You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- GPSC Lecturer EC 16-10-2016 PDFDocument30 pagesGPSC Lecturer EC 16-10-2016 PDFVaghela ChintanNo ratings yet
- Gujarat Organizations PDFDocument1 pageGujarat Organizations PDFVaghela ChintanNo ratings yet
- GPSC Class 1-2 Main Exam History 10-09-2016 PDFDocument4 pagesGPSC Class 1-2 Main Exam History 10-09-2016 PDFVaghela ChintanNo ratings yet
- Gujarat Awards PDFDocument4 pagesGujarat Awards PDFVaghela ChintanNo ratings yet
- Gujarat Import Exports PDFDocument1 pageGujarat Import Exports PDFVaghela ChintanNo ratings yet
- First Film in Various Languages PDFDocument1 pageFirst Film in Various Languages PDFVaghela ChintanNo ratings yet
- Gujarat Longest Highest Biggest Etc PDFDocument1 pageGujarat Longest Highest Biggest Etc PDFVaghela ChintanNo ratings yet
- Gujarat Newspapers Magazines PDFDocument1 pageGujarat Newspapers Magazines PDFVaghela ChintanNo ratings yet
- (XI) D (@! ' 0F: ?-&Z m8 (j.j.m8 ), (1950)Document3 pages(XI) D (@! ' 0F: ?-&Z m8 (j.j.m8 ), (1950)Vaghela ChintanNo ratings yet
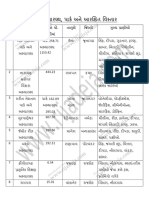
- Gujarat Abhyaran Park Arkshit Vistar PDFDocument3 pagesGujarat Abhyaran Park Arkshit Vistar PDFVaghela ChintanNo ratings yet
- Famous Krutio Karta PDFDocument2 pagesFamous Krutio Karta PDFVaghela ChintanNo ratings yet
- Famou Writers PDFDocument2 pagesFamou Writers PDFVaghela ChintanNo ratings yet
- Country Parliament Name PDFDocument2 pagesCountry Parliament Name PDFVaghela ChintanNo ratings yet
- Disease Reason Body Part PDFDocument1 pageDisease Reason Body Part PDFVaghela ChintanNo ratings yet
- Approximately Time-Optimal Fuzzy Control of Two-Tank System: Thomas Heckenthaler and Sebastian EngellDocument7 pagesApproximately Time-Optimal Fuzzy Control of Two-Tank System: Thomas Heckenthaler and Sebastian EngellVaghela ChintanNo ratings yet
- Real-Time Model Predictive Control of A Laboratory Liquid Tanks SystemDocument7 pagesReal-Time Model Predictive Control of A Laboratory Liquid Tanks SystemVaghela ChintanNo ratings yet
- Census 2011 India Gujarati PDFDocument6 pagesCensus 2011 India Gujarati PDFVaghela ChintanNo ratings yet
- Large Hadron CollierDocument41 pagesLarge Hadron CollierVaghela ChintanNo ratings yet
- Paper Multivariable Tank 0405131Document17 pagesPaper Multivariable Tank 0405131Vaghela ChintanNo ratings yet
- Linear IzationDocument16 pagesLinear Izationangori2No ratings yet
- J. Basic. Appl. Sci. Res., 2 (5) 5362-5373, 2012 PDFDocument12 pagesJ. Basic. Appl. Sci. Res., 2 (5) 5362-5373, 2012 PDFVaghela ChintanNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
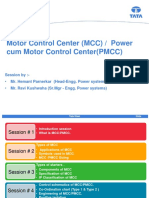
- 1 - PPT For MCC For Aets 2017Document50 pages1 - PPT For MCC For Aets 2017Harleen KaurNo ratings yet
- History and Working Principle of Solar CellsDocument4 pagesHistory and Working Principle of Solar Cellszamzul ariefNo ratings yet
- Basic Radio HandlingDocument26 pagesBasic Radio HandlingVlademir Geb Dubouzet100% (1)
- Abb - MS325Document9 pagesAbb - MS325MisliSlaluAdaNo ratings yet
- Penta-Band Antenna with 5 Integrated RCUsDocument2 pagesPenta-Band Antenna with 5 Integrated RCUsApitan Kongcharoen100% (1)
- WEG Regulador de Tensao Grt7 Th4 10040217 Manual Portugues BRDocument50 pagesWEG Regulador de Tensao Grt7 Th4 10040217 Manual Portugues BRJuan I. Meza Lozano100% (1)
- Control of Harmonics in 6-Pulse Rectifiers ThesisDocument116 pagesControl of Harmonics in 6-Pulse Rectifiers ThesisAlfredo Lopez CordovaNo ratings yet
- Data Aire Brochure Web Version v4Document4 pagesData Aire Brochure Web Version v4dnps2011No ratings yet
- Applying the commutator transformation C2 for synchronous machinesDocument8 pagesApplying the commutator transformation C2 for synchronous machinesAli AldesogeNo ratings yet
- 1000-400-933 - D-X8000 Light Source Service GuideDocument84 pages1000-400-933 - D-X8000 Light Source Service GuideHichem NaghmouchiNo ratings yet
- TD Docomo IntegrationDocument3 pagesTD Docomo IntegrationVishal SuryawaniNo ratings yet
- EMC quiz questionsDocument1 pageEMC quiz questionsSree MurthyNo ratings yet
- Cat Digital Voltage Regulator Manual: Read/DownloadDocument2 pagesCat Digital Voltage Regulator Manual: Read/DownloadBrian Jr Ruiz Alegre0% (1)
- Microwave Link Design - Nueva EcijaDocument79 pagesMicrowave Link Design - Nueva EcijaMark Vincent Fortaleza55% (11)
- Lightning Arrester Modeling Using Atp-Emtp: Trin Saengsuwan and Wichet ThipprasertDocument4 pagesLightning Arrester Modeling Using Atp-Emtp: Trin Saengsuwan and Wichet ThipprasertgumilarNo ratings yet
- Tutorial 3 VFD Motor AdvancedDocument20 pagesTutorial 3 VFD Motor AdvancedTrần Nguyên KhảiNo ratings yet
- Solar Power Procurement Related Issues Order-TNERC-16-10-2020Document47 pagesSolar Power Procurement Related Issues Order-TNERC-16-10-2020SRINIVASAN TNo ratings yet
- AC Circuits Knowledge Bank ExplainedDocument34 pagesAC Circuits Knowledge Bank ExplainedMalak SamirNo ratings yet
- G550 - MTM - App ADocument31 pagesG550 - MTM - App Astive100% (1)
- Technical Reference Manual: Protect Line Distance Protection Terminal REL 521 2.5Document426 pagesTechnical Reference Manual: Protect Line Distance Protection Terminal REL 521 2.5george_cpp2No ratings yet
- CYC1000 Training GuideDocument85 pagesCYC1000 Training GuideAngela RoblesNo ratings yet
- Technical Information Separable ConnectorsDocument32 pagesTechnical Information Separable Connectorsalmi yunusNo ratings yet
- Att.1 QT1-L-G-020-05-00003, KKS Numbering SystemDocument85 pagesAtt.1 QT1-L-G-020-05-00003, KKS Numbering SystemDoan Ngoc DucNo ratings yet
- Manual CL-3022WKDocument11 pagesManual CL-3022WKDario ZainNo ratings yet
- PM4018MUDocument11 pagesPM4018MUaldo_suviNo ratings yet
- Gearless Parameters MP-Fuji-ZA PDFDocument1 pageGearless Parameters MP-Fuji-ZA PDFCoil98No ratings yet
- 32N50C3 Mos PDFDocument11 pages32N50C3 Mos PDFHưng HQNo ratings yet
- SUL 181 h Analog Time Switch Under 40 CharactersDocument2 pagesSUL 181 h Analog Time Switch Under 40 CharactersMamas SanjayaNo ratings yet
- Ge300 PDFDocument100 pagesGe300 PDFAmsyari BakarNo ratings yet
- Microcontrollers - Chapter 02Document20 pagesMicrocontrollers - Chapter 02Mohammad K RadwanNo ratings yet