You might also like
- Displacements, Stresses and StrainsDocument10 pagesDisplacements, Stresses and StrainsBendis AmmNo ratings yet
- Module 4 - Analysis of Beams Using Matrix Stiffness MethodDocument34 pagesModule 4 - Analysis of Beams Using Matrix Stiffness MethodVon TiosingNo ratings yet
- 04 - Analysis of Beams Using Matrix Stiffness MethodDocument43 pages04 - Analysis of Beams Using Matrix Stiffness MethodRyiehmNo ratings yet
- Mechanics of Materials BasicsDocument65 pagesMechanics of Materials BasicsengrasheedNo ratings yet
- 3D Stress ComponentsDocument8 pages3D Stress Componentsonnly1964No ratings yet
- Cauchy Stress Tensor WikiDocument10 pagesCauchy Stress Tensor WikiVicky JaiswalNo ratings yet
- Som PDFDocument106 pagesSom PDFSobhith KunjumonNo ratings yet
- Mohrs IntriductionDocument193 pagesMohrs IntriductionChandra ShekarNo ratings yet
- CHPT 4 - Development of Beams EquationsDocument46 pagesCHPT 4 - Development of Beams Equationsfatih reyhanNo ratings yet
- Introduction and Review: PreambleDocument127 pagesIntroduction and Review: PreambleNishanthoraNo ratings yet
- Intro To Basic Concepts of MECHANICSDocument23 pagesIntro To Basic Concepts of MECHANICSSwaral NaikNo ratings yet
- Som Coures FileDocument20 pagesSom Coures FileChaubey AjayNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- in This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureDocument35 pagesin This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureKanti SolankiNo ratings yet
- SM NTPELDocument68 pagesSM NTPELvempadareddyNo ratings yet
- State of Stress at PointDocument37 pagesState of Stress at PointDilara ÇınarelNo ratings yet
- Ceg Lab 202Document73 pagesCeg Lab 202Peace AdetunmibiNo ratings yet
- Engineering Mechanics I Meg205-2Document15 pagesEngineering Mechanics I Meg205-2Oyekale IniNo ratings yet
- 3 StressDocument11 pages3 StressGbenga AdewumiNo ratings yet
- IC24Document7 pagesIC24DrSn PadhiNo ratings yet
- CH 1Document64 pagesCH 1shaffetiNo ratings yet
- Stress and StrainDocument17 pagesStress and StrainakshatbhargavaNo ratings yet
- Three Moment Equation PaperDocument9 pagesThree Moment Equation PaperAkash SoodNo ratings yet
- Theories of Stress and StrainDocument28 pagesTheories of Stress and StrainJorge Roa RomeroNo ratings yet
- Mechanics PortionDocument55 pagesMechanics PortionRupak MandalNo ratings yet
- Stresses and Strains: Total & Deviatoric Stresses / Stress EllipsoidDocument21 pagesStresses and Strains: Total & Deviatoric Stresses / Stress EllipsoidErdem Salih SeyfeliNo ratings yet
- Mec of Def BodDocument9 pagesMec of Def Bodkeeno manzanoNo ratings yet
- Stresses: 2.1 General TheoryDocument25 pagesStresses: 2.1 General TheoryLocoo Goku YoshiiNo ratings yet
- Statics: ES 113 Mr. MoadiDocument49 pagesStatics: ES 113 Mr. MoadiDerrick Maatla MoadiNo ratings yet
- Introduction to Theory of Plates FundamentalsDocument41 pagesIntroduction to Theory of Plates FundamentalsAndrés MercadoNo ratings yet
- Capitulo 4Document0 pagesCapitulo 4saded05No ratings yet
- Principle of Virtual Work for Pin-Jointed FramesDocument14 pagesPrinciple of Virtual Work for Pin-Jointed FramesEmmanuel JustinNo ratings yet
- 2.1 Displacement (External Load)Document40 pages2.1 Displacement (External Load)Adron Lim33% (3)
- Theory of Elasticity and Plasticity-RizwanDocument34 pagesTheory of Elasticity and Plasticity-RizwanMISBAH UL HAQUENo ratings yet
- Cie 136Document151 pagesCie 136Sancho BilogNo ratings yet
- LectureDocument8 pagesLectureRohit PareekNo ratings yet
- P3 AxialloadDocument47 pagesP3 AxialloadBagas PinandikaNo ratings yet
- Cap 01Document33 pagesCap 01figueiredo0115740% (1)
- Lecture Notes - Linear Elasticity TheoryDocument43 pagesLecture Notes - Linear Elasticity Theoryzcapg17No ratings yet
- Simple Bending Theory for Straight BeamsDocument11 pagesSimple Bending Theory for Straight BeamsAnonymous 2RduvkjgZNo ratings yet
- Review Chapter 4-5Document29 pagesReview Chapter 4-5fannyparamitaNo ratings yet
- Finite Strain TheoryDocument19 pagesFinite Strain TheorySnehasish BhattacharjeeNo ratings yet
- Concepts in SADocument5 pagesConcepts in SAdownloadfastNo ratings yet
- Finite Element AnalysisDocument113 pagesFinite Element AnalysisTochi Krishna Abhishek57% (7)
- Module - 1Document26 pagesModule - 1naveenNo ratings yet
- 4.1 Stress VectorDocument23 pages4.1 Stress VectorEmir HamidovicNo ratings yet
- Mech of MaterialsDocument34 pagesMech of MaterialswieirraNo ratings yet
- Introduction to Plate Theory in 40 CharactersDocument41 pagesIntroduction to Plate Theory in 40 CharactersCHANDRA MANI GUPTANo ratings yet
- Friction Is A Force That Resists The Movement of Two Contacting SurfacesDocument5 pagesFriction Is A Force That Resists The Movement of Two Contacting SurfacesVince Rabin CandidatoNo ratings yet
- Rigid body statics and dynamics equationsDocument20 pagesRigid body statics and dynamics equationsJulia ChiesaNo ratings yet
- APhO2006 Theory Prob2 From DavidDocument3 pagesAPhO2006 Theory Prob2 From Daviddrgn1914No ratings yet
- Structural Mechanics Assignment HelpDocument29 pagesStructural Mechanics Assignment HelpMechanical Engineering Assignment HelpNo ratings yet
- Rock Stress and Strain ConceptsDocument21 pagesRock Stress and Strain ConceptsNikita SharmaNo ratings yet
- Strength of Material Interview Question and AnswersDocument27 pagesStrength of Material Interview Question and AnswersArjun M Betageri66% (29)
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- Some Preliminaries: The Standard Discrete System: 1940s, Showed That Reasonably Good SoluDocument17 pagesSome Preliminaries: The Standard Discrete System: 1940s, Showed That Reasonably Good SoluZeljko LazarevicNo ratings yet
- Pulse Tube RefrigeratorDocument6 pagesPulse Tube Refrigeratormuna222No ratings yet
- Study of Reaction TurbineDocument2 pagesStudy of Reaction Turbinemuna222No ratings yet
- Kaplan TurbineDocument4 pagesKaplan Turbinemuna222No ratings yet
- Unit 11Document28 pagesUnit 11muna222No ratings yet
- Francis TurbineDocument3 pagesFrancis Turbinemuna222No ratings yet
- Determining Fatigue Strength of Mild SteelDocument2 pagesDetermining Fatigue Strength of Mild Steelmuna222No ratings yet
- Torsion Testing Machine: Determining Rigidity, Yield Strength & Fracture ModulusDocument2 pagesTorsion Testing Machine: Determining Rigidity, Yield Strength & Fracture Modulusmuna222No ratings yet
- Study of a Reciprocating PumpDocument2 pagesStudy of a Reciprocating Pumpmuna222No ratings yet
- Experiment No - 3.10: Aim of The ExperimentDocument2 pagesExperiment No - 3.10: Aim of The Experimentmuna222No ratings yet
- 39 Non Conventional MachiningDocument15 pages39 Non Conventional MachiningPRASAD326100% (2)
- 9 Non Conventional MachiningDocument15 pages9 Non Conventional MachiningsohameyNo ratings yet
- Impact Testing Machine ExperimentDocument4 pagesImpact Testing Machine Experimentmuna222No ratings yet
- Brinell Hardness TestingDocument4 pagesBrinell Hardness Testingmuna222No ratings yet
- Centrifugal Pump EfficiencyDocument3 pagesCentrifugal Pump Efficiencymuna222No ratings yet
- 36 Non Conventional MachiningDocument13 pages36 Non Conventional MachiningPRASAD326100% (10)
- Dog Whistle - Wikipedia, The Free EncyclopediaDocument2 pagesDog Whistle - Wikipedia, The Free Encyclopediamuna222No ratings yet
- Water Jet MachiningDocument24 pagesWater Jet MachiningKarthik BhuvaneshNo ratings yet
- Ultrasonic Sensor - Wikipedia, The Free EncyclopediaDocument3 pagesUltrasonic Sensor - Wikipedia, The Free Encyclopediamuna222No ratings yet
- Solid MechDocument117 pagesSolid MechVignesh RajendranNo ratings yet
- 4 Traction and StressDocument16 pages4 Traction and Stressmuna222No ratings yet
- Complex Conjugate - Wikipedia, The Free EncyclopediaDocument5 pagesComplex Conjugate - Wikipedia, The Free Encyclopediamuna222No ratings yet
- 2008 Mech PDFDocument82 pages2008 Mech PDFmotuandgoluNo ratings yet
- Complex Conjugate - Wikipedia, The Free EncyclopediaDocument5 pagesComplex Conjugate - Wikipedia, The Free Encyclopediamuna222No ratings yet
- Biodiesel Six Stroke EnginesDocument6 pagesBiodiesel Six Stroke EnginesVenkata Harish YadavalliNo ratings yet
- Advanced Supercritical Boiler Technologies SeminarDocument11 pagesAdvanced Supercritical Boiler Technologies SeminarNavneet Pandey0% (1)
- Degree (Angle) - Wikipedia, The Free EncyclopediaDocument4 pagesDegree (Angle) - Wikipedia, The Free Encyclopediamuna222No ratings yet
- Supercritical BoilerDocument10 pagesSupercritical Boilermuna222No ratings yet
- Metallurgical Changes in Steels Due To Cryogenic Processing Its Applications Full ReportDocument14 pagesMetallurgical Changes in Steels Due To Cryogenic Processing Its Applications Full Reportmuna222No ratings yet
- BAFINAR - Midterm Draft (R) PDFDocument11 pagesBAFINAR - Midterm Draft (R) PDFHazel Iris Caguingin100% (1)
- (Section-A / Aip) : Delhi Public School GandhinagarDocument2 pages(Section-A / Aip) : Delhi Public School GandhinagarVvs SadanNo ratings yet
- KaphDocument7 pagesKaphFrater MagusNo ratings yet
- Sale of GoodsDocument41 pagesSale of GoodsKellyNo ratings yet
- Organizational CultureDocument76 pagesOrganizational Culturenaty fishNo ratings yet
- How To Make Wall Moulding Design For Rooms Accent Wall Video TutorialsDocument15 pagesHow To Make Wall Moulding Design For Rooms Accent Wall Video Tutorialsdonaldwhale1151No ratings yet
- FI - Primeiro Kfir 1975 - 1254 PDFDocument1 pageFI - Primeiro Kfir 1975 - 1254 PDFguilhermeNo ratings yet
- 4TH Quarter English 10 Assessment TestDocument6 pages4TH Quarter English 10 Assessment TestafbnjkcdNo ratings yet
- Data Processing & Hosting Services in The US Industry Report PDFDocument34 pagesData Processing & Hosting Services in The US Industry Report PDFimobiwan4711No ratings yet
- The Greco-Turkish War of 1920-1922: Greece Seeks Territory in Asia MinorDocument14 pagesThe Greco-Turkish War of 1920-1922: Greece Seeks Territory in Asia MinorFauzan Rasip100% (1)
- Sale Agreement SampleDocument4 pagesSale Agreement SampleAbdul Malik67% (3)
- Analyzing Transactions To Start A BusinessDocument22 pagesAnalyzing Transactions To Start A BusinessPaula MabulukNo ratings yet
- Farm Policy Options ChecklistDocument2 pagesFarm Policy Options ChecklistJoEllyn AndersonNo ratings yet
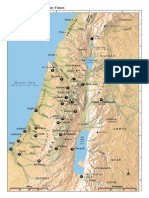
- Israel Bible MapDocument1 pageIsrael Bible MapMoses_JakkalaNo ratings yet
- Rock Art and Metal TradeDocument22 pagesRock Art and Metal TradeKavu RI100% (1)
- Chapter 3Document11 pagesChapter 3Leu Gim Habana PanuganNo ratings yet
- AC & Crew Lists 881st 5-18-11Document43 pagesAC & Crew Lists 881st 5-18-11ywbh100% (2)
- SK Council Authorizes New Bank AccountDocument3 pagesSK Council Authorizes New Bank Accountt3emo shikihiraNo ratings yet
- Exp Mun Feb-15 (Excel)Document7,510 pagesExp Mun Feb-15 (Excel)Vivek DomadiaNo ratings yet
- STD Symptoms, Causes and PreventionDocument3 pagesSTD Symptoms, Causes and PreventionSakshi TyagiNo ratings yet
- 9 Specific Relief Act, 1877Document20 pages9 Specific Relief Act, 1877mostafa faisalNo ratings yet
- Voiceless Alveolar Affricate TsDocument78 pagesVoiceless Alveolar Affricate TsZomiLinguisticsNo ratings yet
- Amadora V CA Case DigestDocument3 pagesAmadora V CA Case DigestLatjing SolimanNo ratings yet
- ACCOUNTING FOR SPECIAL EDUCATION FUNDSDocument12 pagesACCOUNTING FOR SPECIAL EDUCATION FUNDSIrdo KwanNo ratings yet
- Exam SE UZDocument2 pagesExam SE UZLovemore kabbyNo ratings yet
- The Scavenger's Handbook v1 SmallerDocument33 pagesThe Scavenger's Handbook v1 SmallerBeto TNo ratings yet
- Edpb 506 Intergrated Unit Project RubricDocument1 pageEdpb 506 Intergrated Unit Project Rubricapi-487414247No ratings yet
- Food and ReligionDocument8 pagesFood and ReligionAniket ChatterjeeNo ratings yet
- Marchetti-How The CIA Views The UFO PhenomenonDocument7 pagesMarchetti-How The CIA Views The UFO PhenomenonAntonio De ComiteNo ratings yet
- Relay Models Per Types Mdp38 EnuDocument618 pagesRelay Models Per Types Mdp38 Enuazer NadingaNo ratings yet