You might also like
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Adaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethDocument7 pagesAdaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethIJERDNo ratings yet
- Performance Analysis of LMS & NLMS Algorithms For Noise CancellationDocument4 pagesPerformance Analysis of LMS & NLMS Algorithms For Noise CancellationijsretNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Echo Cancellation Algorithms Using Adaptive Filters: A Comparative StudyDocument8 pagesEcho Cancellation Algorithms Using Adaptive Filters: A Comparative StudyidescitationNo ratings yet
- Digital Spectral Analysis MATLAB® Software User GuideFrom EverandDigital Spectral Analysis MATLAB® Software User GuideNo ratings yet
- LMS and RLS Based Adaptive Filter Design For Different SignalsDocument5 pagesLMS and RLS Based Adaptive Filter Design For Different SignalsijeteeditorNo ratings yet
- Noise Cancellation Using Sign-Data LMS AlgorithmDocument6 pagesNoise Cancellation Using Sign-Data LMS AlgorithmMarcelo VilcaNo ratings yet
- Applications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezDocument19 pagesApplications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezguyoaserNo ratings yet
- Cascaded LmsDocument25 pagesCascaded LmsAkilesh MDNo ratings yet
- FPGA Implementation of Noise Cancellation Using RLS Adaptive FilterDocument8 pagesFPGA Implementation of Noise Cancellation Using RLS Adaptive FilterLuis Oliveira SilvaNo ratings yet
- Adaptive Filter DesignDocument5 pagesAdaptive Filter DesignHariNathNo ratings yet
- Mehta Vidhi (4102) Mistry Nitisha (4105) Patel Dhruvi (4118)Document34 pagesMehta Vidhi (4102) Mistry Nitisha (4105) Patel Dhruvi (4118)Himani LokhandeNo ratings yet
- Adaptive Digital FiltersDocument10 pagesAdaptive Digital Filtersfantastic05No ratings yet
- European Journal Article on Improved LMS AlgorithmDocument5 pagesEuropean Journal Article on Improved LMS AlgorithmBENZIANE MouradNo ratings yet
- Version 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering AlgorithmsDocument7 pagesVersion 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering Algorithmstayyabkhan00No ratings yet
- Dcs Project1Document13 pagesDcs Project1Sujeet KumarNo ratings yet
- Sipij 040304Document12 pagesSipij 040304sipijNo ratings yet
- RLS Algorithm Adaptive FilterDocument15 pagesRLS Algorithm Adaptive Filterniranjan_meharNo ratings yet
- Volterra LMS AbstractDocument5 pagesVolterra LMS AbstractDevanjan MaitiNo ratings yet
- Major ProjectDocument19 pagesMajor ProjectAnkita KumariNo ratings yet
- Adaptive FilterDocument47 pagesAdaptive Filterking khanNo ratings yet
- Echo Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoDocument25 pagesEcho Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoÈmøñ AlesandЯo KhanNo ratings yet
- Analysis and Simulation of System Identification Based On LMS Adaptive Filtering AlgorithmDocument5 pagesAnalysis and Simulation of System Identification Based On LMS Adaptive Filtering AlgorithmSEP-PublisherNo ratings yet
- Hardware Implementation of Adaptive Noise Cancellation Over DSP Kit TMS320C6713Document12 pagesHardware Implementation of Adaptive Noise Cancellation Over DSP Kit TMS320C6713AI Coordinator - CSC JournalsNo ratings yet
- A Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingDocument5 pagesA Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingArash TorkamanNo ratings yet
- Springer 1Document7 pagesSpringer 1Dimple BansalNo ratings yet
- ANC System For Noisy SpeechDocument9 pagesANC System For Noisy SpeechsipijNo ratings yet
- Echo Cancellation Using LMS AlgorithmDocument5 pagesEcho Cancellation Using LMS AlgorithmPrabira Kumar SethyNo ratings yet
- Noise Canceling in Audio Signal With Adaptive FilterDocument6 pagesNoise Canceling in Audio Signal With Adaptive FilterDiệp Xuân NamNo ratings yet
- Echo Cancellation in Audio Signal Using LMS AlgorithmDocument6 pagesEcho Cancellation in Audio Signal Using LMS AlgorithmVa SuNo ratings yet
- Performance Analysis of Adaptive Noise Cancellation by Using AlgorithmsDocument7 pagesPerformance Analysis of Adaptive Noise Cancellation by Using Algorithmshaider aliNo ratings yet
- VHDL Noise CancellerDocument8 pagesVHDL Noise Cancellert.sin48100% (1)
- MyDocument25 pagesMyRakesh PogulaNo ratings yet
- System Identification Using MATLABDocument37 pagesSystem Identification Using MATLABMarwan Elmahdi89% (9)
- Reprort On Adaptive Filter 1Document38 pagesReprort On Adaptive Filter 1Hachem ElyousfiNo ratings yet
- Echo Cancellation Using The Lms AlgorithmDocument8 pagesEcho Cancellation Using The Lms AlgorithmVương Công ĐịnhNo ratings yet
- Adaptive Filter Application in Echo Cancellation System and Implementation Using FPGADocument13 pagesAdaptive Filter Application in Echo Cancellation System and Implementation Using FPGAZeyad Tareq Al SaroriNo ratings yet
- P1 IntroDocument35 pagesP1 IntroPARTHA BANERJEENo ratings yet
- Design Realization and PerformanceDocument10 pagesDesign Realization and PerformancesipijNo ratings yet
- Hardware Implementation of Speech Enhancement AlgorithmsDocument3 pagesHardware Implementation of Speech Enhancement AlgorithmsijsretNo ratings yet
- Noise Cancelation Using Adaptive FiltersDocument21 pagesNoise Cancelation Using Adaptive FiltersZaraShahNo ratings yet
- Adaptive Noise CancellerDocument9 pagesAdaptive Noise CancellerThomas mortonNo ratings yet
- Matlab Simulation of Cordic Based Adaptive Filtering For Noise Reduction Using Sensors ArrayDocument6 pagesMatlab Simulation of Cordic Based Adaptive Filtering For Noise Reduction Using Sensors ArrayMohamed GanounNo ratings yet
- Anexo 2 - Plantilla IEEEDocument7 pagesAnexo 2 - Plantilla IEEEeduar Martelo SierraNo ratings yet
- Adaptive Equalization: Oladapo KayodeDocument17 pagesAdaptive Equalization: Oladapo KayodeM.Ganesh Kumar mahendrakarNo ratings yet
- Design and Implementation of Adaptive Filtering Algorithm For Noise Cancellation of Speech Signal On Fpga For Hearing AidDocument27 pagesDesign and Implementation of Adaptive Filtering Algorithm For Noise Cancellation of Speech Signal On Fpga For Hearing AidVaisakh SugathanNo ratings yet
- Laboratory 3 Digital Filter DesignDocument8 pagesLaboratory 3 Digital Filter DesignModitha LakshanNo ratings yet
- Hardware Implementation of Adaptive System Identification: Kusha TyagiDocument4 pagesHardware Implementation of Adaptive System Identification: Kusha TyagierpublicationNo ratings yet
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringDocument7 pagesIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Battle Field Speech Enhancement Using An Efficient Unbiased Adaptive Filtering TechniqueDocument5 pagesBattle Field Speech Enhancement Using An Efficient Unbiased Adaptive Filtering Techniqueeditor9891No ratings yet
- Progress ReportDocument17 pagesProgress Reportkavita gangwarNo ratings yet
- Sirisha Kurakula G00831237 ProjectDocument12 pagesSirisha Kurakula G00831237 ProjectSirisha Kurakula0% (1)
- What Is Adaptive Signal ProcessingDocument16 pagesWhat Is Adaptive Signal Processingderresesolomon36No ratings yet
- Adaptive Filter Analysis Using AlgorithmsDocument7 pagesAdaptive Filter Analysis Using AlgorithmsgantayatNo ratings yet
- Adaptive FilterDocument35 pagesAdaptive FilterSimranjeet Singh100% (2)
- EC 614: Adaptive Signal Processing Techniques: Course Instructor: Dr. Debashis GhoshDocument56 pagesEC 614: Adaptive Signal Processing Techniques: Course Instructor: Dr. Debashis GhoshUtkarsh GuptaNo ratings yet
- A Review of Active Noise Control AlgorithmsDocument5 pagesA Review of Active Noise Control AlgorithmsPiper OntuNo ratings yet
- Reed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003Document20 pagesReed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003jayant5253100% (1)
- 8.3.1 CPM SignalsDocument7 pages8.3.1 CPM SignalsAli KashiNo ratings yet
- Day2 03Document31 pagesDay2 03Ali KashiNo ratings yet
- Study Spread Spectrum in Matlab: Wang XiaoyingDocument4 pagesStudy Spread Spectrum in Matlab: Wang XiaoyingAli KashiNo ratings yet
- Discrete Time PrimerDocument5 pagesDiscrete Time PrimerarafatasgharNo ratings yet
- N5615 1Document31 pagesN5615 1Ali KashiNo ratings yet
- Introduction To Spread Spectrum CommunicationDocument7 pagesIntroduction To Spread Spectrum CommunicationAli KashiNo ratings yet
- Fast MATLAB Optimization GuideDocument22 pagesFast MATLAB Optimization GuideJandfor Tansfg ErrottNo ratings yet
- 3 1 75 JiscDocument4 pages3 1 75 JiscAli KashiNo ratings yet
- Study Spread Spectrum in Matlab: Wang XiaoyingDocument4 pagesStudy Spread Spectrum in Matlab: Wang XiaoyingAli KashiNo ratings yet
- Day2 03Document31 pagesDay2 03Ali KashiNo ratings yet
- An Introduction To Spread-Spectrum CommunicationsDocument12 pagesAn Introduction To Spread-Spectrum CommunicationsAli KashiNo ratings yet
- Handoff Schemes For Vehicular Ad-Hoc Networks:: A SurveyDocument6 pagesHandoff Schemes For Vehicular Ad-Hoc Networks:: A SurveyAli KashiNo ratings yet
- Researchpaper Safe Geo Graphic Location Privacy Scheme in The VANETs Survey Methods and Its LimitationDocument5 pagesResearchpaper Safe Geo Graphic Location Privacy Scheme in The VANETs Survey Methods and Its LimitationAli KashiNo ratings yet
- 2013-Graph-Based Metrics For Insider Attack Detection in VANET Multihop Data Dissemination Protocols PDFDocument14 pages2013-Graph-Based Metrics For Insider Attack Detection in VANET Multihop Data Dissemination Protocols PDFAli KashiNo ratings yet
- A MATLAB Tutorial: Ed Overman Department of Mathematics The Ohio State UniversityDocument182 pagesA MATLAB Tutorial: Ed Overman Department of Mathematics The Ohio State UniversityAli KashiNo ratings yet
- Reed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003Document20 pagesReed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003jayant5253100% (1)
- Supp Mat L Absolvo P TimDocument4 pagesSupp Mat L Absolvo P TimAli KashiNo ratings yet
- Reed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003Document20 pagesReed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003jayant5253100% (1)
- Coding Theory A First CourseDocument198 pagesCoding Theory A First CourseAilenei RamonaNo ratings yet
- Build A Custom-Printed Circuit Board: Pcbs Aren'T So Hard To Make and Needn'T Break The BankDocument2 pagesBuild A Custom-Printed Circuit Board: Pcbs Aren'T So Hard To Make and Needn'T Break The BankAli KashiNo ratings yet
- Robin PDFDocument13 pagesRobin PDFAli KashiNo ratings yet
- DC Motor ModellingDocument8 pagesDC Motor ModellingAbubakar MannNo ratings yet
- Reed MulerDocument6 pagesReed MulerPankaj GoyalNo ratings yet
- Build A Custom-Printed Circuit Board: Pcbs Aren'T So Hard To Make and Needn'T Break The BankDocument2 pagesBuild A Custom-Printed Circuit Board: Pcbs Aren'T So Hard To Make and Needn'T Break The BankAli KashiNo ratings yet
- Experiments in Teaching An Engaging and Demystifying Introduction PDFDocument10 pagesExperiments in Teaching An Engaging and Demystifying Introduction PDFAli KashiNo ratings yet
- Direct-write Process 3D Transistors Without LithographyDocument1 pageDirect-write Process 3D Transistors Without LithographyAli KashiNo ratings yet
- Shannon Coding Extensions PDFDocument139 pagesShannon Coding Extensions PDFAli KashiNo ratings yet
- Shannon Coding Extensions PDFDocument139 pagesShannon Coding Extensions PDFAli KashiNo ratings yet
- Mainboard p4845glmDocument34 pagesMainboard p4845glmHo Thanh BinhNo ratings yet
- City". We Implemented Using PIC Microcontroller and RF ModuleDocument56 pagesCity". We Implemented Using PIC Microcontroller and RF ModuleSai RakeshNo ratings yet
- Ricoh Aficio 2015 BrochureDocument6 pagesRicoh Aficio 2015 BrochureGAPATMNo ratings yet
- Optimization of DRX Parameter For PowerDocument4 pagesOptimization of DRX Parameter For PowerPedro VangriekenNo ratings yet
- TCD Codes for Si210 Elevator Door TroubleshootingDocument16 pagesTCD Codes for Si210 Elevator Door TroubleshootingFERNS100% (1)
- Am Monitors Headphones12Document40 pagesAm Monitors Headphones12dejan89npNo ratings yet
- T1004M6R012Document1 pageT1004M6R012АлександрNo ratings yet
- Compact 2500W FM Transmitter With Reliable DesignDocument1 pageCompact 2500W FM Transmitter With Reliable DesignBryan CustodioNo ratings yet
- FAQ RegistrationDocument22 pagesFAQ RegistrationSyed MisbahuddinNo ratings yet
- Installing and Using the ASA 214 Antenna SplitterDocument16 pagesInstalling and Using the ASA 214 Antenna Splitterlonestar StarNo ratings yet
- XMP1: 16 Slot Subrack of The Modular Multi-Service Access SystemDocument4 pagesXMP1: 16 Slot Subrack of The Modular Multi-Service Access SystemAissaNo ratings yet
- Sonavu Acoustic Imaging Camera: Ultrasound Solu OnsDocument2 pagesSonavu Acoustic Imaging Camera: Ultrasound Solu OnsjimNo ratings yet
- Accenture - Sustaining Success in The Digital Era - The New Challenge For CableDocument16 pagesAccenture - Sustaining Success in The Digital Era - The New Challenge For CableAndrey PritulyukNo ratings yet
- Ac Single PhaseDocument35 pagesAc Single PhaseBerihun EngdaNo ratings yet
- Microchip PeripheralsDocument8 pagesMicrochip PeripheralsAlejandro MufardiniNo ratings yet
- Tyco RelaysguideDocument11 pagesTyco Relaysguidejaysingh12No ratings yet
- Datasheet PDFDocument3 pagesDatasheet PDFpichon1No ratings yet
- Part List: MechanicalDocument12 pagesPart List: MechanicalshinigamiburakkuNo ratings yet
- ODA-150 Towards A More Generic Slice Template GST - 5GROTS CatalystDocument19 pagesODA-150 Towards A More Generic Slice Template GST - 5GROTS CatalystAndrea StefanelliNo ratings yet
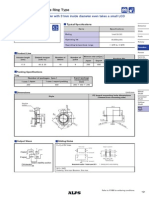
- 50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDDocument3 pages50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDshyhuNo ratings yet
- Everything: You Need To KnowDocument3 pagesEverything: You Need To KnowAndrew RossNo ratings yet
- Stick Diagram and Layout DiagramDocument56 pagesStick Diagram and Layout DiagramRavi BellubbiNo ratings yet
- Lab 1 ReportDocument12 pagesLab 1 ReportHarining TyasNo ratings yet
- G2YM400VL20Document4 pagesG2YM400VL20luis gonzalezNo ratings yet
- Accurately measure long distances with the NTS-660LCl660RC total stationDocument2 pagesAccurately measure long distances with the NTS-660LCl660RC total stationabdulNo ratings yet
- DSP Lab # 8 Sampling in Time Domain: QuestionsDocument3 pagesDSP Lab # 8 Sampling in Time Domain: QuestionsnoumanNo ratings yet
- Elektronik Lab ReportDocument12 pagesElektronik Lab ReportoliverNo ratings yet
- DZ126IN: Complete Train ControlDocument12 pagesDZ126IN: Complete Train ControlGuillopNo ratings yet
- Symo GEN24 Full Backup2Document172 pagesSymo GEN24 Full Backup2Mihai RaduNo ratings yet
- XZone Service Manual 1.2Document20 pagesXZone Service Manual 1.2Abraham BongòNo ratings yet
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNo ratings yet
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- CCST Cisco Certified Support Technician Study Guide: Networking ExamFrom EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamNo ratings yet