Networkellie210879No ratings yet
- About Referencing An Existing Circuit - AutoCAD Electrical - Autodesk Knowledge NetworkDocument5 pagesAbout Referencing An Existing Circuit - AutoCAD Electrical - Autodesk Knowledge Networkellie210879No ratings yet
- About Customizing Circuit Builder - AutoCAD Electrical - Autodesk Knowledge NetworkDocument4 pagesAbout Customizing Circuit Builder - AutoCAD Electrical - Autodesk Knowledge Networkellie210879No ratings yet
- On The Communication Requirements For The Smart Grid: Mohamed Daoud, Xavier FernandoDocument8 pagesOn The Communication Requirements For The Smart Grid: Mohamed Daoud, Xavier Fernandoellie210879No ratings yet
- Sgre 2013022615342020Document12 pagesSgre 2013022615342020ellie210879No ratings yet
- Brake Torque Application DataDocument0 pagesBrake Torque Application Dataellie210879No ratings yet
- Free AutoCAD Tutorials - Attributes and Data Extraction in AutoCAD 2010Document11 pagesFree AutoCAD Tutorials - Attributes and Data Extraction in AutoCAD 2010ellie210879No ratings yet
- A Multi-Agent Framework For Operation of A Smart GridDocument7 pagesA Multi-Agent Framework For Operation of A Smart Gridellie210879No ratings yet
- PHD Thesis - Induction Motor Fault Diagnostic and Monitoring MethodsDocument159 pagesPHD Thesis - Induction Motor Fault Diagnostic and Monitoring MethodsCiprian HarliscaNo ratings yet
- Sgre 2013022615342020Document12 pagesSgre 2013022615342020ellie210879No ratings yet
- 2D AutoCADDocument255 pages2D AutoCADellie210879No ratings yet
- D790C12000Document2 pagesD790C12000ellie210879No ratings yet
- ဖက္စြတ္မိုးDocument130 pagesဖက္စြတ္မိုးellie210879No ratings yet
- Moe Nyein Aye - Nwe Nay Out Mhar KwayDocument197 pagesMoe Nyein Aye - Nwe Nay Out Mhar KwayweenyinNo ratings yet
- Bolt Size ConversionDocument3 pagesBolt Size Conversionapi-3712612100% (3)
- En Acs800 07 Hwman e UpdatenoticeDocument196 pagesEn Acs800 07 Hwman e Updatenoticeellie210879No ratings yet
- PHD Thesis - Induction Motor Fault Diagnostic and Monitoring MethodsDocument159 pagesPHD Thesis - Induction Motor Fault Diagnostic and Monitoring MethodsCiprian HarliscaNo ratings yet
- C511 Analogue Temperature Monitoring Relay-1Document5 pagesC511 Analogue Temperature Monitoring Relay-1ellie210879No ratings yet
- K RedundancyDocument29 pagesK Redundancyellie210879No ratings yet
- Ordering Guide & Technical Information: Absolute Process Control Know Where You Are... RegardlessDocument56 pagesOrdering Guide & Technical Information: Absolute Process Control Know Where You Are... RegardlessEduard RamosNo ratings yet
- IS5 ManualDocument156 pagesIS5 ManualAnonymous GbfoQcC0% (1)
- 15 - Omar Et AlDocument13 pages15 - Omar Et AlFlogamagNo ratings yet
- CPRI - EMI - EMC Test Facility, BangaloreDocument3 pagesCPRI - EMI - EMC Test Facility, Bangaloresaidhana79No ratings yet
- State of Industry Report 2020 PDFDocument205 pagesState of Industry Report 2020 PDFimranNo ratings yet
- FTC Catalogue - 2022Document71 pagesFTC Catalogue - 2022claudioNo ratings yet
- GR-4/UN/V2: Common To Emergency Luminaire Converters Technical SpecificationsDocument3 pagesGR-4/UN/V2: Common To Emergency Luminaire Converters Technical SpecificationsMarius Iulian HASNo ratings yet
- Page Navigation 690: Online Six Sigma Courses Best Stocks To Invest inDocument1 pagePage Navigation 690: Online Six Sigma Courses Best Stocks To Invest inAlfredo JiménezNo ratings yet
- Tevion Cordless Headphones Instruction ManualDocument5 pagesTevion Cordless Headphones Instruction ManualMeet Joe BNo ratings yet
- Dilla University: College of Engineering and TechnologyDocument45 pagesDilla University: College of Engineering and TechnologyZedo ZedoNo ratings yet
- Phelps Dodge PH - 2021 Product BrochureDocument48 pagesPhelps Dodge PH - 2021 Product BrochureNoel Fajardo Domingo100% (1)
- C-L-X Type MC-HL (XHHW-2) : Product DataDocument4 pagesC-L-X Type MC-HL (XHHW-2) : Product DatacubarturNo ratings yet
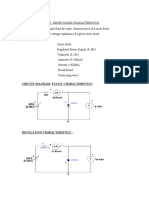
- AIM: - A) To Observe and Draw The Static Characteristics of A Zener DiodeDocument3 pagesAIM: - A) To Observe and Draw The Static Characteristics of A Zener DiodeAnonymous eWMnRr70qNo ratings yet
- 3G3PV (E7) en ManualDocument258 pages3G3PV (E7) en ManualBojan BosiljcicNo ratings yet
- This Operation Manual Is Intended For Users With Basic Knowledge of Electricity and Electric Devices. LSLV-M100 Is The Official Name For The M100 Series InvertersDocument268 pagesThis Operation Manual Is Intended For Users With Basic Knowledge of Electricity and Electric Devices. LSLV-M100 Is The Official Name For The M100 Series InvertersLaurentiu LapusescuNo ratings yet
- Naukri SonuKumarYadav (7y 6m)Document3 pagesNaukri SonuKumarYadav (7y 6m)abhinay.vijayakarNo ratings yet
- APC EASY UPS BV 650VA, AVR, Universal Outlet, 230V: Technical SpecificationsDocument3 pagesAPC EASY UPS BV 650VA, AVR, Universal Outlet, 230V: Technical SpecificationsUsman QureshiNo ratings yet
- QBCR.E85310 - Outlet and Junction Boxes For Use in Hazardous Locations - UL Product IqDocument4 pagesQBCR.E85310 - Outlet and Junction Boxes For Use in Hazardous Locations - UL Product Iqjuan palominoNo ratings yet
- 06 BuyLog2013 MoldedCaseCircBrkrsDocument106 pages06 BuyLog2013 MoldedCaseCircBrkrsKaren SaltosNo ratings yet
- IEC 60255 Electrical RelaysDocument1 pageIEC 60255 Electrical RelaysJeya Kannan0% (4)
- STR-X6400 Application GuideDocument24 pagesSTR-X6400 Application Guidekorodiferenc9258No ratings yet
- Europower LQDocument52 pagesEuropower LQMehran Khan KhattakNo ratings yet
- Chapter1mechanicalmeasurement 160309072647Document19 pagesChapter1mechanicalmeasurement 160309072647bd9051No ratings yet
- XW Pro AC Coupling Solutions Guide: 990-6421 December 2020Document16 pagesXW Pro AC Coupling Solutions Guide: 990-6421 December 2020Anselmo Aguado cortesNo ratings yet
- Emotron VSX VSM VSR Vse Vss User Manual .EnDocument180 pagesEmotron VSX VSM VSR Vse Vss User Manual .EnVinay SharmaNo ratings yet
- ICEEMS14 - Proceedings PDFDocument666 pagesICEEMS14 - Proceedings PDFSanjanaKerkettaNo ratings yet
- Hybrid System Solutions Application GuideDocument21 pagesHybrid System Solutions Application Guidedbarron00No ratings yet
- OMRON Inverter PDFDocument64 pagesOMRON Inverter PDFМилован ЛазовићNo ratings yet
- Relays: Vacuum Gas-FilledDocument21 pagesRelays: Vacuum Gas-FilledMelike Subaşı - Elektrik Elektronik Mühendis adayıNo ratings yet
- GPC TechDataSheetDocument12 pagesGPC TechDataSheetGlenn AlbertNo ratings yet