You might also like
- 2007 Advanced SensorsDocument15 pages2007 Advanced SensorsjothilakshmiNo ratings yet
- TPS Method Measures Building MaterialsDocument7 pagesTPS Method Measures Building MaterialsGabs ChávezNo ratings yet
- Hot Wire Anemometry HandoutDocument4 pagesHot Wire Anemometry HandoutZ-BNo ratings yet
- Hot Wire Anemometer LengkapDocument97 pagesHot Wire Anemometer LengkapAhmad FaizalNo ratings yet
- Saket Udar 18BEC0760: Definition: Measuring Devices Temperature, Displacement, Vibration EtcDocument6 pagesSaket Udar 18BEC0760: Definition: Measuring Devices Temperature, Displacement, Vibration EtcAlexzander PatelNo ratings yet
- Thermal Diffusivity and Conductivity Linseis Wots 2-10-2014Document29 pagesThermal Diffusivity and Conductivity Linseis Wots 2-10-2014api-114820413No ratings yet
- SOS Strain Gauge Sensors For Force and Pressure TransducersDocument8 pagesSOS Strain Gauge Sensors For Force and Pressure TransducersLuis Antonio Hernandez JimenezNo ratings yet
- Linear N Radial Heat Conduction ApparDocument16 pagesLinear N Radial Heat Conduction ApparisdiantiNo ratings yet
- Principles of Temperature MeasurementDocument21 pagesPrinciples of Temperature MeasurementAddisu Safo BoseraNo ratings yet
- Precision thermistor thermometry fundamentalsDocument26 pagesPrecision thermistor thermometry fundamentalsDanielle CardiñoNo ratings yet
- Thermophysical Properties of Liquid Aluminum: 3036-VOLUME 48A, JUNE 2017 Metallurgical and Materials Transactions ADocument10 pagesThermophysical Properties of Liquid Aluminum: 3036-VOLUME 48A, JUNE 2017 Metallurgical and Materials Transactions AEduardo Fernandez SanchezNo ratings yet
- Optical Characterisation of La0 7Sr0 3MnDocument5 pagesOptical Characterisation of La0 7Sr0 3MnbjsimardNo ratings yet
- Tmag Zhang 2321558 Proof ColorDocument4 pagesTmag Zhang 2321558 Proof ColorTrinh Duy TanNo ratings yet
- Measure Mean & Fluctuating Fluid Flow VelocitiesDocument86 pagesMeasure Mean & Fluctuating Fluid Flow VelocitiesRajashree Ravi100% (1)
- High Sensitivity Metamaterial Based Bi-Material Terahertz SensorDocument9 pagesHigh Sensitivity Metamaterial Based Bi-Material Terahertz SensorAnuar BeltranNo ratings yet
- Calc Temp Load Capable of Cable-Neher-McGrathDocument13 pagesCalc Temp Load Capable of Cable-Neher-McGrathmcavy100% (1)
- Thermal Interface Material Basics For Electronic EngineersDocument5 pagesThermal Interface Material Basics For Electronic EngineersThermal Management PCB Design / Metal Core PCBs for LED Applications100% (1)
- Measurement and InstrumentDocument42 pagesMeasurement and InstrumentShubham BansalNo ratings yet
- E1225-13 Standard Test Method For Thermal Conductivity of Solids Using The Guarded - Comparative PDFDocument10 pagesE1225-13 Standard Test Method For Thermal Conductivity of Solids Using The Guarded - Comparative PDFFernando Gastañaga Flores100% (2)
- MTT1806 A207Document8 pagesMTT1806 A207kanbur.191No ratings yet
- Thermal Contact Resistance MeasurementsDocument10 pagesThermal Contact Resistance MeasurementsAbhishek BasakNo ratings yet
- Solar TowersDocument11 pagesSolar Towersmichele brusaNo ratings yet
- Tutorial: Time-Domain Thermoreflectance (TDTR) For Thermal Property Characterization of Bulk and Thin Film MaterialsDocument82 pagesTutorial: Time-Domain Thermoreflectance (TDTR) For Thermal Property Characterization of Bulk and Thin Film Materialsspow123No ratings yet
- Experiment-1: Aim: Characteristics of A Strain Gauge Sensor ObjectiveDocument41 pagesExperiment-1: Aim: Characteristics of A Strain Gauge Sensor ObjectiveForce XNo ratings yet
- Temperature SensorsDocument9 pagesTemperature SensorsFatima KhalidNo ratings yet
- SensorsDocument137 pagesSensorsVarsha AcharyaNo ratings yet
- Using The Transient Plane Source Method For Measuring Thermal Parameters of ElectroceramicsDocument6 pagesUsing The Transient Plane Source Method For Measuring Thermal Parameters of ElectroceramicsKevonSingh1No ratings yet
- Therm Is TorDocument6 pagesTherm Is Torsuraj_silence03No ratings yet
- Temp Wang03 PDFDocument7 pagesTemp Wang03 PDFJinNo ratings yet
- Thermocouple PDFDocument6 pagesThermocouple PDFibrahim2129047No ratings yet
- MotorDocument10 pagesMotorbhasker pandeyNo ratings yet
- ThermistorDocument41 pagesThermistorHarika HoneyNo ratings yet
- Thin Film Nano Thermocouple Sensors For Applications in Laser and Electron Beam IrradiationDocument8 pagesThin Film Nano Thermocouple Sensors For Applications in Laser and Electron Beam IrradiationChristle Jay AgbayaniNo ratings yet
- Types: Contact Temperature Sensors: Temperature and Its MeasurementDocument8 pagesTypes: Contact Temperature Sensors: Temperature and Its MeasurementDEMEKE BEYENENo ratings yet
- Resistive SensorsDocument27 pagesResistive Sensorsrajesh langojuNo ratings yet
- Bmi ManualDocument7 pagesBmi ManualMythily VedhagiriNo ratings yet
- 1605 08469 PDFDocument64 pages1605 08469 PDFNarayana Murthy GadiNo ratings yet
- Instrumentation Training Tutorial Part2Document25 pagesInstrumentation Training Tutorial Part2Gary8100% (1)
- Maldague - Applications of Infrared Thermography in Nondestructive Evaluation PDFDocument23 pagesMaldague - Applications of Infrared Thermography in Nondestructive Evaluation PDFFilipehenriqueNo ratings yet
- A Knitted Temperature Sensor (KTS) DevelopmentDocument4 pagesA Knitted Temperature Sensor (KTS) DevelopmentPropertywizzNo ratings yet
- Determine Coefficient of Thermal Expansion Using Fizeau InterferometerDocument6 pagesDetermine Coefficient of Thermal Expansion Using Fizeau InterferometerABHRANEIL BHATTACHARYANo ratings yet
- Temperature Sensing Technologies: So Many Temperature SensorsDocument12 pagesTemperature Sensing Technologies: So Many Temperature SensorsMaria ClaytonNo ratings yet
- Experiment 1 LinearDocument6 pagesExperiment 1 LinearDeniseLimNo ratings yet
- Reporters:: Reneo Lourdy H. Remigoso Hazziel Ll. Trece John Carl S. Jamito Jezer A. TambisDocument11 pagesReporters:: Reneo Lourdy H. Remigoso Hazziel Ll. Trece John Carl S. Jamito Jezer A. TambisSphinx RainxNo ratings yet
- Zmeskal PDFDocument6 pagesZmeskal PDFIntan CheeryNo ratings yet
- Calorimetric StuffDocument8 pagesCalorimetric StuffAmba James AsukNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Rating: 4.5 out of 5 stars4.5/5 (5)
- Noise in Nanoscale Semiconductor DevicesFrom EverandNoise in Nanoscale Semiconductor DevicesTibor GrasserNo ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Electronic Devices and Circuits: In Three VolumesFrom EverandElectronic Devices and Circuits: In Three VolumesRating: 3.5 out of 5 stars3.5/5 (2)
- Encyclopaedia Britannica, 11th Edition, Volume 6, Slice 8 "Conduction, Electric"From EverandEncyclopaedia Britannica, 11th Edition, Volume 6, Slice 8 "Conduction, Electric"No ratings yet
- Solenoid Actuators: Theory and Computational MethodsFrom EverandSolenoid Actuators: Theory and Computational MethodsRating: 3 out of 5 stars3/5 (1)
- Suma AlgebraicaDocument1 pageSuma Algebraicajpdavila205No ratings yet
- Division AlgebraicaDocument1 pageDivision Algebraicajpdavila205No ratings yet
- Freezeco TrifoldDocument6 pagesFreezeco Trifoldjpdavila205No ratings yet
- Standard HVAC Ducts Texas UniversityDocument4 pagesStandard HVAC Ducts Texas Universityjpdavila205No ratings yet
- Tabla de Frame Motores Baldor IEC y NEMADocument2 pagesTabla de Frame Motores Baldor IEC y NEMAenicolas2No ratings yet
- Batching and Mixing 2011Document84 pagesBatching and Mixing 2011jpdavila205100% (2)
- Catálogo KSB Filtros YDocument12 pagesCatálogo KSB Filtros Yjpdavila205No ratings yet
- Master: Bus-System Up To 144 ValvesDocument1 pageMaster: Bus-System Up To 144 Valvesjpdavila205No ratings yet
- Flange Gasket BasicsDocument10 pagesFlange Gasket Basicsjpdavila205No ratings yet
- Boiler Selection PDFDocument25 pagesBoiler Selection PDFShafqat AfridiNo ratings yet
- Spi Plate Flange Guide 2009Document20 pagesSpi Plate Flange Guide 2009Iebe SeventynineNo ratings yet
- Consolidated Valves 1511 Series Safety Valve: Maintenance ManualDocument32 pagesConsolidated Valves 1511 Series Safety Valve: Maintenance Manualjpdavila205No ratings yet
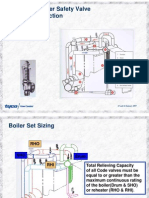
- Boiler Safety ValvesDocument21 pagesBoiler Safety ValvesParveen KohliNo ratings yet
- Tube InstallationDocument49 pagesTube InstallationgshdavidNo ratings yet
- FLIR - Thermal Imaging GuidebookDocument48 pagesFLIR - Thermal Imaging Guidebookdaniel_silabanNo ratings yet
- Multitec A SX Operating InstructionsDocument64 pagesMultitec A SX Operating Instructionsjpdavila205No ratings yet
- Fike VentingDocument6 pagesFike Ventingjpdavila205No ratings yet
- DibujosDocument28 pagesDibujosjpdavila205No ratings yet
- Hvu 06-2011 Int 1Document24 pagesHvu 06-2011 Int 1iuliandurdureanuNo ratings yet
- Keller VDN VenturiDocument8 pagesKeller VDN Venturijpdavila205No ratings yet
- Orifice Plate Flow MetersDocument8 pagesOrifice Plate Flow MetersGaurav Dhiman100% (1)
- V BeltsDocument58 pagesV BeltsBhavesh PanchalNo ratings yet
- Flanged Pipe & Fittings: 2005 EditionDocument38 pagesFlanged Pipe & Fittings: 2005 Editionjpdavila205No ratings yet
- Hilti, Inc. 5400 South 122 East Avenue Tulsa, OK 74146 1-800-879-8000Document17 pagesHilti, Inc. 5400 South 122 East Avenue Tulsa, OK 74146 1-800-879-8000jpdavila205No ratings yet
- Part-Turn Gearboxes GS 630.3: Assembly, Operation, Commissioning Operation InstructionsDocument36 pagesPart-Turn Gearboxes GS 630.3: Assembly, Operation, Commissioning Operation Instructionsjpdavila205No ratings yet
- Baghouse DonaldsonDocument4 pagesBaghouse Donaldsonjpdavila205No ratings yet
- Dry Dust MonroeDocument2 pagesDry Dust Monroejpdavila205No ratings yet
- Aquaclean Gea GMBHDocument4 pagesAquaclean Gea GMBHjpdavila205No ratings yet
- CHMT3038A Study Guide2022Document15 pagesCHMT3038A Study Guide2022kefiloe LetsieNo ratings yet
- Abaqus Analysis User's Guide (6.13) - Surface-Based Cohesive BehaviorDocument22 pagesAbaqus Analysis User's Guide (6.13) - Surface-Based Cohesive BehaviorpeymanNo ratings yet
- Betts 2000Document9 pagesBetts 2000sattar aljabairNo ratings yet
- Mechanical Design of Process Systems-Vol 1 (Piping & Pressure Vessels) - 2 كتاب موائع وفالفاتDocument332 pagesMechanical Design of Process Systems-Vol 1 (Piping & Pressure Vessels) - 2 كتاب موائع وفالفاتHussein Ali100% (6)
- 843 022 01 Dow Coating Materials Additives Product Solutions Selection GuideDocument16 pages843 022 01 Dow Coating Materials Additives Product Solutions Selection GuidenanoNo ratings yet
- Equations of HydrodynamicsDocument18 pagesEquations of HydrodynamicsAryce_No ratings yet
- ETA KLH en E PDFDocument51 pagesETA KLH en E PDFLucasNo ratings yet
- Shear in Inclined WebsDocument2 pagesShear in Inclined WebsjologscresenciaNo ratings yet
- Shear Corr 2001 PDFDocument20 pagesShear Corr 2001 PDFCHILAKAPATI ANJANEYULUNo ratings yet
- Fluid Mechanics - IntroductionDocument29 pagesFluid Mechanics - IntroductionJulius Ruz BalondoNo ratings yet
- Fluid MechanicsDocument8 pagesFluid MechanicsajaydevmalikNo ratings yet
- Design and Fabrication of A Furnace For PDFDocument12 pagesDesign and Fabrication of A Furnace For PDFHarshad Pawar PatilNo ratings yet
- Fluid Properties: 1.10 SolutionDocument15 pagesFluid Properties: 1.10 Solutionjason403No ratings yet
- Practical Rheology WorkshopDocument70 pagesPractical Rheology WorkshopKelvin Ramírez Martínez100% (1)
- Gujarat Technological University: SUBJECT CODE: 2130003Document5 pagesGujarat Technological University: SUBJECT CODE: 2130003Suman.SNo ratings yet
- CE GREAT MINDS PREBOARD PRACTICE STRUCTURAL ENGINEERINGDocument5 pagesCE GREAT MINDS PREBOARD PRACTICE STRUCTURAL ENGINEERINGSharaGailFuscabloNo ratings yet
- SAFE VerificationDocument7 pagesSAFE VerificationRahul AggarwalNo ratings yet
- Transport 252525252BPhenomena 252525252B 252525252B 252525252BIntroDocument54 pagesTransport 252525252BPhenomena 252525252B 252525252B 252525252BIntrocoolkanna100% (1)
- Chapter 2-Properties of FluidsDocument32 pagesChapter 2-Properties of FluidsErnesto LimNo ratings yet
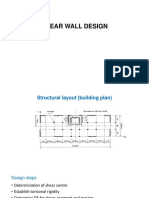
- Shear Wall DesignDocument22 pagesShear Wall DesignHarold Jackson Mtyana100% (1)
- BS 2015 Glossary of Paint and Related TermsDocument56 pagesBS 2015 Glossary of Paint and Related Termsminhhieu.qcNo ratings yet
- Aerodynamics For StudentsDocument123 pagesAerodynamics For Studentsfilipbgd94100% (1)
- Mechanics of Materials Torsion TestDocument18 pagesMechanics of Materials Torsion Testjrkling100% (1)
- ECLIPSE Chemical Enhanced Oil RecoveryDocument213 pagesECLIPSE Chemical Enhanced Oil RecoveryСергей ТNo ratings yet
- Raft Foundation DesignDocument5 pagesRaft Foundation Designafiq100% (2)
- Thermal Modeling of Metal Cutting ProcessDocument38 pagesThermal Modeling of Metal Cutting ProcessEl Mehdi MakaveliNo ratings yet
- Exercise 3 Rheological Properties of Fluid FoodsDocument3 pagesExercise 3 Rheological Properties of Fluid FoodsKristhel Joy Kara ManiponNo ratings yet
- Refined beam theories based on a unified formulationDocument27 pagesRefined beam theories based on a unified formulationDeepak MahapatraNo ratings yet
- Lateral Loads ManualDocument316 pagesLateral Loads Manualle huyNo ratings yet
- SurbyDocument7 pagesSurbykostas formulagrNo ratings yet