You might also like
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsFrom EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsNo ratings yet
- Architecture Des Ordinateur SDocument316 pagesArchitecture Des Ordinateur SDon Pascal100% (1)
- Cours PWMDocument43 pagesCours PWMzakarii67% (3)
- Architecture Des OrdinateursDocument362 pagesArchitecture Des OrdinateursPatrick TanisNo ratings yet
- Le Langage CDocument135 pagesLe Langage CYounes El-BouznaniNo ratings yet
- Pas A Pas L'assembleurDocument141 pagesPas A Pas L'assembleurOnu Bey100% (1)
- Cours Langage Assembleur PDFDocument26 pagesCours Langage Assembleur PDFMehdi Ait EL Kadi100% (1)
- Architecture D'ordinateurDocument42 pagesArchitecture D'ordinateurSoufiane Bouali100% (4)
- L'électroniqueDocument401 pagesL'électroniquemacouri86% (7)
- Langage AssembleurDocument24 pagesLangage AssembleurAbba Dicko100% (9)
- Langage C CoursDocument383 pagesLangage C CoursLyes Akram100% (6)
- Analyse Numérique Avec TP INSA ToulouseDocument110 pagesAnalyse Numérique Avec TP INSA Toulousealirfane100% (1)
- Programmation Des MicrocontroleursDocument108 pagesProgrammation Des MicrocontroleursHors ManNo ratings yet
- TD 1 MicroControleurDocument1 pageTD 1 MicroControleurimenenouvelle100% (1)
- TP ReseauxDocument4 pagesTP ReseauxImade Eddine100% (2)
- Architecture Des Ordinateurs - Cours IutDocument36 pagesArchitecture Des Ordinateurs - Cours Iutmass murderer63100% (5)
- Cours Et TD Électroniques NumériquesDocument60 pagesCours Et TD Électroniques NumériquesOussama Sadki100% (1)
- Le C en 20hDocument177 pagesLe C en 20hAmin DvillasNo ratings yet
- C Corrige ExercicesDocument139 pagesC Corrige ExercicesHicham PlushichamNo ratings yet
- Le Langage C en 20hDocument233 pagesLe Langage C en 20hcointoinNo ratings yet
- PIC en C - FonctionsDocument17 pagesPIC en C - FonctionsHaythem FerjaniNo ratings yet
- PDF Conception Et Realisation Dx27un Ahmed Mabrouk 4768 CompressDocument40 pagesPDF Conception Et Realisation Dx27un Ahmed Mabrouk 4768 CompressHamdi GdhamiNo ratings yet
- Cours - Conception Des Systemes EmbarquesDocument36 pagesCours - Conception Des Systemes EmbarquesReda BoutenfitNo ratings yet
- Réseaux Locaux IndustrielsDocument23 pagesRéseaux Locaux IndustrielsAmmar CheguevaraNo ratings yet
- 12 OpenCV PDFDocument43 pages12 OpenCV PDFFrancisco Ochoa BuenoNo ratings yet
- ALGORITHMIQUEDocument87 pagesALGORITHMIQUEnathan lopez100% (1)
- Interruption 16F877Document29 pagesInterruption 16F877Tran Cuong Hung100% (1)
- Initiation Aux Microcontrôleurs dsPIC30FDocument10 pagesInitiation Aux Microcontrôleurs dsPIC30Fanon_72023590100% (1)
- Cours Circuits LogiquesDocument88 pagesCours Circuits LogiquesHichem HamdiNo ratings yet
- Cour AlgorithmiqueDocument115 pagesCour AlgorithmiqueIdriss Ben Bassou100% (1)
- ALGORITHMIQUEDocument183 pagesALGORITHMIQUELyes AkramNo ratings yet
- Cours - Programmation C Pour Systèmes EmbarquésDocument53 pagesCours - Programmation C Pour Systèmes EmbarquéssouilelyNo ratings yet
- Odulation DE Argeur D' Mpulsion: Rojet 1999Document79 pagesOdulation DE Argeur D' Mpulsion: Rojet 1999Youcef Diaf100% (2)
- 02 - Microcontroleur de La Famille PIC PDFDocument59 pages02 - Microcontroleur de La Famille PIC PDFFarid Afifi100% (1)
- Cours-Architecture Des OrdinateursDocument145 pagesCours-Architecture Des OrdinateursSaadani RiadhNo ratings yet
- Inf Ind Emsi PDFDocument98 pagesInf Ind Emsi PDFHafsa KahiNo ratings yet
- Cours Architecture D'ordinateurDocument10 pagesCours Architecture D'ordinateurexplicationgratuiteNo ratings yet
- Bios Cours Maintenance Informatique 2 Sur 3Document4 pagesBios Cours Maintenance Informatique 2 Sur 3FOUAD EL BRAHMI100% (6)
- Cours C PDFDocument111 pagesCours C PDFOthmane BenhmimidNo ratings yet
- Le Grafcet G7Document66 pagesLe Grafcet G7Anonymous dR83ohhqNo ratings yet
- MIPSDocument48 pagesMIPSBoris ButnaruNo ratings yet
- PL7 ProDocument77 pagesPL7 ProWillian LazzarettiNo ratings yet
- Arduino Pour Bien Commencer en Electronique Et en ProgrammationDocument302 pagesArduino Pour Bien Commencer en Electronique Et en ProgrammationHichem HamdiNo ratings yet
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013From EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013No ratings yet
- Biométrie: L'avenir décrit dans le film "Minority Report" est déjà làFrom EverandBiométrie: L'avenir décrit dans le film "Minority Report" est déjà làNo ratings yet
- Transfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routeFrom EverandTransfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routeNo ratings yet
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesFrom EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesRating: 2 out of 5 stars2/5 (1)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueFrom EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueNo ratings yet
- Extraction et Gestion des Connaissances: Actes de la conférence EGC'2019From EverandExtraction et Gestion des Connaissances: Actes de la conférence EGC'2019Rating: 5 out of 5 stars5/5 (1)
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesFrom EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesNo ratings yet
- Expériences et observations sur l'électricité faites à Philadelphie en AmériqueFrom EverandExpériences et observations sur l'électricité faites à Philadelphie en AmériqueNo ratings yet
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueFrom EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueNo ratings yet
- Nasro CV 1Document1 pageNasro CV 1api-3746044No ratings yet
- XpdocDocument19 pagesXpdocPablo SeneNo ratings yet
- WifiDocument29 pagesWifiMoHamed NejjArNo ratings yet
- P1 - Chap3 - Morie NASRO@Document24 pagesP1 - Chap3 - Morie NASRO@api-3746044No ratings yet
- Didier Mailliet Cours DelphiDocument204 pagesDidier Mailliet Cours DelphiagaiusNo ratings yet
- Access 97 FRDocument42 pagesAccess 97 FRkeloramijanjyNo ratings yet
- Access97frExercice PDFDocument37 pagesAccess97frExercice PDFSalim HabakNo ratings yet
- Routage - IP - v2.0 NASRO@Document57 pagesRoutage - IP - v2.0 NASRO@api-3746044No ratings yet
- StallingsChap4Cache NASRO@Document36 pagesStallingsChap4Cache NASRO@api-3746044No ratings yet
- SSTIC03-Article-Ruff-Le Spyware Dans Windows XPDocument15 pagesSSTIC03-Article-Ruff-Le Spyware Dans Windows XPCherboub EiforeNo ratings yet
- Sécuriser Sa Messagerie D'entreprise NASRO@Document22 pagesSécuriser Sa Messagerie D'entreprise NASRO@api-3746044No ratings yet
- Livre Blanc 2010 InternetDocument96 pagesLivre Blanc 2010 Internetla020576No ratings yet
- Chap - L'installation Sous Linux NASRO@Document17 pagesChap - L'installation Sous Linux NASRO@api-3746044No ratings yet
- Architecture Des Ordinateurs 3Document112 pagesArchitecture Des Ordinateurs 3api-3746044No ratings yet
- Les Bases de La Technologie Réseau NASRO@Document31 pagesLes Bases de La Technologie Réseau NASRO@api-3746044No ratings yet
- Architecture Des OrdinateursDocument18 pagesArchitecture Des Ordinateursapi-3746044No ratings yet
- Creer Son Serveur LinuxDocument120 pagesCreer Son Serveur Linuxmass murderer63100% (10)
- Cours-17 - Pujolle NASRO@Document26 pagesCours-17 - Pujolle NASRO@api-3746044No ratings yet
- Administration ReseauDocument70 pagesAdministration ReseauDjo MounirNo ratings yet
- Chap - La Configuration NASRO@Document15 pagesChap - La Configuration NASRO@api-3746044No ratings yet
- Chap - Installer Et Configurer PHP NASRO@Document31 pagesChap - Installer Et Configurer PHP NASRO@api-3746044No ratings yet
- (Cours Réseaux Et Télécoms Avec Exercices Corrigés - COURS1) PDFDocument21 pages(Cours Réseaux Et Télécoms Avec Exercices Corrigés - COURS1) PDFabdo-dz88% (24)
- WIFI Par La PratiqueDocument36 pagesWIFI Par La Pratiquemacouri0% (1)
- Architecture Des Ordinateurs 2Document12 pagesArchitecture Des Ordinateurs 2api-3746044100% (1)
- Chap1 SchwarzDocument15 pagesChap1 Schwarzapi-3746044No ratings yet
- Panneau de ConfigurationDocument5 pagesPanneau de Configurationapi-3746044No ratings yet
- Aperçu Général Des Protocoles TCP - IP NASRO@Document38 pagesAperçu Général Des Protocoles TCP - IP NASRO@api-3746044No ratings yet
- Cours de Réseaux (Maîtrise D'informatique Université D'angers)Document87 pagesCours de Réseaux (Maîtrise D'informatique Université D'angers)niko100% (8)
- 25 Conseils Pour Faire Connaitre Son Site InternetDocument58 pages25 Conseils Pour Faire Connaitre Son Site Internetxavier100% (30)
- Menu Ajout Suppression de ProgrammesDocument2 pagesMenu Ajout Suppression de Programmesapi-3746044No ratings yet
- Jointure Parallèle Sur Les Processeurs Graphiques (GPU) Avec CUDADocument74 pagesJointure Parallèle Sur Les Processeurs Graphiques (GPU) Avec CUDAbahous mokhtarNo ratings yet
- Annales 3Document24 pagesAnnales 3Chafik BerdjouhNo ratings yet
- Les Microcontroleurs Pic16f84Document28 pagesLes Microcontroleurs Pic16f84Mohssin FsjesNo ratings yet
- Cours Sur Les Automates Programmables Industriels: LTA-Laboratoire D'automatismesDocument39 pagesCours Sur Les Automates Programmables Industriels: LTA-Laboratoire D'automatismesExode Christ GuielleNo ratings yet
- VHDLDocument16 pagesVHDLbbaaziz20055642No ratings yet
- Cours Arduino PDFDocument8 pagesCours Arduino PDFFrancklin TokimitondrasoaNo ratings yet
- Support de Cours: Système D'exploitation IDocument19 pagesSupport de Cours: Système D'exploitation Islim yaichNo ratings yet
- Chapitre 3 Etudiant Architectures Des P C LEA2 Octobre 2023Document30 pagesChapitre 3 Etudiant Architectures Des P C LEA2 Octobre 2023maymoun jabnouniNo ratings yet
- Calculateur Et InterfacageDocument9 pagesCalculateur Et InterfacageWissam TizaNo ratings yet
- Chapitre 0 RappelDocument3 pagesChapitre 0 RappelkarimNo ratings yet
- Chapitre 6 - Structure Interne Du PIC 16F887Document24 pagesChapitre 6 - Structure Interne Du PIC 16F887OumhineAliNo ratings yet
- Instructions 6809Document2 pagesInstructions 6809Antonio SabaNo ratings yet
- COURS ImsetDocument17 pagesCOURS ImsetSkander Ben OthmenNo ratings yet
- GE MP16bDocument98 pagesGE MP16bSafaa BelagounNo ratings yet
- Poo 1Document50 pagesPoo 1Sami BrahmiNo ratings yet
- TP4 Simulation Microcontroleur PICDocument6 pagesTP4 Simulation Microcontroleur PICSalah Dahouathi100% (1)
- Prog Parallèle Seance 2 20 21Document191 pagesProg Parallèle Seance 2 20 21FatimaNo ratings yet
- Cours 3 - Chapitre III - Jeux D - Instructions - 2020 PDFDocument35 pagesCours 3 - Chapitre III - Jeux D - Instructions - 2020 PDFboujemaa SAADATNo ratings yet
- Step7 MicroWinDocument7 pagesStep7 MicroWinWiam HarmonyNo ratings yet
- Travaux Diriges N 1 2 3 Sam Au 2021 2022Document9 pagesTravaux Diriges N 1 2 3 Sam Au 2021 2022Kam ZegNo ratings yet
- S7-PLCSIM - Test de Programme Avec CPU S7 Simulee - ManuelDocument72 pagesS7-PLCSIM - Test de Programme Avec CPU S7 Simulee - ManuelМхамед Аит АбдерахманNo ratings yet
- PageDocument17 pagesPageSofiane AltairNo ratings yet
- Cours API2Document124 pagesCours API2Mbarek OrabiNo ratings yet
- stm32 PDFDocument29 pagesstm32 PDFHaythem ChaouedNo ratings yet
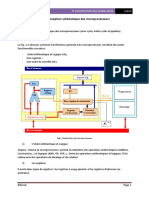
- TP3: Conception Schématique Des Microprocesseurs: ObjectifDocument6 pagesTP3: Conception Schématique Des Microprocesseurs: ObjectifDor SafNo ratings yet
- TDBD Part1Document24 pagesTDBD Part1Mbaye Babacar MBODJNo ratings yet
- A1-Présentation Des Machines Virtuelles AzureDocument27 pagesA1-Présentation Des Machines Virtuelles Azureichbin1199No ratings yet
- Cours SE1 Chap1Document15 pagesCours SE1 Chap1AmarMadridNo ratings yet
- Chp4 AutomatismeDocument15 pagesChp4 AutomatismeAbdl Karim Ben AchourNo ratings yet
- System 1 Id 048Document8 pagesSystem 1 Id 048Kam ZegNo ratings yet