You might also like
- Design of A Low Voltage Low Drop Out LDO Voltage Cmos RegulatorDocument6 pagesDesign of A Low Voltage Low Drop Out LDO Voltage Cmos Regulatorsantosh kumar gangalaNo ratings yet
- Lab #2 - DiodesDocument16 pagesLab #2 - DiodescrackintheshatNo ratings yet
- Current Mode Pi ControllerDocument19 pagesCurrent Mode Pi ControllersunitaNo ratings yet
- Vibration Meter Circuit Using LED Driver IC LM3915 - GadgetronicxDocument4 pagesVibration Meter Circuit Using LED Driver IC LM3915 - GadgetronicxK. RAJA SEKARNo ratings yet
- Answer of Test Paper of Advanced Power Electronics 2015 (Benny Yeung)Document3 pagesAnswer of Test Paper of Advanced Power Electronics 2015 (Benny Yeung)taufiqishak09No ratings yet
- Electronic Circuits - II Lab ManualDocument26 pagesElectronic Circuits - II Lab Manualbalabasker100% (1)
- Central Semiconductor Silicon NPN Transistors 2N3419 2N3420 2N3421Document2 pagesCentral Semiconductor Silicon NPN Transistors 2N3419 2N3420 2N3421ritty9997446No ratings yet
- Toshiba Transistor GuideDocument5 pagesToshiba Transistor GuideLuis AntunesNo ratings yet
- 2N2219 PbfreeDocument5 pages2N2219 PbfreeVarshaNo ratings yet
- Analog Electronic Circuits (ELE-209) RCS (Makeup) PDFDocument2 pagesAnalog Electronic Circuits (ELE-209) RCS (Makeup) PDFAbhijan Carter BiswasNo ratings yet
- American International University-Bangladesh: Experiment 10 Lab ManualDocument4 pagesAmerican International University-Bangladesh: Experiment 10 Lab ManualAnamNo ratings yet
- Lab 6 BJT DC and Ac Analysis BBN 10205 (Done)Document6 pagesLab 6 BJT DC and Ac Analysis BBN 10205 (Done)Zhamir ZhakwanNo ratings yet
- Electronics design II amplifier calculationsDocument14 pagesElectronics design II amplifier calculationsbhanuNo ratings yet
- The Performance Analysis of The Synchronous Rectifiers: October 2007Document5 pagesThe Performance Analysis of The Synchronous Rectifiers: October 2007davidstooooNo ratings yet
- 2n5679 5682 PDFDocument5 pages2n5679 5682 PDFady_f_cNo ratings yet
- Midterm 11 2022Document4 pagesMidterm 11 2022kunghsiangyuNo ratings yet
- Analog IcDocument3 pagesAnalog IcPraveen kumarNo ratings yet
- Tutorial 5Document3 pagesTutorial 5Saransh MittalNo ratings yet
- Chapter 4Document22 pagesChapter 4hadushNo ratings yet
- Internal Guide: R.Valarmathi M.E., Lecturer, Department of EEE, DsecDocument26 pagesInternal Guide: R.Valarmathi M.E., Lecturer, Department of EEE, Dsecsetsindia3735No ratings yet
- EDC Lab No.8 (BJT Common Emitter I-V Characteristics)Document5 pagesEDC Lab No.8 (BJT Common Emitter I-V Characteristics)Umair WaqasNo ratings yet
- 4 Study of Characteristics of SCR, MOSFET & IGBTDocument12 pages4 Study of Characteristics of SCR, MOSFET & IGBTSeminars BRECWNo ratings yet
- Solman HomeworkDocument7 pagesSolman HomeworkFaishal MuhyiddinNo ratings yet
- 2.75V To 17V, 6A, 1.2Mhz, Synchronous, Ultra-Thin Power Module Description FeaturesDocument22 pages2.75V To 17V, 6A, 1.2Mhz, Synchronous, Ultra-Thin Power Module Description FeaturesEugene FlexNo ratings yet
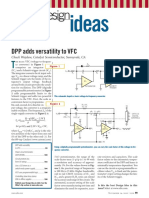
- VFC PDFDocument7 pagesVFC PDFtommy99No ratings yet
- Ece2201 SJB Lab5 ADocument4 pagesEce2201 SJB Lab5 AbikashNo ratings yet
- NPN Switching Transistors 2N2222 2N2222ADocument3 pagesNPN Switching Transistors 2N2222 2N2222Azbhp zNo ratings yet
- App. Electronics Exp#6Document7 pagesApp. Electronics Exp#6muazam aliNo ratings yet
- 2n6027 6028Document5 pages2n6027 6028Tristan-234No ratings yet
- Review Problems: 40 k Ω 4 kΩ Vo +Document16 pagesReview Problems: 40 k Ω 4 kΩ Vo +NajmoAdenNo ratings yet
- Analog Integrated Circuits & Technology (EC 305) : Differential Amplifier With Passive Load and Its Detail AnalysisDocument13 pagesAnalog Integrated Circuits & Technology (EC 305) : Differential Amplifier With Passive Load and Its Detail AnalysisAbir HoqueNo ratings yet
- 2N3903 2N3904 Silicon NPN Transistors DescriptionDocument3 pages2N3903 2N3904 Silicon NPN Transistors DescriptionJosé ValdiviezoNo ratings yet
- 1.2A, 24V, 1.4Mhz Step-Down Converter in A Tsot23-6: The Future of Analog Ic TechnologyDocument9 pages1.2A, 24V, 1.4Mhz Step-Down Converter in A Tsot23-6: The Future of Analog Ic Technologyhash defineNo ratings yet
- 2018 Lab 4B Digital To Analog ConverterDocument5 pages2018 Lab 4B Digital To Analog ConverterPatrick SibandaNo ratings yet
- PE Lab Manual 21EEL58 2023-24 StudentDocument37 pagesPE Lab Manual 21EEL58 2023-24 Studentanitamadiwalar04No ratings yet
- Lectures On Transistors 1Document15 pagesLectures On Transistors 1alhofufy.aNo ratings yet
- D2012Document5 pagesD2012ofankNo ratings yet
- ECD Lab 6Document6 pagesECD Lab 6Rakhmeen gulNo ratings yet
- Switch Amplifier KCD2-SOT-1.LB: FunctionDocument4 pagesSwitch Amplifier KCD2-SOT-1.LB: FunctionAmir KalčoNo ratings yet
- 2.25-Mhz 600-Ma/1000-Ma Dual Step-Down Converter: FeaturesDocument36 pages2.25-Mhz 600-Ma/1000-Ma Dual Step-Down Converter: FeaturescsclzNo ratings yet
- Applied Electronics CH2Document7 pagesApplied Electronics CH2mesfin snowNo ratings yet
- 2N3903 2N3904 NPN Silicon Transistor DescriptionDocument2 pages2N3903 2N3904 NPN Silicon Transistor Descriptionjavier venturaNo ratings yet
- DC DC ConvertersDocument22 pagesDC DC ConvertersAnonymous UJs2uePNo ratings yet
- American International University – Bangladesh Final-Term Assignment in Analog ElectronicsDocument5 pagesAmerican International University – Bangladesh Final-Term Assignment in Analog ElectronicsSHAHRIAR SHOVANNo ratings yet
- Analog Integrated Circuits & Technology (EC 305) : Differential Amplifier With Passive Load and Its Detail AnalysisDocument12 pagesAnalog Integrated Circuits & Technology (EC 305) : Differential Amplifier With Passive Load and Its Detail AnalysisAbir HoqueNo ratings yet
- LVDT Position Transducer Lab SessionDocument5 pagesLVDT Position Transducer Lab SessionNioNo ratings yet
- 2sc2500 PDFDocument4 pages2sc2500 PDFmohamed anasNo ratings yet
- Amplitude ModulationDocument10 pagesAmplitude ModulationlakshmiNo ratings yet
- BU208 BU208A High Voltage NPN Silicon Power Transistor DescriptionDocument2 pagesBU208 BU208A High Voltage NPN Silicon Power Transistor DescriptionLeonardoMartinNo ratings yet
- General Purpose Amplification ( 12V, 3A) : TransistorsDocument4 pagesGeneral Purpose Amplification ( 12V, 3A) : TransistorsTamulmol69ersNo ratings yet
- Aec Lab ManualDocument33 pagesAec Lab Manualganga_ch1No ratings yet
- Apu8836 3Document6 pagesApu8836 3dataNo ratings yet
- AEC Manual 2018-2019Document99 pagesAEC Manual 2018-2019Raza SikandarNo ratings yet
- Open Circuit Fault Detection and Localization in Modular Multilevel ConverterDocument6 pagesOpen Circuit Fault Detection and Localization in Modular Multilevel ConverterBeto MayoNo ratings yet
- Unit 4 PDFDocument42 pagesUnit 4 PDFPramod GangwarNo ratings yet
- Multivibratori Monostabel - RHDocument12 pagesMultivibratori Monostabel - RHRoland HoxhaNo ratings yet
- 2N5320 2N5321 NPN 2N5322 2N5323 PNP Complementary Silicon Switching Transistors DescriptionDocument3 pages2N5320 2N5321 NPN 2N5322 2N5323 PNP Complementary Silicon Switching Transistors Descriptionfabian orozNo ratings yet
- Eec 234 Lectures Lecture Notes 1 12Document49 pagesEec 234 Lectures Lecture Notes 1 12ayoolakoleosoNo ratings yet
- Exact DynamicsDocument4 pagesExact Dynamicsapi-19755952No ratings yet
- Peak Detectors For Multistandard Wireless Receivers: Seok-Bae Park, James E. Wilson, and Mohammed IsmailDocument4 pagesPeak Detectors For Multistandard Wireless Receivers: Seok-Bae Park, James E. Wilson, and Mohammed Ismailapi-19755952No ratings yet
- Requirements For Digital: AN Approach For Specifying The Adc UWB ReceiversDocument5 pagesRequirements For Digital: AN Approach For Specifying The Adc UWB Receiversapi-19755952No ratings yet
- Design and Implementation of L1-Band CA-code GPS RF Front-End ChipDocument4 pagesDesign and Implementation of L1-Band CA-code GPS RF Front-End Chipapi-19755952No ratings yet
- A CMOS Automatic Gain Control For Hearing Aid Devices: Jos6 Silva-Martinez and Jorge Salcedo-SutberDocument4 pagesA CMOS Automatic Gain Control For Hearing Aid Devices: Jos6 Silva-Martinez and Jorge Salcedo-Sutberapi-19755952No ratings yet
- A Fast Compact CMOS Feedforward Automatic Gain Control CircuitDocument4 pagesA Fast Compact CMOS Feedforward Automatic Gain Control Circuitapi-19755952No ratings yet
- Get PDF12Document4 pagesGet PDF12api-19755952No ratings yet
- A CMOS Automatic Gain Control For Hearing Aid Devices: Jos6 Silva-Martinez and Jorge Salcedo-SutberDocument4 pagesA CMOS Automatic Gain Control For Hearing Aid Devices: Jos6 Silva-Martinez and Jorge Salcedo-Sutberapi-19755952No ratings yet
- Fast Automatic Gain Control Employing Two Compensation Loop For High Throughput MIMO-OFDM ReceiversDocument4 pagesFast Automatic Gain Control Employing Two Compensation Loop For High Throughput MIMO-OFDM Receiversapi-19755952No ratings yet
- A High Speed Feed Forward Pseudo Automallc Gain Control Circuit For An Amplifier CascadeDocument4 pagesA High Speed Feed Forward Pseudo Automallc Gain Control Circuit For An Amplifier Cascadeapi-19755952No ratings yet
- Improved Dynamic Model of Fast-Settling Linear-in-dB Automatic Gain Control CircuitDocument4 pagesImproved Dynamic Model of Fast-Settling Linear-in-dB Automatic Gain Control Circuitapi-19755952No ratings yet
- Behavioral Modeling and Simulation of A Mixed Analog/Digital Automatic Gain Control Loop in A 5 GHZ Wlan ReceiverDocument6 pagesBehavioral Modeling and Simulation of A Mixed Analog/Digital Automatic Gain Control Loop in A 5 GHZ Wlan Receiverapi-19755952No ratings yet
- Fully Differential CmosDocument4 pagesFully Differential Cmosapi-19755952No ratings yet
- A 56-mW 23-mm Single-Chip 180-nm CMOS GPS Receiver With 27.2-mW 4.1-mm RadioDocument12 pagesA 56-mW 23-mm Single-Chip 180-nm CMOS GPS Receiver With 27.2-mW 4.1-mm Radioapi-19755952No ratings yet
- A 35-mW 3.6-mm Fully Integrated 0.18-: M Cmos Gps RadioDocument9 pagesA 35-mW 3.6-mm Fully Integrated 0.18-: M Cmos Gps Radioapi-19755952No ratings yet
- Dual-Band RF Receiver Chip-Set For Galileo/GPS Applications: M. Detratti, E. López, E.Pérez, R.Palacio and M. LobeiraDocument9 pagesDual-Band RF Receiver Chip-Set For Galileo/GPS Applications: M. Detratti, E. López, E.Pérez, R.Palacio and M. Lobeiraapi-19755952No ratings yet
- Vga For Uwb SystemDocument4 pagesVga For Uwb Systemapi-19755952No ratings yet
- A 19-mW 2.6-mm L1/L2 Dual-Band CMOS GPS ReceiverDocument12 pagesA 19-mW 2.6-mm L1/L2 Dual-Band CMOS GPS Receiverapi-19755952No ratings yet
- PRINT5Document3 pagesPRINT5api-19755952No ratings yet
- Low-Power GPS Receiver Design: Invited PaperDocument10 pagesLow-Power GPS Receiver Design: Invited Paperapi-19755952No ratings yet
- Dual-Band RF Receiver Chip-Set For Galileo/GPS Applications: M. Detratti, E. López, E.Pérez, R.Palacio and M. LobeiraDocument9 pagesDual-Band RF Receiver Chip-Set For Galileo/GPS Applications: M. Detratti, E. López, E.Pérez, R.Palacio and M. Lobeiraapi-19755952No ratings yet
- Dynamic Range and Accurate dB-Linear: A CMOS Variable Gain Amplifier With Wide CharacteristicDocument5 pagesDynamic Range and Accurate dB-Linear: A CMOS Variable Gain Amplifier With Wide Characteristicapi-19755952No ratings yet
- GM Vs Id Design FlowDocument5 pagesGM Vs Id Design Flowapi-19755952No ratings yet
- LUL2 Dual-Band CMOS GPS Receiver: Jongmoon Sanghyun Cho, Jinho KODocument4 pagesLUL2 Dual-Band CMOS GPS Receiver: Jongmoon Sanghyun Cho, Jinho KOapi-19755952No ratings yet
- PRINT4Document4 pagesPRINT4api-19755952No ratings yet
- Wide Dynamic Range Variable-Gain Amplifier Based On New Approximated Exponential EquationDocument3 pagesWide Dynamic Range Variable-Gain Amplifier Based On New Approximated Exponential Equationapi-19755952No ratings yet
- A Wideband CMOS Variable Gain Amplifier With A Novel Linear-in-dB Gain Control StructureDocument4 pagesA Wideband CMOS Variable Gain Amplifier With A Novel Linear-in-dB Gain Control Structureapi-19755952No ratings yet
- General Class AbDocument8 pagesGeneral Class Abapi-19755952No ratings yet
- A Differential CMOS Current-Mode Variable Gain Amplifier With Digital dB-Linear Gain ControlDocument14 pagesA Differential CMOS Current-Mode Variable Gain Amplifier With Digital dB-Linear Gain Controlapi-19755952No ratings yet