You might also like
- Formulas and Survey Time Series Analisys PDFDocument31 pagesFormulas and Survey Time Series Analisys PDFCISCO MANNo ratings yet
- Assignment I DSPDocument4 pagesAssignment I DSPManthan NachankarNo ratings yet
- 3 Discrete Random Variables and Probability DistributionsDocument22 pages3 Discrete Random Variables and Probability DistributionsTayyab ZafarNo ratings yet
- Lévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Document17 pagesLévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dony HidayatNo ratings yet
- PRP NotesDocument10 pagesPRP NotesBharath JojoNo ratings yet
- DSP Question Bank With SolutionsDocument52 pagesDSP Question Bank With SolutionsRakesh Kumar DNo ratings yet
- Probability and Queuing Theory - Question Bank.Document21 pagesProbability and Queuing Theory - Question Bank.prooban67% (3)
- An Instability Result To A Certain Vector Differential Equation of The Sixth OrderDocument4 pagesAn Instability Result To A Certain Vector Differential Equation of The Sixth OrderChernet TugeNo ratings yet
- Laboratory 5: Discrete Fourier Transform: Instructor: MR Ammar Naseer EE UET New CampusDocument9 pagesLaboratory 5: Discrete Fourier Transform: Instructor: MR Ammar Naseer EE UET New CampusWaleed SaeedNo ratings yet
- On Some Systems of Difference Equations With Periodic SolutionsDocument4 pagesOn Some Systems of Difference Equations With Periodic SolutionsSaherNo ratings yet
- PRP Anna University QADocument8 pagesPRP Anna University QANaresh KonduruNo ratings yet
- Dft:Discrete Fourier TransformDocument14 pagesDft:Discrete Fourier TransformMuhammad AlamsyahNo ratings yet
- Tute SignalsDocument12 pagesTute SignalsNikhil KumNo ratings yet
- Engineering Mathematics III 2015 Solved Question Papers For VTU All Semester 3Document25 pagesEngineering Mathematics III 2015 Solved Question Papers For VTU All Semester 3RajKumarNo ratings yet
- Chap 4Document9 pagesChap 4charles luisNo ratings yet
- On P-Adic Path IntegralDocument5 pagesOn P-Adic Path Integralבניה שטיינמץNo ratings yet
- GATE Mathematics Paper-2007Document11 pagesGATE Mathematics Paper-2007RajkumarNo ratings yet
- PQT NotesDocument337 pagesPQT NotesDot Kidman100% (1)
- Markproc 2022 V 6Document77 pagesMarkproc 2022 V 6Manish KumarNo ratings yet
- Numerical Solution of Second Order Nonlinear Fredholm-Volterra Integro Differential Equations by Canonical Basis FunctionDocument6 pagesNumerical Solution of Second Order Nonlinear Fredholm-Volterra Integro Differential Equations by Canonical Basis FunctioninventyNo ratings yet
- Stability of Nuclear Reactor: Point Model Analysis: K. Bu Cys, D. ŠvitraDocument13 pagesStability of Nuclear Reactor: Point Model Analysis: K. Bu Cys, D. ŠvitraUmair FarooqNo ratings yet
- Markproc 2022 V 5Document77 pagesMarkproc 2022 V 5Manish KumarNo ratings yet
- Final Exam Set ADocument17 pagesFinal Exam Set AAtikah J100% (1)
- DSP-2 (DFS & DFT) (S)Document53 pagesDSP-2 (DFS & DFT) (S)Pratik PatelNo ratings yet
- PeskinDocument714 pagesPeskinShuchen Zhu100% (1)
- Turunan Rumus Buku JacksonDocument11 pagesTurunan Rumus Buku JacksonlennyNo ratings yet
- Topics in Algebra Solution: Sung Jong Lee, Lovekrand - Github.io December 8, 2020Document16 pagesTopics in Algebra Solution: Sung Jong Lee, Lovekrand - Github.io December 8, 2020hGanieetNo ratings yet
- BMS College of Engineering, Bangalore-560019: July / August 2017 Supplementary Semester ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: July / August 2017 Supplementary Semester Examinationskoushik bhatNo ratings yet
- Schrodinger EquationDocument21 pagesSchrodinger EquationSukhwinder Singh Gill100% (3)
- 06 - Chapter 3Document82 pages06 - Chapter 3Yaazhini SiddharthNo ratings yet
- 316s Answer10 PDFDocument3 pages316s Answer10 PDFjisteeleNo ratings yet
- Fourth Sem IT Dept PDFDocument337 pagesFourth Sem IT Dept PDFSangeeta PalNo ratings yet
- ECE 602 Solution To Homework Assignment 4Document7 pagesECE 602 Solution To Homework Assignment 4souleyman hassanNo ratings yet
- Fourier Series Expansion of Functions in Two or More DimensionsDocument3 pagesFourier Series Expansion of Functions in Two or More DimensionsIgor GjorgjievNo ratings yet
- Quantum Mechanics BasicsDocument44 pagesQuantum Mechanics BasicsSiddharth GangalNo ratings yet
- Numericals ShimalowDocument118 pagesNumericals ShimalowClyde MaghamilNo ratings yet
- Solution Set 2Document10 pagesSolution Set 2TomicaTomicatomicaNo ratings yet
- Variable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationDocument6 pagesVariable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationLymesNo ratings yet
- Inverted Pendulum 1Document21 pagesInverted Pendulum 1ricardoxcmNo ratings yet
- UNIT-3: 1. Explain The Terms Following Terms: (A) Mean (B) Mean Square Value. AnsDocument13 pagesUNIT-3: 1. Explain The Terms Following Terms: (A) Mean (B) Mean Square Value. AnssrinivasNo ratings yet
- COHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationDocument18 pagesCOHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationAndrés MercadoNo ratings yet
- Sampling and ReconstructionDocument11 pagesSampling and ReconstructionSenthil KumarNo ratings yet
- FDSP SDocument22 pagesFDSP SYogesh Anand100% (1)
- Geometric Construction of Four-Dimensional Rotations Part I. Case of Four-Dimensional Euclidean SpaceDocument12 pagesGeometric Construction of Four-Dimensional Rotations Part I. Case of Four-Dimensional Euclidean SpaceShinya MinatoNo ratings yet
- Fourier SeriesDocument44 pagesFourier SeriesSilverblack ManNo ratings yet
- Two Degree of Freedom SystemDocument42 pagesTwo Degree of Freedom Systemmohanrajjercy71No ratings yet
- Sdof DynDocument29 pagesSdof DynAnkur KurmiNo ratings yet
- HocsDocument5 pagesHocsyygorakindyyNo ratings yet
- Digital Signal ProcessingDocument10 pagesDigital Signal ProcessingRakesh Kumar DNo ratings yet
- One Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationDocument15 pagesOne Degree of Freedom, Harmonically Excited Vibrations: Forced Harmonic VibrationUmair Mirza100% (1)
- Chapter 3. Polynomial Interpolation/Function ApproximationDocument11 pagesChapter 3. Polynomial Interpolation/Function ApproximationAnonymous 80p9OVNo ratings yet
- DSP Question Bank With SolutionsDocument46 pagesDSP Question Bank With Solutionsazhagumuruganr73% (22)
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Commensurabilities among Lattices in PU (1,n). (AM-132), Volume 132From EverandCommensurabilities among Lattices in PU (1,n). (AM-132), Volume 132No ratings yet
- Capitulo 10 - Luck. 2014-12Document25 pagesCapitulo 10 - Luck. 2014-12Alejandra GaonaNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityDipika GuptaNo ratings yet
- Laboratory Manual 4: Discrete Time Fourier Transform & Discrete Fourier TransformDocument10 pagesLaboratory Manual 4: Discrete Time Fourier Transform & Discrete Fourier TransformHassanNo ratings yet
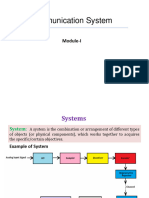
- COMMUNICATION SYSTEM - Module-IDocument84 pagesCOMMUNICATION SYSTEM - Module-ICOMPETITIVE GURU JINo ratings yet
- DMET 1001 Mid-Term - Model Answer - 35656Document12 pagesDMET 1001 Mid-Term - Model Answer - 35656Mariam HeikalNo ratings yet
- Laplace Transforms - : ApplicationsDocument11 pagesLaplace Transforms - : ApplicationsgkuttamaNo ratings yet
- Signal Representation Using Fourier SeriesDocument17 pagesSignal Representation Using Fourier SeriesNurul Fatihah ArdanNo ratings yet
- Ch03 OBE-Data and Signals - 1Document34 pagesCh03 OBE-Data and Signals - 1NooraFukuzawa NorNo ratings yet
- DSP Ug PDFDocument1,020 pagesDSP Ug PDFJazmin GonzalezNo ratings yet
- PFFT Max/MSPDocument14 pagesPFFT Max/MSPIoana Tăleanu100% (1)
- DSP Lab 4-Handout ModifiedDocument2 pagesDSP Lab 4-Handout ModifiedMehboob KhokharNo ratings yet
- Feature Extraction Identifying Condition Indicators With Matlab PDFDocument23 pagesFeature Extraction Identifying Condition Indicators With Matlab PDFKaran DoshiNo ratings yet
- CHAPTER 2 Discrete Fourier TransformDocument75 pagesCHAPTER 2 Discrete Fourier TransformSiddarth MadanNo ratings yet
- Machine Fault Signature AnalysisDocument10 pagesMachine Fault Signature AnalysisKotha MahipalNo ratings yet
- Lab - 4 - Drives - G (8) - SEC (6) (HARMONICS)Document10 pagesLab - 4 - Drives - G (8) - SEC (6) (HARMONICS)youssef essamNo ratings yet
- Advanced Signals and Systems - Hilbert Transform: Gerhard SchmidtDocument24 pagesAdvanced Signals and Systems - Hilbert Transform: Gerhard SchmidtvondutchlgNo ratings yet
- LTSpice FinalDocument91 pagesLTSpice FinalAncil CleetusNo ratings yet
- Deepsoil User Manual v6Document137 pagesDeepsoil User Manual v6Felipe ChNo ratings yet
- 5990 5266en PDFDocument10 pages5990 5266en PDFJames MossNo ratings yet
- Lecture 8B: Frequency-Domain Fourier TransformsDocument20 pagesLecture 8B: Frequency-Domain Fourier TransformsDen CelestraNo ratings yet
- Frequency Domain Transformations in Digital Image ProcessingDocument23 pagesFrequency Domain Transformations in Digital Image Processingahmedsulemanali11No ratings yet
- Harmonic Analysis. New York: Wiley, 1997. and Analysis. Hoboken, NJ: Wiley, 2001Document2 pagesHarmonic Analysis. New York: Wiley, 1997. and Analysis. Hoboken, NJ: Wiley, 2001MESSYNo ratings yet
- Finite Element Modeling and Simulation of Ultrasonic Guided Wave Propagation Using Frequency Response AnalysisDocument5 pagesFinite Element Modeling and Simulation of Ultrasonic Guided Wave Propagation Using Frequency Response AnalysisRobin JamesNo ratings yet
- 05 Lab Exer 1Document2 pages05 Lab Exer 1Kenken kenkenNo ratings yet
- FIR Filter Using FFT AlgorithmDocument1 pageFIR Filter Using FFT Algorithmnadyn brucalNo ratings yet
- Properties of The Fourier TransformDocument6 pagesProperties of The Fourier TransformMurthyNo ratings yet
- Lab 1 - Intro To Simulink and Frequency AnalysisDocument9 pagesLab 1 - Intro To Simulink and Frequency AnalysisErcanŞişkoNo ratings yet
- 6 I&s 3160620 QB 2022Document2 pages6 I&s 3160620 QB 2022HARSH HAMIRANINo ratings yet
- Of DSP 5Document7 pagesOf DSP 5Ali MohsinNo ratings yet
- Information Sources and Signals: Asst. Prof. Chaiporn Jaikaeo, PH.DDocument34 pagesInformation Sources and Signals: Asst. Prof. Chaiporn Jaikaeo, PH.DDorian GreyNo ratings yet