You might also like
- Mathematical Biology: Jeffrey R. ChasnovDocument119 pagesMathematical Biology: Jeffrey R. ChasnovdrkapilkohliNo ratings yet
- Landmark Experiments in Twentieth-Century PhysicsFrom EverandLandmark Experiments in Twentieth-Century PhysicsRating: 3 out of 5 stars3/5 (1)
- Resonance Magazine, March 1996Document127 pagesResonance Magazine, March 1996Kiran Kumar KuppaNo ratings yet
- Graphs and Tables of the Mathieu Functions and Their First DerivativesFrom EverandGraphs and Tables of the Mathieu Functions and Their First DerivativesNo ratings yet
- Slater, J.C. SOLID-STATE AND MOLECULAR THEORY GROUP. MIT. Technical Report No. 3. Electronic Structur of Atoms and Molecules. 1953. 38.7MB PDFDocument217 pagesSlater, J.C. SOLID-STATE AND MOLECULAR THEORY GROUP. MIT. Technical Report No. 3. Electronic Structur of Atoms and Molecules. 1953. 38.7MB PDFAlf Seg100% (1)
- Bose Einstein CondensateDocument10 pagesBose Einstein Condensatejoeloduro9320No ratings yet
- Entropy: Applications of Entropy in Finance: A ReviewDocument23 pagesEntropy: Applications of Entropy in Finance: A ReviewArthur DuxNo ratings yet
- Introduction to Group Theory with Applications: Materials Science and TechnologyFrom EverandIntroduction to Group Theory with Applications: Materials Science and TechnologyRating: 1 out of 5 stars1/5 (1)
- Application of Lie-Group Symmetry AnalysisDocument35 pagesApplication of Lie-Group Symmetry Analysiscatfan42No ratings yet
- Double Pendulum PDFDocument7 pagesDouble Pendulum PDFshalukprNo ratings yet
- Max-Von-Laue-1911-Artigo-On The Dynamics of The Theory of Relativity - Wikisource, The Free Online LibraryDocument12 pagesMax-Von-Laue-1911-Artigo-On The Dynamics of The Theory of Relativity - Wikisource, The Free Online Libraryroberto-martinsNo ratings yet
- Calculating Arakawa JacobianDocument3 pagesCalculating Arakawa Jacobianmak112005gmailNo ratings yet
- Lecture Notes On Numerical Methods For Differential EquationsDocument146 pagesLecture Notes On Numerical Methods For Differential Equationschen ziyaoNo ratings yet
- Structure and Interpretation of Classical MechanicsDocument427 pagesStructure and Interpretation of Classical MechanicsGerman Toledo100% (1)
- Steve Bryson - Virtual Spacetime: An Environment For The Visualization of Curved Spacetimes Via Geodesic FlowsDocument17 pagesSteve Bryson - Virtual Spacetime: An Environment For The Visualization of Curved Spacetimes Via Geodesic FlowsUtnyu100% (1)
- Lamb Shift Presentation For LeymanDocument18 pagesLamb Shift Presentation For LeymanUtkarshPatel100% (1)
- Mathematics For Physicists: Introductory Concepts and MethodsDocument145 pagesMathematics For Physicists: Introductory Concepts and Methodsvic1234059100% (1)
- Spinning Top With Constant Precession and Zero NutationDocument3 pagesSpinning Top With Constant Precession and Zero NutationMTNo ratings yet
- Science The Endless FrontierDocument130 pagesScience The Endless FrontierAquariusNo ratings yet
- Jaan Kalda - Physics Olympiad NotesDocument245 pagesJaan Kalda - Physics Olympiad Noteslash73752No ratings yet
- Langevin and Fokker-Planck Equations and Their Generalizations Descriptions and Solutions (Sau Fa Kwok)Document208 pagesLangevin and Fokker-Planck Equations and Their Generalizations Descriptions and Solutions (Sau Fa Kwok)Gunnar CalvertNo ratings yet
- Helgason - Sophus Lie, The MathematicianDocument19 pagesHelgason - Sophus Lie, The MathematicianZow Niak100% (1)
- Disessa 1979 - LearnabilityDocument42 pagesDisessa 1979 - Learnabilitypratim1No ratings yet
- Cats Are Not PeaDocument294 pagesCats Are Not PeaMirabella AstraNo ratings yet
- Entropy Optimization Parameter EstimationDocument64 pagesEntropy Optimization Parameter EstimationPabloMartinGechiNo ratings yet
- Quantum Mechanics For EngineersDocument1,453 pagesQuantum Mechanics For EngineersTrain_7113No ratings yet
- P-Adic Hodge Theory (Brinon and Conrad)Document290 pagesP-Adic Hodge Theory (Brinon and Conrad)ElleNo ratings yet
- The Conservation of Orbital Symmetry PDFDocument6 pagesThe Conservation of Orbital Symmetry PDFKaren Viviana Londono GordilloNo ratings yet
- Gallavotti Statistical MechanicsDocument359 pagesGallavotti Statistical MechanicsgerosaNo ratings yet
- The Gravitational Three-Body ProblemDocument23 pagesThe Gravitational Three-Body ProblemBrent MasonNo ratings yet
- Kittel Thermal PhyscisDocument51 pagesKittel Thermal PhyscisEric StandardNo ratings yet
- Chapter 10 The Singular Value DecompositionDocument49 pagesChapter 10 The Singular Value DecompositionHasna LabibahNo ratings yet
- For A More Accessible and Less Technical Introduction To This Topic, SeeDocument34 pagesFor A More Accessible and Less Technical Introduction To This Topic, SeeAb'l G'orgeNo ratings yet
- Quantum Mechanics - Taylor PDFDocument7 pagesQuantum Mechanics - Taylor PDFmladenNo ratings yet
- Euler Master Us All PDFDocument2 pagesEuler Master Us All PDFBenNo ratings yet
- Fermat's Little Theorem (Some Proofs)Document12 pagesFermat's Little Theorem (Some Proofs)Soumyajit PradhanNo ratings yet
- List of Unsolved Problems in PhysicsDocument9 pagesList of Unsolved Problems in Physicslev76No ratings yet
- Introduction To Functional Analysis - Goetz GrammelDocument33 pagesIntroduction To Functional Analysis - Goetz GrammelLaura RadoiNo ratings yet
- Lecture Notes On Dynamical Systems, Chaos and Fractal GeometryDocument272 pagesLecture Notes On Dynamical Systems, Chaos and Fractal GeometryAC_AderemiNo ratings yet
- Selected Works of A N Kolmogorov 1991Document568 pagesSelected Works of A N Kolmogorov 1991Veli Can CosarNo ratings yet
- Differentialequations, Dynamicalsystems, and Anintroduction TochaosDocument416 pagesDifferentialequations, Dynamicalsystems, and Anintroduction TochaoszhangwenNo ratings yet
- JMathPhys 31 725 (Lee and Wald)Document19 pagesJMathPhys 31 725 (Lee and Wald)Juan PerezNo ratings yet
- A Primer of Infinitesimal Analysis - PortadaDocument4 pagesA Primer of Infinitesimal Analysis - Portadarelax999No ratings yet
- Quantum Field Theory in Curved SpacetimeDocument18 pagesQuantum Field Theory in Curved SpacetimeAdriano Braga BarretoNo ratings yet
- Critical Analysis of The Critique of The Claim of Propeller-Assisted Straight-Downwind Land Sailing Faster Than WindDocument19 pagesCritical Analysis of The Critique of The Claim of Propeller-Assisted Straight-Downwind Land Sailing Faster Than WindFavio Alejandro Herrera ZapataNo ratings yet
- Factorization Method in Quantum Mechanics - Shi-Hai DongDocument308 pagesFactorization Method in Quantum Mechanics - Shi-Hai DongUlises Marmolejo100% (1)
- Kerr's Black HolesDocument20 pagesKerr's Black HolesABC DEF100% (1)
- Tensors, Contravariant and CovariantDocument10 pagesTensors, Contravariant and CovariantmarceloNo ratings yet
- Fermat-Catalan ConjectureDocument3 pagesFermat-Catalan ConjecturecatalinatorreNo ratings yet
- E The Master of AllDocument12 pagesE The Master of AllchungNo ratings yet
- Coleman WeinbergDocument23 pagesColeman WeinbergKostas Roubedakis100% (1)
- The Light-Cone ApproachDocument38 pagesThe Light-Cone ApproachSarthakNo ratings yet
- Hans J. Herrmann, Lucas Böttcher - Computational StatisticalDocument273 pagesHans J. Herrmann, Lucas Böttcher - Computational StatisticalGJobs100% (1)
- Answer Key 2Document41 pagesAnswer Key 2jara ubbus100% (1)
- Jones CalculusDocument4 pagesJones Calculusxob97No ratings yet
- Primes and RiemannDocument9 pagesPrimes and RiemanndiallomailNo ratings yet
- Neurotoxicology and Teratology: Full Length ArticleDocument7 pagesNeurotoxicology and Teratology: Full Length ArticlepasomagaNo ratings yet
- L21 Advanced TopicsDocument43 pagesL21 Advanced TopicspasomagaNo ratings yet
- HW 8Document1 pageHW 8pasomagaNo ratings yet
- Duchi 16Document88 pagesDuchi 16pasomagaNo ratings yet
- Array-Based GNSS Signal Tracking With A Reduced State Signal ModelDocument17 pagesArray-Based GNSS Signal Tracking With A Reduced State Signal ModelpasomagaNo ratings yet
- Deep Learning For Direct Hybrid Precoding in Millimeter Wave Massive MIMO SystemsDocument7 pagesDeep Learning For Direct Hybrid Precoding in Millimeter Wave Massive MIMO SystemspasomagaNo ratings yet
- Green Small Cell Operation of Ultra-Dense Networks Using Device AssistanceDocument19 pagesGreen Small Cell Operation of Ultra-Dense Networks Using Device AssistancepasomagaNo ratings yet
- Encyclopedia of Slavery in The United States PDFDocument910 pagesEncyclopedia of Slavery in The United States PDFpasomagaNo ratings yet
- Beyond The Kalman FilterParticle Filters For Tracking ApplicationsDocument47 pagesBeyond The Kalman FilterParticle Filters For Tracking Applicationsnodidino100% (1)
- Encyclopedia of Slavery in The United States PDFDocument910 pagesEncyclopedia of Slavery in The United States PDFpasomagaNo ratings yet
- Data-Driven Baseline Estimation of Residential Buildings For Demand ResponseDocument21 pagesData-Driven Baseline Estimation of Residential Buildings For Demand ResponsepasomagaNo ratings yet
- Machine Learning Assignment 1 Basic Concepts: Due: 27 March 2015, 15:00pmDocument3 pagesMachine Learning Assignment 1 Basic Concepts: Due: 27 March 2015, 15:00pmpasomagaNo ratings yet
- Lecture 1Document28 pagesLecture 1Kamara KumaraNo ratings yet
- 1Document25 pages1pasomagaNo ratings yet
- Nonparametric Belief Propagation For Self-Localization of Sensor NetworksDocument11 pagesNonparametric Belief Propagation For Self-Localization of Sensor NetworkspasomagaNo ratings yet
- Complex DiffDocument2 pagesComplex DiffpasomagaNo ratings yet
- Introduction To Percolation TheoryDocument21 pagesIntroduction To Percolation TheorypasomagaNo ratings yet
- A Distributed Auction Algorithm For The Assignment ProblemDocument6 pagesA Distributed Auction Algorithm For The Assignment ProblempasomagaNo ratings yet
- WinEdt Cannot Work With Acrobat Reader 10 (X) Whole TextDocument3 pagesWinEdt Cannot Work With Acrobat Reader 10 (X) Whole TextpasomagaNo ratings yet
- Growth, Percolation, and Correlations in Disordered Fiber NetworksDocument29 pagesGrowth, Percolation, and Correlations in Disordered Fiber NetworkspasomagaNo ratings yet
- Energy Systems Integration 101Document86 pagesEnergy Systems Integration 101pasomagaNo ratings yet
- Introduction To PercolationDocument25 pagesIntroduction To Percolationpasomaga100% (1)
- The MagPi Issue 1 - Raspberry PiDocument32 pagesThe MagPi Issue 1 - Raspberry PiJames BatemanNo ratings yet
- MMC Overview: For Class Use Only Do Not DistributeDocument37 pagesMMC Overview: For Class Use Only Do Not DistributepasomagaNo ratings yet
- Balanced Outcomes in Social Exchange NetworksDocument10 pagesBalanced Outcomes in Social Exchange NetworkspasomagaNo ratings yet
- Proof of The Cofactor Expansion Theorem 1Document13 pagesProof of The Cofactor Expansion Theorem 1pasomagaNo ratings yet
- A Survey of Wireless Communication Using Visible LightDocument10 pagesA Survey of Wireless Communication Using Visible LightpasomagaNo ratings yet
- A Cooperation Strategy Based On Nash Bargaining Solution in Cooperative Relay NetworksDocument8 pagesA Cooperation Strategy Based On Nash Bargaining Solution in Cooperative Relay NetworkspasomagaNo ratings yet
- SrsDocument7 pagesSrsRahul Malhotra50% (2)
- Read The Text and Answer The QuestionsDocument5 pagesRead The Text and Answer The QuestionsDanny RuedaNo ratings yet
- Bajaj Allianz General Insurance CompanyDocument4 pagesBajaj Allianz General Insurance Companysarath potnuriNo ratings yet
- Indiana Property Tax Benefits: (This Form Must Be Printed On Gold or Yellow Paper)Document2 pagesIndiana Property Tax Benefits: (This Form Must Be Printed On Gold or Yellow Paper)abramsdcNo ratings yet
- Engineering Economics1Document64 pagesEngineering Economics1bala saiNo ratings yet
- Updated PDPDocument540 pagesUpdated PDPnikulaaaasNo ratings yet
- Revised Study Material - Economics ChandigarhDocument159 pagesRevised Study Material - Economics ChandigarhvishaljalanNo ratings yet
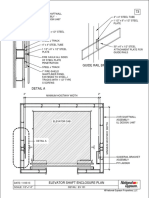
- Guide Rail Bracket AssemblyDocument1 pageGuide Rail Bracket AssemblyPrasanth VarrierNo ratings yet
- Esp-2000 BSDocument6 pagesEsp-2000 BSByron LopezNo ratings yet
- France 10-Day ItineraryDocument3 pagesFrance 10-Day ItineraryYou goabroadNo ratings yet
- Mechanical Power FormulaDocument9 pagesMechanical Power FormulaEzeBorjesNo ratings yet
- D-Dimer DZ179A Parameters On The Beckman AU680 Rev. ADocument1 pageD-Dimer DZ179A Parameters On The Beckman AU680 Rev. AAlberto MarcosNo ratings yet
- Med Error PaperDocument4 pagesMed Error Paperapi-314062228100% (1)
- CHAPTER I KyleDocument13 pagesCHAPTER I KyleCresiel Pontijon100% (1)
- Gulf Case Study SolnDocument9 pagesGulf Case Study SolnHarsh SNo ratings yet
- E34-1 Battery Charging and Dishcharging BoardDocument23 pagesE34-1 Battery Charging and Dishcharging BoardGanesa MurthyNo ratings yet
- Preprints201808 0216 v1Document15 pagesPreprints201808 0216 v1Baptista Jaime MilioneNo ratings yet
- TMIS07 - Kalam Internship - S7 Tesla MindsDocument3 pagesTMIS07 - Kalam Internship - S7 Tesla MindsDMJ JonesNo ratings yet
- VHP Series Five P9394Gsi S5: With Esm2 and Empact Emission Control SystemDocument2 pagesVHP Series Five P9394Gsi S5: With Esm2 and Empact Emission Control SystemGabrielito PachacamaNo ratings yet
- Trandsend 2Document3 pagesTrandsend 2dadiNo ratings yet
- Antibiotic I and II HWDocument4 pagesAntibiotic I and II HWAsma AhmedNo ratings yet
- User Manual - Wellwash ACDocument99 pagesUser Manual - Wellwash ACAlexandrNo ratings yet
- Chapter 5 - Shear and Diagonal Tension On Beams PDFDocument55 pagesChapter 5 - Shear and Diagonal Tension On Beams PDFJhe Taguines100% (1)
- Ojt HRMDocument7 pagesOjt HRMArlyn Joy NacinoNo ratings yet
- Smarajit Ghosh - Control Systems - Theory and Applications-Pearson (2006) PDFDocument629 pagesSmarajit Ghosh - Control Systems - Theory and Applications-Pearson (2006) PDFaggarwalakanksha100% (2)
- Windows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuideDocument61 pagesWindows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuidenetvistaNo ratings yet
- Comparison of Offline and Online Partial Discharge For Large Mot PDFDocument4 pagesComparison of Offline and Online Partial Discharge For Large Mot PDFcubarturNo ratings yet
- Cover Sheet: Online Learning and Teaching (OLT) Conference 2006, Pages Pp. 21-30Document12 pagesCover Sheet: Online Learning and Teaching (OLT) Conference 2006, Pages Pp. 21-30Shri Avinash NarendhranNo ratings yet
- Cs09 404 Programming Paradigm (Module 1 Notes)Document24 pagesCs09 404 Programming Paradigm (Module 1 Notes)Rohith BhaskaranNo ratings yet
- My Report in Assessment 1Document67 pagesMy Report in Assessment 1Eddie Wilson BroquezaNo ratings yet
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyFrom EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyNo ratings yet
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (410)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- Chernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterFrom EverandChernobyl 01:23:40: The Incredible True Story of the World's Worst Nuclear DisasterRating: 4 out of 5 stars4/5 (264)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldFrom EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldRating: 4.5 out of 5 stars4.5/5 (8)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessFrom EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (57)
- Vibration and Frequency: How to Get What You Want in LifeFrom EverandVibration and Frequency: How to Get What You Want in LifeRating: 4.5 out of 5 stars4.5/5 (13)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeRating: 4.5 out of 5 stars4.5/5 (3)
- Chasing Heisenberg: The Race for the Atom BombFrom EverandChasing Heisenberg: The Race for the Atom BombRating: 4.5 out of 5 stars4.5/5 (8)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)