You might also like
- Ups Installation and Maintenance ManualDocument141 pagesUps Installation and Maintenance ManualMuntasir100% (1)
- Ups Installation and Maintenance ManualDocument141 pagesUps Installation and Maintenance ManualMuntasir100% (1)
- +++ Fundamental and Advanced Topics in Wind PowerDocument434 pages+++ Fundamental and Advanced Topics in Wind PowerMurat Ateş100% (1)
- Indian Railway Traction Manual For Operation and MaintenanceDocument247 pagesIndian Railway Traction Manual For Operation and MaintenanceChandan Kumar100% (1)
- Power Engineering MagazineDocument73 pagesPower Engineering MagazineRBZ100% (1)
- Psoc PDFDocument130 pagesPsoc PDFshree_rs81No ratings yet
- Power System Security: Viren B. PandyaDocument23 pagesPower System Security: Viren B. PandyavirenpandyaNo ratings yet
- Method of Voltage ControlDocument36 pagesMethod of Voltage ControlSANTHOSHNo ratings yet
- Harmonic Resonance During Energizing Primary Restorative Transmission SystemsDocument14 pagesHarmonic Resonance During Energizing Primary Restorative Transmission SystemsLuKas21cNo ratings yet
- Static Var Compensators: by Prof. C. RadhakrishnaDocument30 pagesStatic Var Compensators: by Prof. C. RadhakrishnaathbeljoeNo ratings yet
- Automatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmDocument8 pagesAutomatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmseventhsensegroupNo ratings yet
- Exercise 2Document1 pageExercise 2ahmadbakroNo ratings yet
- Effect of Load Shedding Strategy On Interconnected Power Systems Stability When A Blackout OccursDocument6 pagesEffect of Load Shedding Strategy On Interconnected Power Systems Stability When A Blackout OccursMoon3pellNo ratings yet
- Tutorial Chapter 5 - Power System ControlDocument2 pagesTutorial Chapter 5 - Power System ControlsahibNo ratings yet
- Microgrids Black StartDocument7 pagesMicrogrids Black StartLalit ChoudharyNo ratings yet
- Modbus PROTOCOL Grid EnglishxDocument13 pagesModbus PROTOCOL Grid EnglishxPochareddy Ramesh0% (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Power System Blackout: Share/download Essay: Chapter1: IntroductionDocument23 pagesPower System Blackout: Share/download Essay: Chapter1: Introductions_banerjeeNo ratings yet
- Overview of MULTI Megawatt WIND TURBINES and Wind ParkDocument24 pagesOverview of MULTI Megawatt WIND TURBINES and Wind ParkPrakash MishraNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- CIM Misunderstandings PDFDocument42 pagesCIM Misunderstandings PDFIgor SangulinNo ratings yet
- Smart Grid Concepts PPT Oct 24Document93 pagesSmart Grid Concepts PPT Oct 24ra2002ma2002931No ratings yet
- Model MBW15 MBW22Document3 pagesModel MBW15 MBW22Liem Nguyen HuuNo ratings yet
- A Refined HVDC Control SystemDocument10 pagesA Refined HVDC Control Systemshawnr7376No ratings yet
- Power System Protection AssignmentDocument26 pagesPower System Protection AssignmentMohsin AhsanNo ratings yet
- Power System Operation and ControlDocument5 pagesPower System Operation and ControlSantosh ThapaNo ratings yet
- Load Frequency Control of Hydro and Nuclear Power System by PI & GA ControllerDocument6 pagesLoad Frequency Control of Hydro and Nuclear Power System by PI & GA Controllerijsret100% (1)
- On FACTSDocument33 pagesOn FACTSAravind Babu100% (1)
- POWER SYSTEM OPERATION AND CONTROL Q&ADocument12 pagesPOWER SYSTEM OPERATION AND CONTROL Q&Amksamy2021No ratings yet
- EE8702-Power System Operation and ControlDocument20 pagesEE8702-Power System Operation and ControllvijayanandNo ratings yet
- DC Motor Control Through Power DevicesDocument42 pagesDC Motor Control Through Power DevicesOnyango Okelo100% (1)
- Generator-Transformer Capability Chart AnalysisDocument4 pagesGenerator-Transformer Capability Chart AnalysisFreddy TamayoNo ratings yet
- PSS Tutorial Chapter Accelerating Power R2Document10 pagesPSS Tutorial Chapter Accelerating Power R2shuaibyesNo ratings yet
- Generator Controls Voltage StabilityDocument13 pagesGenerator Controls Voltage StabilityhhipowerNo ratings yet
- 1.AC DC InteractionDocument26 pages1.AC DC Interactionpvenky_kkdNo ratings yet
- Power System Control and OperationDocument3 pagesPower System Control and OperationSantosh ThapaNo ratings yet
- Unit 1Document14 pagesUnit 1Yogesh KarlekarNo ratings yet
- Power System Operation and Control NotesDocument61 pagesPower System Operation and Control Notesanon_613151744100% (1)
- Component of HVDC Transmission NetworkDocument5 pagesComponent of HVDC Transmission NetworkIqbalilah RamdaniNo ratings yet
- M.Tech II Semester Exam Questions Surge Phenomena Insulation CoordinationDocument2 pagesM.Tech II Semester Exam Questions Surge Phenomena Insulation Coordinationprakash_yeeeNo ratings yet
- Introduction To The Project and Overview of Power System SecurityDocument9 pagesIntroduction To The Project and Overview of Power System Securitysalagasim100% (1)
- LQR Tuning of Power System Stabilizer For Damping OscillationsDocument18 pagesLQR Tuning of Power System Stabilizer For Damping Oscillations●●●●●●●1100% (1)
- Control Structures of Power Electronics For DPGSDocument23 pagesControl Structures of Power Electronics For DPGSAnna Maria BanicaNo ratings yet
- Power System Control Lecture NotesDocument24 pagesPower System Control Lecture NotesMo'men NabilNo ratings yet
- Power System Fault Analysis and Symmetrical ComponentsDocument27 pagesPower System Fault Analysis and Symmetrical Componentsግርማ ገ.No ratings yet
- Shunt CompensatorsDocument9 pagesShunt CompensatorsAR-T100% (3)
- Assignment 3 (EET302 OCPS)Document2 pagesAssignment 3 (EET302 OCPS)micoNo ratings yet
- Reactive Power ManagementDocument24 pagesReactive Power Managementabdul wakeelNo ratings yet
- Basic Structure of A Power SystemDocument9 pagesBasic Structure of A Power Systembiruke6No ratings yet
- Power Control AGC1Document35 pagesPower Control AGC1surya892100% (1)
- Study of Power System Security in Indian Utility 62 Bus SystemDocument10 pagesStudy of Power System Security in Indian Utility 62 Bus SystempjNo ratings yet
- A Control System For DC Arc Furnaces For Power Quality ImprovementsDocument8 pagesA Control System For DC Arc Furnaces For Power Quality ImprovementsgtgreatNo ratings yet
- Congestion Management in Deregulated Power System: A ReviewDocument7 pagesCongestion Management in Deregulated Power System: A ReviewGJESRNo ratings yet
- Voltage Stability With The Help of STATCOMDocument6 pagesVoltage Stability With The Help of STATCOMijsretNo ratings yet
- FMDS0523 - Emergency and Standby Power SystemsDocument16 pagesFMDS0523 - Emergency and Standby Power SystemsAnonymous dZOTH3qxJNo ratings yet
- Power System Operation and ControlDocument32 pagesPower System Operation and Controlyugant7No ratings yet
- Capacitor Banks Improve DG Set ProductivityDocument4 pagesCapacitor Banks Improve DG Set ProductivityTigrillo100% (1)
- Optimal SVC Placement for Voltage Improvement and Loss ReductionDocument10 pagesOptimal SVC Placement for Voltage Improvement and Loss Reductionkubera uNo ratings yet
- A New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemDocument6 pagesA New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemR0B0T2013No ratings yet
- Unit Commitment ProblemDocument13 pagesUnit Commitment ProblemTanishqNo ratings yet
- Single Line To Ground FaultDocument12 pagesSingle Line To Ground Faultluhusapa-1No ratings yet
- Protection Techniques With Renewable Resources and Smart Grids-A Survey 2015 PDFDocument23 pagesProtection Techniques With Renewable Resources and Smart Grids-A Survey 2015 PDFbdsrlNo ratings yet
- Application of Flexible AC Transmission System Devices in Wind Energy Conversion SystemsFrom EverandApplication of Flexible AC Transmission System Devices in Wind Energy Conversion SystemsNo ratings yet
- Low Frequency Oscillations and Power System BlackoutsDocument7 pagesLow Frequency Oscillations and Power System BlackoutsHasan FahadNo ratings yet
- Electrical Machines 01Document8 pagesElectrical Machines 01saghiram8071No ratings yet
- Electrical Machines: Phasors, Passive Elements, Circuits & Power AnalysisDocument5 pagesElectrical Machines: Phasors, Passive Elements, Circuits & Power Analysissaghiram8071No ratings yet
- High Voltage EngineeringDocument34 pagesHigh Voltage EngineeringChinni Krishna Kalyana Ramakumar0% (1)
- Advanced Power Protection LectureDocument30 pagesAdvanced Power Protection Lecturesaghiram8071No ratings yet
- High Voltage EngineeringDocument34 pagesHigh Voltage EngineeringChinni Krishna Kalyana Ramakumar0% (1)
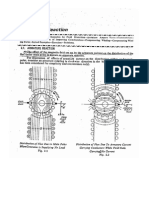
- Armature ReactionDocument4 pagesArmature Reactionsaghiram8071No ratings yet
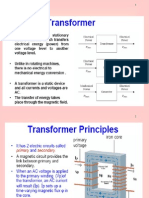
- TransformerDocument30 pagesTransformersaghiram8071No ratings yet
- Application of Electrical Machines Electromagnetism: Review Analogies Between Electric and Magnetic Circuits Faraday's Law Motor ActionDocument27 pagesApplication of Electrical Machines Electromagnetism: Review Analogies Between Electric and Magnetic Circuits Faraday's Law Motor ActionTuankuBadzlinHashfiNo ratings yet
- 10 1016@j Aej 2019 09 013Document16 pages10 1016@j Aej 2019 09 013Zeddini Mohamed AliNo ratings yet
- 03MC0132 Rev. 00Document11 pages03MC0132 Rev. 0089deveshNo ratings yet
- A Review of Optimization of Microgrid OperationDocument39 pagesA Review of Optimization of Microgrid OperationTosikur RahmanNo ratings yet
- Leds202206 DLDocument37 pagesLeds202206 DLjuankrlossssNo ratings yet
- 09 App J - AAMS Asset Code Specification - Consolidated (2017!02!21)Document116 pages09 App J - AAMS Asset Code Specification - Consolidated (2017!02!21)nnguyenthuanNo ratings yet
- Presentacion Sistemas AlternativosDocument14 pagesPresentacion Sistemas AlternativosDany ApablazaNo ratings yet
- A Review of Micro Grid Development in The United StatesDocument13 pagesA Review of Micro Grid Development in The United StatesSean SchneiderNo ratings yet
- Challenges of Grid Integration of Wind Power On Power System Grid Integrity: A ReviewDocument9 pagesChallenges of Grid Integration of Wind Power On Power System Grid Integrity: A Reviewgknits50No ratings yet
- Implementing Cybersecurity in The Energy Sector: August 2019Document19 pagesImplementing Cybersecurity in The Energy Sector: August 2019anneNo ratings yet
- 4 Analysis and Control of A CDFIGDocument6 pages4 Analysis and Control of A CDFIGAmy Leigh WilliamsNo ratings yet
- Hybrid Systems-Brochure Sunny Central StorageDocument8 pagesHybrid Systems-Brochure Sunny Central StorageIlhamSyaputraNo ratings yet
- CourseDocument13 pagesCourseJimmyNo ratings yet
- FCJJ37 Power ES StudentDocument9 pagesFCJJ37 Power ES StudentMateo AlvarezNo ratings yet
- 1k Segment Story Datacenters (Power Point Short)Document41 pages1k Segment Story Datacenters (Power Point Short)cachiletNo ratings yet
- Electrical Generation and Distribution Systems and Power Quality Disturbances by Gregorio Romero Rey and Luisa Martinez MunetaDocument316 pagesElectrical Generation and Distribution Systems and Power Quality Disturbances by Gregorio Romero Rey and Luisa Martinez MunetaNelson ParijósNo ratings yet
- MIT Report IPRI CIS Critical InfrastructureDocument49 pagesMIT Report IPRI CIS Critical InfrastructureTechCrunchNo ratings yet
- CEEW State of The Indian Renewable Energy Sector Report 31oct18Document64 pagesCEEW State of The Indian Renewable Energy Sector Report 31oct18Pushpinder KumarNo ratings yet
- Inversor Gerador Solar Chint PowerDocument20 pagesInversor Gerador Solar Chint PowerclaytonsulivanNo ratings yet
- 2018 06 RenewablesDocument32 pages2018 06 RenewablesAnonymous XgX8kTNo ratings yet
- Microturbines: Within This PageDocument12 pagesMicroturbines: Within This PagekarpakkiNo ratings yet
- ICACCI 2016: An Intelligent Controller for Smart Home Automation and Demand Side ManagementDocument4 pagesICACCI 2016: An Intelligent Controller for Smart Home Automation and Demand Side ManagementManuel GuijarroNo ratings yet
- MLT Inverters Brochure Powerstar 20180601Document2 pagesMLT Inverters Brochure Powerstar 20180601Rabee AlademeNo ratings yet
- Modern Wind GeneratorsDocument87 pagesModern Wind GeneratorsEngr Muhammad Abu BakrNo ratings yet
- ENMAX Power Corporation: EPC Projects & EngineeringDocument48 pagesENMAX Power Corporation: EPC Projects & EngineeringTrevor ClineNo ratings yet