You might also like
- Nyquist Bode NicholsDocument22 pagesNyquist Bode NicholsanhnhamoiNo ratings yet
- LicenseDocument6 pagesLicenseevox777No ratings yet
- ch11 NewDocument74 pagesch11 NewshankarNo ratings yet
- Hanh Phuc LeDocument1 pageHanh Phuc LeanhnhamoiNo ratings yet
- FootprintDocument2 pagesFootprintanhnhamoiNo ratings yet
- Save FileDocument23 pagesSave FileanhnhamoiNo ratings yet
- Save FileDocument2,461 pagesSave FileanhnhamoiNo ratings yet
- Karnaugh For Counter DesignDocument2 pagesKarnaugh For Counter DesignanhnhamoiNo ratings yet
- Verbal - Advantage - 10 Easy Steps To A Powerful Vocabulary (Unabridged)Document489 pagesVerbal - Advantage - 10 Easy Steps To A Powerful Vocabulary (Unabridged)TanveerAli01No ratings yet
- ADocument1 pageAanhnhamoiNo ratings yet
- SaveDocument12 pagesSaveanhnhamoiNo ratings yet
- Trans Analysis1Document39 pagesTrans Analysis1anhnhamoiNo ratings yet
- English TutorialDocument1 pageEnglish TutorialanhnhamoiNo ratings yet
- DcopeDocument12 pagesDcopeanhnhamoiNo ratings yet
- SaveDocument1 pageSaveanhnhamoiNo ratings yet
- Minna No Nihongo - Mondai ScriptDocument60 pagesMinna No Nihongo - Mondai ScriptAlex84% (31)
- BooksDocument1 pageBooksanhnhamoiNo ratings yet
- OtlDocument18 pagesOtlanhnhamoiNo ratings yet
- ENGLISH WRITING SESSION ON THEMATIC DISTRIBUTIONDocument18 pagesENGLISH WRITING SESSION ON THEMATIC DISTRIBUTIONanhnhamoiNo ratings yet
- Vietnam Economic TimesDocument1 pageVietnam Economic TimesanhnhamoiNo ratings yet
- SMPSDocument6 pagesSMPSanhnhamoiNo ratings yet
- SWR - the persistent myth explainedDocument66 pagesSWR - the persistent myth explainedAliNo ratings yet
- Lec6 LNADocument33 pagesLec6 LNAanhnhamoiNo ratings yet
- ResearchDocument1 pageResearchanhnhamoiNo ratings yet
- Idct VDocument14 pagesIdct VanhnhamoiNo ratings yet
- Chapter 16Document53 pagesChapter 16morrisjrlNo ratings yet
- Noise in Solid-State Devices and LasersDocument29 pagesNoise in Solid-State Devices and LasersanhnhamoiNo ratings yet
- MesDocument1 pageMesanhnhamoiNo ratings yet
- Laplace Transforms and Circuit AnalysisDocument6 pagesLaplace Transforms and Circuit AnalysisanhnhamoiNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- B 3 Ga 012 ZDocument10 pagesB 3 Ga 012 Zgigel1980No ratings yet
- Magnetic Perovskites - Synthesis, Structure and Physical Properties-Springer India (2016)Document174 pagesMagnetic Perovskites - Synthesis, Structure and Physical Properties-Springer India (2016)Andrés Garzòn PosadaNo ratings yet
- A Two-Stage Isolated/Bidirectional DC/DC Converter With Current Ripple Reduction TechniqueDocument3 pagesA Two-Stage Isolated/Bidirectional DC/DC Converter With Current Ripple Reduction TechniqueariphineNo ratings yet
- Realization of Op-Amp as Integrator and DifferentiatorDocument3 pagesRealization of Op-Amp as Integrator and DifferentiatorNagendra KumarNo ratings yet
- Ampli 500W Manual For FM AmplifierierDocument66 pagesAmpli 500W Manual For FM Amplifierierkruna123No ratings yet
- Microcontroller Projects Digital Voting Using Pic MicrocontrollerDocument3 pagesMicrocontroller Projects Digital Voting Using Pic MicrocontrollerAbdullah Omar NasifNo ratings yet
- User Manual TV Power Demoboard TEA8818DB1440: TEA8818 + TEA1995 130W 13V and 90V Power SupplyDocument29 pagesUser Manual TV Power Demoboard TEA8818DB1440: TEA8818 + TEA1995 130W 13V and 90V Power SupplyCube7 Geronimo50% (2)
- PI8000 Frequency Inverter User ManualDocument187 pagesPI8000 Frequency Inverter User ManualLuis StevensNo ratings yet
- Dr. B.justus RabiDocument6 pagesDr. B.justus Rabianon_842868788No ratings yet
- Effects of Stress and Depolarization On Electrical Behaviors of Ferroelectric Field-Effect TransistorDocument3 pagesEffects of Stress and Depolarization On Electrical Behaviors of Ferroelectric Field-Effect TransistordabalejoNo ratings yet
- Memorex MT2206 TV Service ManualDocument64 pagesMemorex MT2206 TV Service ManualMalcolm RockNo ratings yet
- EC GATE 2017 Set I Key SolutionDocument21 pagesEC GATE 2017 Set I Key SolutionJeevan Sai MaddiNo ratings yet
- The ARM ProcessorDocument24 pagesThe ARM ProcessorJinto Chacko Mathew100% (2)
- A Low Voltage To High Voltage Level Shifter Circuit For MEMS Application PDFDocument4 pagesA Low Voltage To High Voltage Level Shifter Circuit For MEMS Application PDFoht993No ratings yet
- Polyhouse Automation1Document23 pagesPolyhouse Automation1Chaitanya GajbhiyeNo ratings yet
- Important MCQ on VLSI Design Logic Gates and CMOS TechnologyDocument4 pagesImportant MCQ on VLSI Design Logic Gates and CMOS TechnologyAkanksha DixitNo ratings yet
- Al2O3 Material Properties GuideDocument3 pagesAl2O3 Material Properties GuideRing MasterNo ratings yet
- CKG7507Document9 pagesCKG7507api-3800166No ratings yet
- VLSI Technology Course PlanDocument4 pagesVLSI Technology Course PlanMahendra BabuNo ratings yet
- User'S Manual: MODEL: MMA160/200Document9 pagesUser'S Manual: MODEL: MMA160/200Vlaovic GoranNo ratings yet
- FPGADocument122 pagesFPGANishit Gupta100% (2)
- Button debouncing explained in detailDocument2 pagesButton debouncing explained in detailAndrei Linca-TorjeNo ratings yet
- LDMOS Power Modules for Two-Way Mobile RadiosDocument14 pagesLDMOS Power Modules for Two-Way Mobile RadiosPhạm TuyểnNo ratings yet
- Tonio Buonassisi Associate Professor of Mechanical Engineering Thesis SupervisorDocument59 pagesTonio Buonassisi Associate Professor of Mechanical Engineering Thesis SupervisorMINH NGUYỄN THẾNo ratings yet
- This Test Contains A Total of 15 Objective Type Questions. Each Question Carries 1 Mark. There Is NO NEGATIVE MarkingDocument10 pagesThis Test Contains A Total of 15 Objective Type Questions. Each Question Carries 1 Mark. There Is NO NEGATIVE MarkingvarunkohliinNo ratings yet
- Mighty Press Hat PressDocument9 pagesMighty Press Hat PressJudy NeenaNo ratings yet
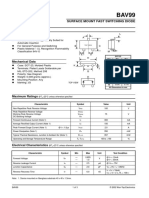
- Features: Surface Mount Fast Switching DiodeDocument4 pagesFeatures: Surface Mount Fast Switching DiodeDe faNo ratings yet
- Slag Attack Mag CarbDocument12 pagesSlag Attack Mag CarbAnindya RoyNo ratings yet
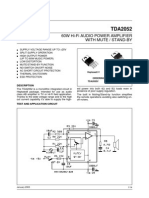
- 2052Document15 pages2052electroramos2011No ratings yet
- ABB's Comprehensive Range of LV Control ProductsDocument79 pagesABB's Comprehensive Range of LV Control Productsfairoos aliNo ratings yet